

雷达信号处理推动汽车应用中的自动化
今日头条
描述
汽车电子自动化推动了交通领域的下一次创新飞跃,其基本前提是:在汽车应用中,车辆必须能够准确地感知周围环境。
事实上,汽车不仅必须准确感知自身的距离、速度和方向,还必须准确感知可能穿过其路径的任何物体的距离、速度和方向。雷达是收集这些数据的最佳方式,这些汽车系统必须成功地解读数据才能做出生死攸关的决定。
雷达的工作原理
为了确定附近是否有可能影响汽车的物体,汽车系统必须确定物体的方向或到达角 (AoA)、速度和距离,以及检测到的物体是真实的还是来自背景中的噪音或杂乱。图 1 显示了如何收集雷达数据。
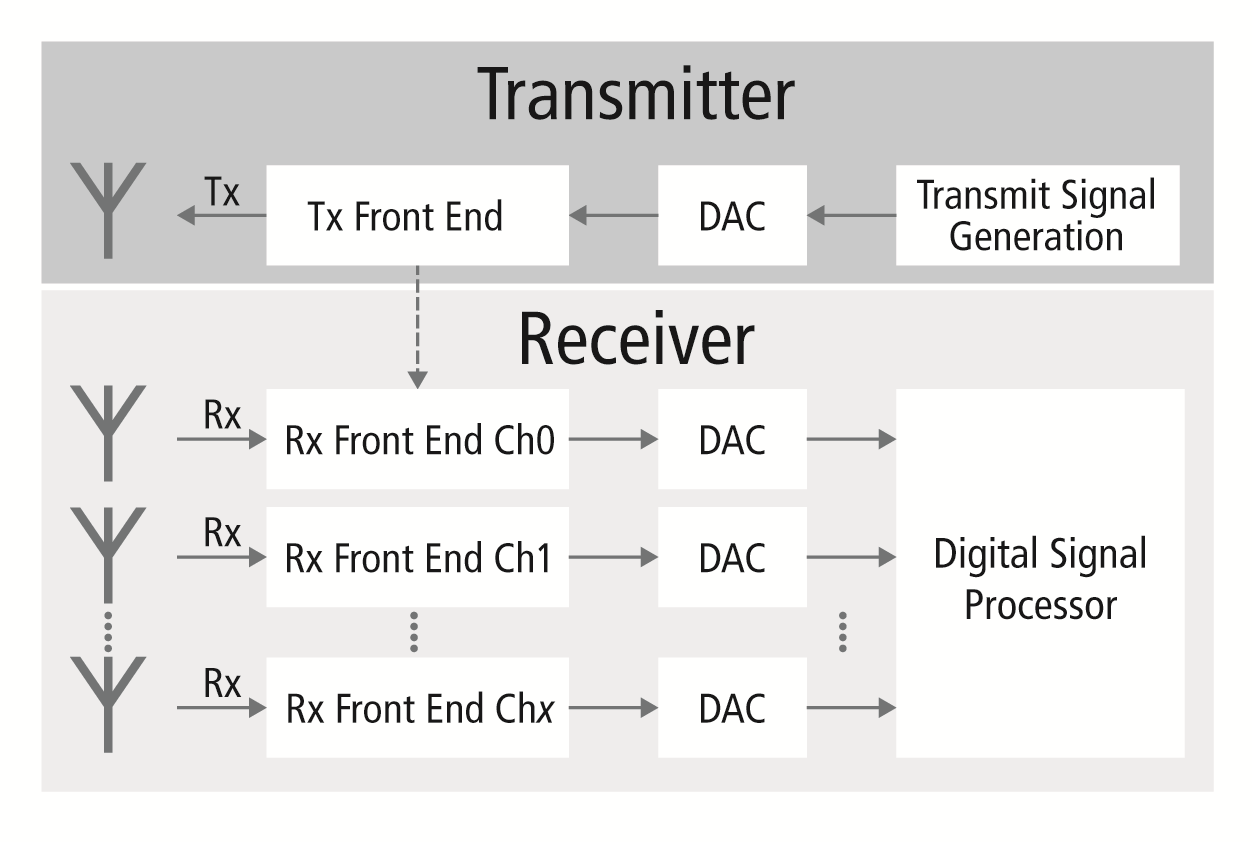
图 1:雷达系统框图。
生成数字发射信号并将其转换为模拟格式和发射信号 (TX)。
这些信号从发射天线释放到环境中。
信号“反弹”或反射回接收器 (RX),并通过模数转换器 (ADC) 转换回数字数据。
然后数据由数字信号处理器 (DSP) 处理,以根据该数据做出决策。
DSP:判断是否停止
影响 DSP 执行决策过程的值包括三个主要因素,如图2所示:
方向:在处理流程中,来自输入数据立方体的样本使用空间波束形成滤波器进行过滤,以创建数字波束,作为数字波束形成 (DBF) 模块的一部分。
速度和距离:这些波束通过二维快速傅里叶变换 (FFT) 算法沿距离和多普勒轴进行进一步处理。
