

 高集成度感测元件助力下的连续波与脉冲ToF深度传感
高集成度感测元件助力下的连续波与脉冲ToF深度传感
描述
电子发烧友网报道(文/李宁远)ToF的测距原理其实并不复杂,通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,计算探测光脉冲的飞行时间来得到目标物距离。这和机器视觉中另一种主流的传感器3D激光传感原理是类似的。区别在于,3D激光传感器是逐点扫描,而ToF相机是同时得到整幅图像的深度(距离)信息。
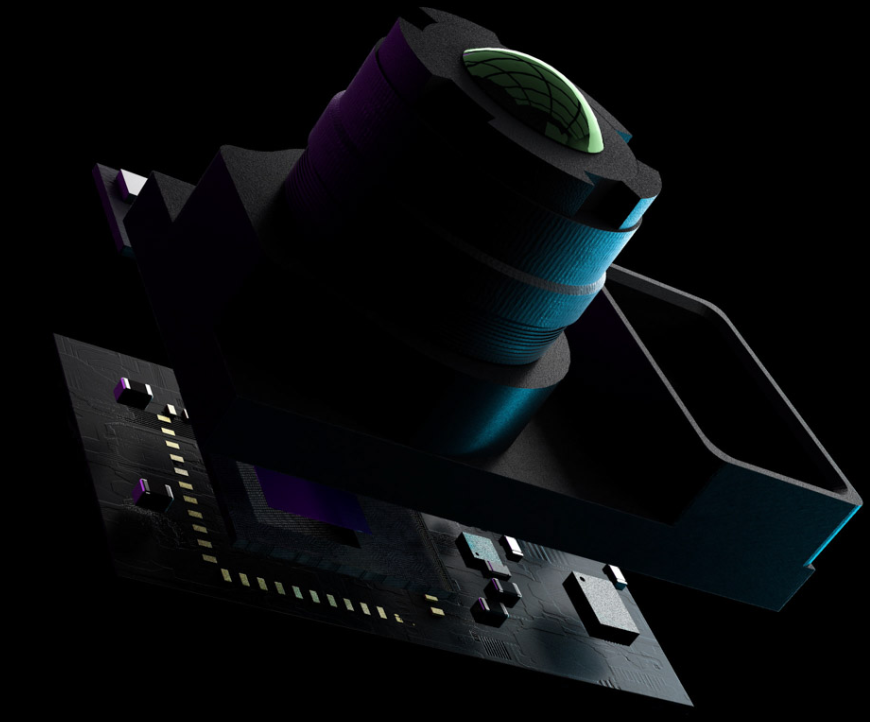
(基于Infineon REAL3的3D摄像头模块,pmd)
连续波VS脉冲
ToF采用的测量方法目前主流的有连续波CW和脉冲两种。不管是何种技术系统,连续波CW和脉冲都需要考虑测量距离、系统环境、精度要求、功耗和尺寸。
连续波CW采用周期调制信号进行主动发光,然后对接收到的信号进行零差解调以测量反射光的相移。目前市面上应用广泛的连续波CW技术系统都使用CMOS传感器。CMOS传感具有很高的输出数据速率,但连续波传感需要在多个调制频率下多帧处理计算深度。一旦系统在曝光较长,那么系统的整体帧率就会受到限制,模糊运动轨迹。处理上的复杂性增加可能会导致要在外部引入处理器,因此连续波CW系统并不适用于所有类型的应用。
不过换个角度想,CMOS成像器在更快的速度之外,灵活性也相对较高,能实现的功能也丰富。而且对于对精度要求不高的应用,连续波CW系统会比脉冲系统更容易实现,它并不像CCD对激光脉冲的要求那么严苛。而且不能忽视的一点是,在成像器系统中,CMOS比非CMOS的电源设计简单得多,比如CCD会要求更高的正负极电源。
到了更远距离的测量距离和更强环境光的场景应用中,脉冲技术系统优势更大,连续光CW系统在这种应用里不可避免地要提高光功率,高强度的连续光信号很难使器件不出现散热等方面的问题。脉冲技术在这种情况下优势更大是因为,脉冲技术系统能在很短的时间内发出高能光脉冲,对于室外这种环境光强烈的场景它展现出的鲁棒性更强。而且脉冲系统中的信号占空比通常比同等水平的连续波CW系统要低得多,系统的总功耗会有明显的下降。
不过脉冲系统需要对系统的时序控制极其精准,远超过连续波CW技术系统的时序控制难度,有些应用甚至要到皮秒级。脉冲系统对功率的要求也很严苛,否则无法达到足够短的脉冲宽度。
不管是CMOS还是CCD技术路线,都是基于帧的图像传感,目前也有基于事件的图像传感,分辨率不再由固定的时序源(帧时钟)控制,而是由信号在幅度域的变化来控制,并在检测到变化或运动时进行记录。目前这种图像传感也能实现很快的动态范围。
高度集成的ToF器件
光发射器和接收器构成了ToF远距离接近传感和距离感测系统的感测元件。发射器发送调制光脉冲,模拟前端测量光脉冲的往返时间。ToF传感器的高速高分辨率很大程度上依赖于其模拟前端的性能,现在ToF AFE的集成度也是越来越高。ADC、时序序列器和数字处理引擎甚至照明驱动都会完整地集成在AFE中,接下来只需要灵活定制光电二极管和发射极即可。
