

 机器人控制设计多核异构成趋势,不同内核优势各异的处理元件多样搭配
机器人控制设计多核异构成趋势,不同内核优势各异的处理元件多样搭配
描述
电子发烧友网报道(文/李宁远)工业机器人我们通常分为几个部分:控制器系统、机械手(驱动系统)、示教器、视觉与传感器、末端执行器。不同类型的工业机器人会有在轴设计和轴数上有些不同,也就是在驱动系统上略有不同,比如关节型机器人具有旋转轴,旋转轴的数量从简单的三轴结构到多个关节不等,CSARA具有两个平行轴等等,但在整体的控制设计上,都采取集中式设计或者分散式设计。
控制器系统
我们常常称机器人控制器系统是机器人的大脑,这里面包括了运动控制器、内部和外部通信系统以及任何潜在的功率级。潜在的功率级指的是,如果机器人要移动重物,肯定需要在电机上施加足够的力才能实现该功能。这个力由电能产生,并从功率级提供给电机。这个功率影响机器人属于高压系统还是低压系统。
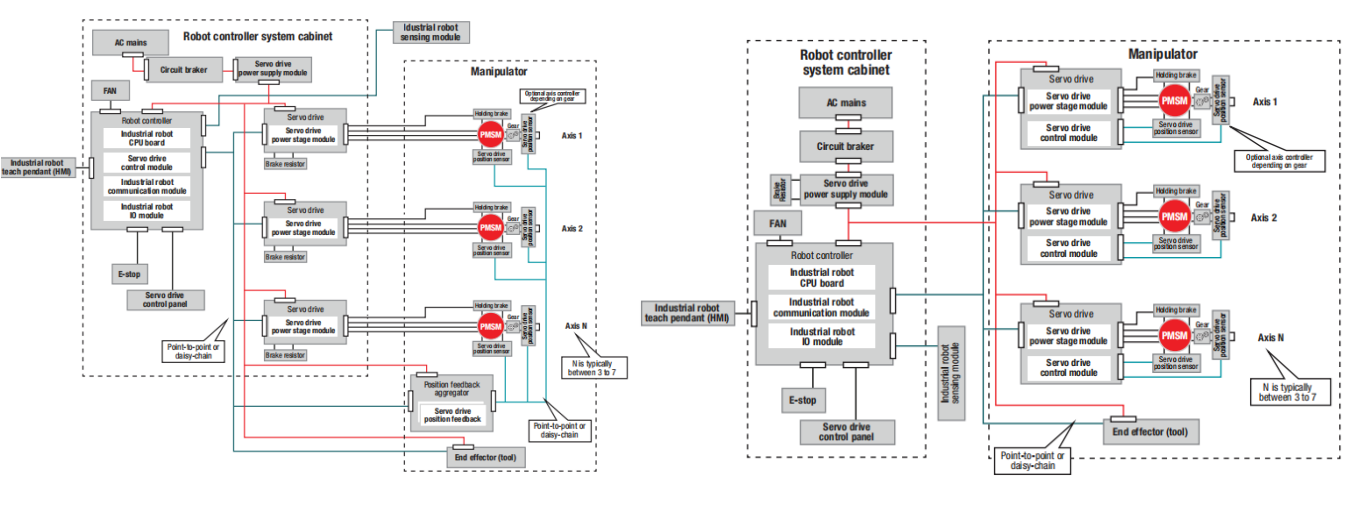
(集中式系统与分散式系统对比,TI)
集中式的机器人系统,机器人的控制柜会集中驱动系统的大多数电子模块,而在分散式系统中,这些模块中的其中一些模块将移至机器人的机械手驱动系统中,以支持多种外形尺寸,包括机柜的外形尺寸、电缆等。
目前大多机器人厂商都是提供集中式的控制系统,这样更方便。因为在分散式的系统中,伺服驱动相关电子器件的运行环境与在集中式系统中完全不同,通常需要对部分系统进行重新开发。
控制与伺服驱动
在自动化行业,伺服电机控制是一个老生常谈的通用技术了,工业4.0的兴起加速了自动化系统的升级,这也增加了伺服驱动的升级。现在的自动化系统要求伺服驱动能控制更多的轴数,能实现更多智能化的功能。
在控制系统需求还没有现在这么复杂的阶段,最常见的设计是用MCU以及FPGA来执行控制算法,并提供外设以连接至驱动器输出和电机反馈。这种设计我们已经见过很多了,基本上国内外做MCU的厂商都会涉及一部分这样的业务,国外知名的像TI的C2000系列,ST的STM32系列等等,国内知名的同样不少,国民的N32系列,峰岹的FU68系列,兆易的GD32E系列等等。功能要求不多的控制,单颗或多颗MCU就够了,有些会视情况加FPGA。加FPGA一般就是MCU负责通讯处理、系统母线监测和温度监测等、人机交互界面驱动等功能,FPGA负责逻辑处理和运动控制等功能,实现对整个伺服系统的协同控制。
就目前国内外MCU厂商提供的用于机器人控制器MCU来看,M4以及M4F内核居多,支持FPU浮点运算,主频也够高,可满足各种运动算法高算力需求,外设资源各异。M7内核加DSP的异构架构在高端领域的工业机器人中也很有优势。
(双核M7+M4 STM32H747,ST)
为了减少外部板需求,缩小空间降低成本,越来越多功能(通信、PLC等等)加入控制板中,集成性的提高意味着硬件性能也必须要跟上。从机器人控制系统的发展趋势里可以肯定的是多核异构架构才能满足机器人系统全部的处理需求。MCU+FPGA异构架构,MCU+DSP异构架构,MCU+MPU架构等多核异构设计在以后的机器人中会越来越常见。