CFAR:恒定误报率或 CFAR,作为“过滤器”来确定检测到的对象是否可能是真实对象或背景“噪声”的一部分。
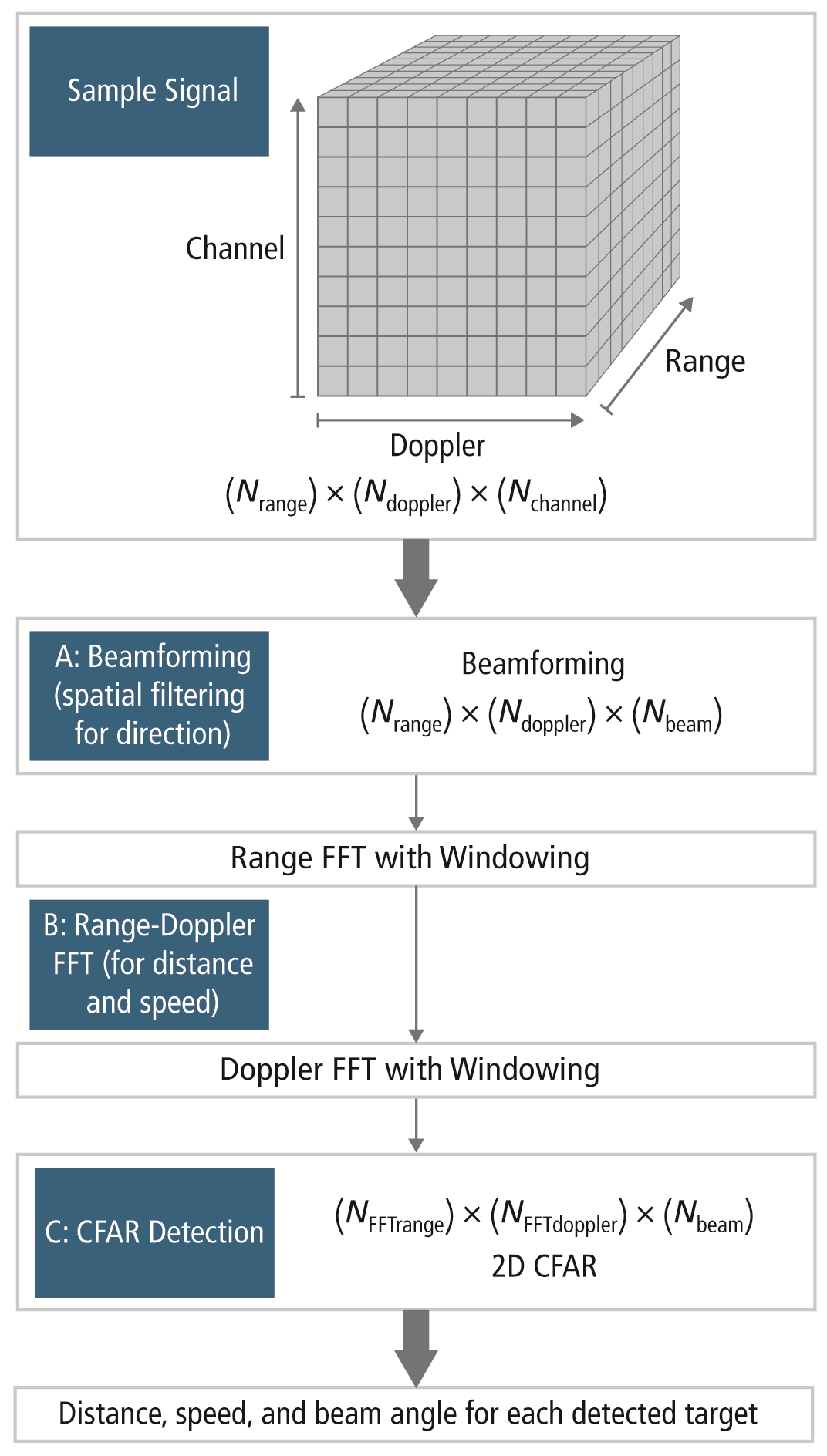
图 2:DSP 框图和流程。
为了实现高效,处理器必须同时执行数据处理和数据传输。软件的结构应尽量减少数据传输,并且直接内存访问 (DMA) 应用于与模块计算同时执行数据传输。
A. 定向波束成形
DBF 内核沿数据立方体中的通道维度执行有限脉冲响应 (FIR) 滤波。FIR 滤波器的长度等于天线单元的数量(在这种情况下为 8 个),并且预先选择 FIR 抽头以传递来自以特定预定空间方向为中心的波束的信号并抑制来自其他方向。
在实践中,DBF 将数据立方体处理为输入,并产生距离多普勒 2D 信号作为输出光束。不同组的 FIR 抽头可用于使用相同的数据立方体生成多个光束信号。在此示例中,使用单独的 FIR 抽头组沿不同方向生成五个光束。
B. 速度和距离的多普勒和距离 FFT
雷达使用距离多普勒维度的二维频域频谱进行处理。该频谱是通过执行 2D FFT — 沿距离维度执行 1D FFT,然后沿多普勒维度执行 1D FFT — 并因此形成图 2中所示的立方体而获得的。