像TI目前在AFE上推的OPT3101就是ToF连续波CW技术的高速、高分辨率 AFE。集成了完整的深度处理管道,ADC、时序序列器和数字处理引擎都在其中。采样率能达到4kHz,能在15m的清晰范围内具有16位距离输出。AFE在1kHz时有88dB信号相位动态范围。
(连续波AFE OPT3101,TI)
ADI深度传感推的ADDI9036则是CCD TOF成像前端,包括一个模拟前端、一个时序发生器、一个激光二极管驱动、一个H驱动和一个垂直驱动,集成度也是相当的高。ADC的配置同样是12位45MHz,在45MHz频率下分辨率为174 ps。
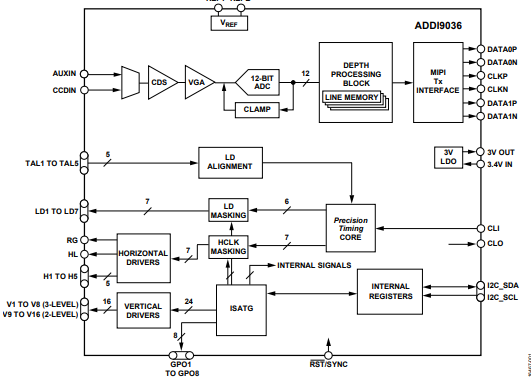
(CCD前端ADDI9036,ADI)
行业主流的ToF厂商pmd的CMOS 3D深度传感则用了Infineon的SoC REAL3系列。REAL3以毫秒级的捕获速度实时传送深度数据,在恶劣环境条件下有极高的鲁棒性。而且其抑制背景照明(SBI)的专利技术,REAL3能抵御阳光或其他红外发射光源等外部光源,稳定性很高。
小结
目前在深度传感领域,ToF相机凭借更小的外形尺寸、更宽的动态感测范围,以及在多种环境下工作的能力,配合强大的AI算法成为首选的深度传感方法。尤其在工业以及汽车市场的应用场合,ToF解决了很多传统2D技术束手无策的问题。
打开APP阅读更多精彩内容
(基于Infineon REAL3的3D摄像头模块,pmd)
连续波VS脉冲
ToF采用的测量方法目前主流的有连续波CW和脉冲两种。不管是何种技术系统,连续波CW和脉冲都需要考虑测量距离、系统环境、精度要求、功耗和尺寸。
连续波CW采用周期调制信号进行主动发光,然后对接收到的信号进行零差解调以测量反射光的相移。目前市面上应用广泛的连续波CW技术系统都使用CMOS传感器。CMOS传感具有很高的输出数据速率,但连续波传感需要在多个调制频率下多帧处理计算深度。一旦系统在曝光较长,那么系统的整体帧率就会受到限制,模糊运动轨迹。处理上的复杂性增加可能会导致要在外部引入处理器,因此连续波CW系统并不适用于所有类型的应用。
不过换个角度想,CMOS成像器在更快的速度之外,灵活性也相对较高,能实现的功能也丰富。而且对于对精度要求不高的应用,连续波CW系统会比脉冲系统更容易实现,它并不像CCD对激光脉冲的要求那么严苛。而且不能忽视的一点是,在成像器系统中,CMOS比非CMOS的电源设计简单得多,比如CCD会要求更高的正负极电源。
到了更远距离的测量距离和更强环境光的场景应用中,脉冲技术系统优势更大,连续光CW系统在这种应用里不可避免地要提高光功率,高强度的连续光信号很难使器件不出现散热等方面的问题。脉冲技术在这种情况下优势更大是因为,脉冲技术系统能在很短的时间内发出高能光脉冲,对于室外这种环境光强烈的场景它展现出的鲁棒性更强。而且脉冲系统中的信号占空比通常比同等水平的连续波CW系统要低得多,系统的总功耗会有明显的下降。
不过脉冲系统需要对系统的时序控制极其精准,远超过连续波CW技术系统的时序控制难度,有些应用甚至要到皮秒级。脉冲系统对功率的要求也很严苛,否则无法达到足够短的脉冲宽度。
不管是CMOS还是CCD技术路线,都是基于帧的图像传感,目前也有基于事件的图像传感,分辨率不再由固定的时序源(帧时钟)控制,而是由信号在幅度域的变化来控制,并在检测到变化或运动时进行记录。目前这种图像传感也能实现很快的动态范围。