以往厂商会优先考虑采用DSP来优化控制算法,但现在实时处理数据的能力越来越重要,因此带宽对伺服驱动是一个非常重要的指标,足够的带宽才能同时处理多个轴的输入,并留有足够的裕量用于其他功能。DSP在机器人控制里独立的方案越来越少,独立DSP正在越来越多地转向SoC的一个处理单元。
实时处理数据的能力越来越重要,所以Arm Cortex-A和Cortex-R内核在现在的机器人应用里也越来越常见,二者各有千秋。Cortex-A可以提供我们上面说到的高带宽,实现机器人对多轴数据的实时快速处理,高带宽也很方便进行网络通信等其他功能。但相比之下它缺少Cortex-R内核的实时组件,单论伺服控制方面Cortex-R会更适合。
小结
机器人系统控制往多核处理器靠拢,不同内核之间分散各个回路可以使专用于每个回路的处理带宽最大化,这肯定会提升系统的控制处理能力,并完成更多其它功能的实现。上面这些不同内核,优势各异的处理元件如何选择如何搭配在机器人控制设计中有着很多玩法与变化。
打开APP阅读更多精彩内容
控制器系统
我们常常称机器人控制器系统是机器人的大脑,这里面包括了运动控制器、内部和外部通信系统以及任何潜在的功率级。潜在的功率级指的是,如果机器人要移动重物,肯定需要在电机上施加足够的力才能实现该功能。这个力由电能产生,并从功率级提供给电机。这个功率影响机器人属于高压系统还是低压系统。
(集中式系统与分散式系统对比,TI)
集中式的机器人系统,机器人的控制柜会集中驱动系统的大多数电子模块,而在分散式系统中,这些模块中的其中一些模块将移至机器人的机械手驱动系统中,以支持多种外形尺寸,包括机柜的外形尺寸、电缆等。
目前大多机器人厂商都是提供集中式的控制系统,这样更方便。因为在分散式的系统中,伺服驱动相关电子器件的运行环境与在集中式系统中完全不同,通常需要对部分系统进行重新开发。
控制与伺服驱动
在自动化行业,伺服电机控制是一个老生常谈的通用技术了,工业4.0的兴起加速了自动化系统的升级,这也增加了伺服驱动的升级。现在的自动化系统要求伺服驱动能控制更多的轴数,能实现更多智能化的功能。
在控制系统需求还没有现在这么复杂的阶段,最常见的设计是用MCU以及FPGA来执行控制算法,并提供外设以连接至驱动器输出和电机反馈。这种设计我们已经见过很多了,基本上国内外做MCU的厂商都会涉及一部分这样的业务,国外知名的像TI的C2000系列,ST的STM32系列等等,国内知名的同样不少,国民的N32系列,峰岹的FU68系列,兆易的GD32E系列等等。功能要求不多的控制,单颗或多颗MCU就够了,有些会视情况加FPGA。加FPGA一般就是MCU负责通讯处理、系统母线监测和温度监测等、人机交互界面驱动等功能,FPGA负责逻辑处理和运动控制等功能,实现对整个伺服系统的协同控制。