二维距离多普勒 FFT 内核用于将 DBF 内核产生的五个二维波束信号中的每一个转换为二维频域频谱。加窗 2D FFT 用于分离信号,范围 FFT 沿距离维度,然后是多普勒 FFT,沿多普勒维度。每个一维 FFT 还使用一个汉明窗。
范围 FFT 计算为一维 FFT,而多普勒 FFT 执行为基于块的 FFT,以避免转置输入和输出。FFT 算法基于基于 Kronecker 乘积的形式化。在最后阶段,多普勒 FFT 内核计算每个 bin 的逐点能量。
C. 用于目标检测的 CFAR
CFAR 的作用是确定阈值,超过该阈值的任何回报都可以被认为可能来自目标。如果此阈值太低,则会检测到更多目标,但会增加误报数量。
相反,如果阈值过高,则检测到的目标较少,但误报的数量也较低。在大多数雷达探测器中,这个阈值是通过算法确定的,以计算误报的概率——或者等效地,误报率或误报之间的时间。
CFAR 内核对频域中的 2D 能量信号进行操作,通过将每个 CUT 与缩放估计值进行比较,将 2D FFT 能量信号中的每个 bin 或被测单元 (CUT) 分类为目标(正)或噪声/杂波噪音和混乱。使用的比例因子和阈值由误报概率或 CFAR 确定。
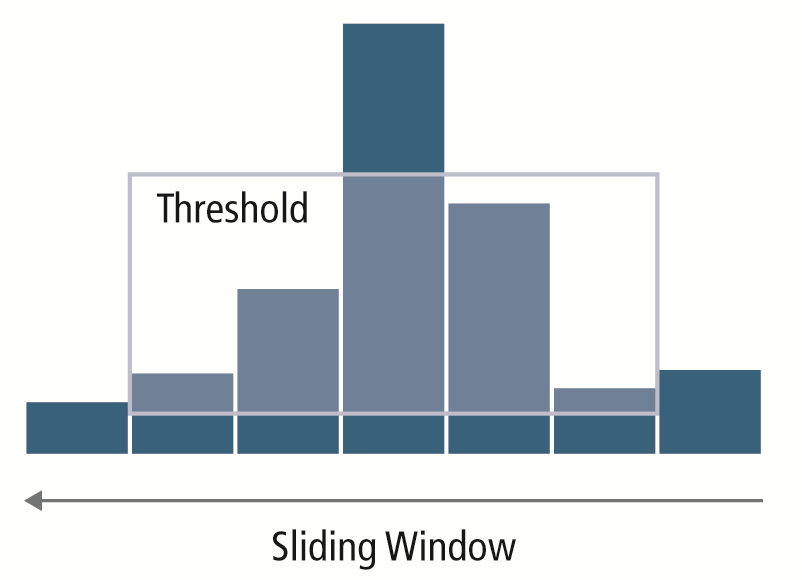
图 3:显示阳性结果和检测超过阈值的 CFAR 图。
在图 3中,调制良好的 CFAR 是阈值,“正”是检测超过阈值的地方。换句话说,为了确定目标,将 CUT 的值与 CFAR 进行比较——计算阈值以确定 CUT 周围的本底噪声水平。