高度集成的ToF器件
光发射器和接收器构成了ToF远距离接近传感和距离感测系统的感测元件。发射器发送调制光脉冲,模拟前端测量光脉冲的往返时间。ToF传感器的高速高分辨率很大程度上依赖于其模拟前端的性能,现在ToF AFE的集成度也是越来越高。ADC、时序序列器和数字处理引擎甚至照明驱动都会完整地集成在AFE中,接下来只需要灵活定制光电二极管和发射极即可。
像TI目前在AFE上推的OPT3101就是ToF连续波CW技术的高速、高分辨率 AFE。集成了完整的深度处理管道,ADC、时序序列器和数字处理引擎都在其中。采样率能达到4kHz,能在15m的清晰范围内具有16位距离输出。AFE在1kHz时有88dB信号相位动态范围。
(连续波AFE OPT3101,TI)
ADI深度传感推的ADDI9036则是CCD TOF成像前端,包括一个模拟前端、一个时序发生器、一个激光二极管驱动、一个H驱动和一个垂直驱动,集成度也是相当的高。ADC的配置同样是12位45MHz,在45MHz频率下分辨率为174 ps。
(CCD前端ADDI9036,ADI)
行业主流的ToF厂商pmd的CMOS 3D深度传感则用了Infineon的SoC REAL3系列。REAL3以毫秒级的捕获速度实时传送深度数据,在恶劣环境条件下有极高的鲁棒性。而且其抑制背景照明(SBI)的专利技术,REAL3能抵御阳光或其他红外发射光源等外部光源,稳定性很高。
小结
目前在深度传感领域,ToF相机凭借更小的外形尺寸、更宽的动态感测范围,以及在多种环境下工作的能力,配合强大的AI算法成为首选的深度传感方法。尤其在工业以及汽车市场的应用场合,ToF解决了很多传统2D技术束手无策的问题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
国产高精密、高集成度多通道模拟量采集AFE助力工业4.02025-01-21 1544
-
智能马桶脚感方案 TOF传感器选型推荐2024-11-22 12086
-
TI解决方案助力高速光模块市场,提供高集成度,更小封装电源解决方案2022-10-28 679
-
基站对高集成度低噪放的要求是什么?2021-05-21 1407
-
友恩半导体持续开发高功率、低功耗、高集成度等产品2020-10-30 2548
-
一文知道连续波ToF和脉冲ToF的区别2020-08-24 5262
-
高集成度RF IC是什么?2019-09-30 3742
-
高集成度电源IC LTC35892019-09-20 1968
-
高集成度惯性传感器能实现什么功能?2019-09-02 2383
-
连续波与脉冲波的区别2017-11-14 45444
-
集成度是什么意思_集成度的概念2017-11-10 20419
-
高集成度蓝牙4.0模块2016-06-06 2960
-
高集成度设计对IC创新设计的影响2013-01-07 1769
-
ST推出业界集成度最高的高性能超声波脉冲控制器2010-02-23 1275
全部0条评论

快来发表一下你的评论吧 !