就目前国内外MCU厂商提供的用于机器人控制器MCU来看,M4以及M4F内核居多,支持FPU浮点运算,主频也够高,可满足各种运动算法高算力需求,外设资源各异。M7内核加DSP的异构架构在高端领域的工业机器人中也很有优势。
(双核M7+M4 STM32H747,ST)
为了减少外部板需求,缩小空间降低成本,越来越多功能(通信、PLC等等)加入控制板中,集成性的提高意味着硬件性能也必须要跟上。从机器人控制系统的发展趋势里可以肯定的是多核异构架构才能满足机器人系统全部的处理需求。MCU+FPGA异构架构,MCU+DSP异构架构,MCU+MPU架构等多核异构设计在以后的机器人中会越来越常见。
以往厂商会优先考虑采用DSP来优化控制算法,但现在实时处理数据的能力越来越重要,因此带宽对伺服驱动是一个非常重要的指标,足够的带宽才能同时处理多个轴的输入,并留有足够的裕量用于其他功能。DSP在机器人控制里独立的方案越来越少,独立DSP正在越来越多地转向SoC的一个处理单元。
实时处理数据的能力越来越重要,所以Arm Cortex-A和Cortex-R内核在现在的机器人应用里也越来越常见,二者各有千秋。Cortex-A可以提供我们上面说到的高带宽,实现机器人对多轴数据的实时快速处理,高带宽也很方便进行网络通信等其他功能。但相比之下它缺少Cortex-R内核的实时组件,单论伺服控制方面Cortex-R会更适合。
小结
机器人系统控制往多核处理器靠拢,不同内核之间分散各个回路可以使专用于每个回路的处理带宽最大化,这肯定会提升系统的控制处理能力,并完成更多其它功能的实现。上面这些不同内核,优势各异的处理元件如何选择如何搭配在机器人控制设计中有着很多玩法与变化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案2025-11-14 1104
-
机器人餐厅2014-07-26 2597
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
机器人与未来2015-12-29 6825
-
工业机器人应用趋势和市场前景2016-03-09 3479
-
CPU+FPGA,机器人最强大脑即将问世2017-03-20 3729
-
辰汉-如何实现服务机器人的运算与控制2017-06-09 2989
-
工业机器人的产业链2017-08-23 4601
-
先进机器人控制2017-09-19 4583
-
新品发布,多核异构 OK5718-C开发板免费试用!2018-05-11 3927
-
数控机床机器人的优势2018-11-22 2748
-
多轴机器人的发展趋势2020-07-29 7494
-
【四足机器人】SOLO技术详解--(1)介绍(2)平台和机器人概述【翻译】精选资料分享2021-09-13 2131
-
打造一个异构机器人平台2022-07-27 1928
-
ZMC600E,多核异构如何成就机器人精准控制?2025-02-24 807
全部0条评论

快来发表一下你的评论吧 !