CFAR 是通过检查 CUT 周围的一个单元块来计算的(图 4)。为了避免使用来自 CUT 本身的值破坏该估计,通常会忽略与 CUT 相邻的单元或保护单元。如果目标的值大于其所有相邻单元格(CFAR 或噪声和杂波阈值),则声明目标存在于 CUT 中。
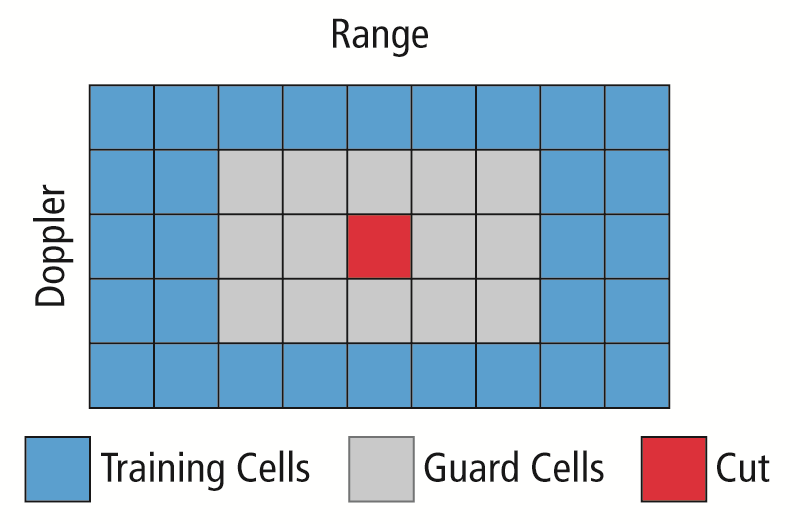
图 4:CFAR 块处理。
CFAR 内核的区别在于如何使用训练单元形成噪声估计。例如,单元平均恒定误报率(CA-CFAR)噪声估计是通过对训练区域中的单元的值进行平均来形成的,而有序统计恒定误报率(OS-CFAR)噪声估计是由以降序对训练区域的单元格值进行排序,并使用第 N个 排序值。
也可以使用 CA-CFAR 和 OS-CFAR 的组合。AND CFAR 组合对每个 CUT 的 CA-CFAR 和 OS-CFAR 的分类结果执行逻辑 AND,而 OR CFAR 组合执行逻辑 OR。
DSP:决策者
在计算出方向、速度、距离和 CFAR 后,DSP 将能够确定孩子从操场扔到迎面而来的汽车的路径中的球是否可能会在当前轨迹上拦截车辆,以及是否必须采取规避措施。换句话说,嵌入式系统将有助于使整个车辆对每个人都更安全。
审核编辑:汤梓红
-
汽车雷达回波发生器的技术原理和应用场景2024-11-15 4598
-
提高汽车安全性中雷达系统的应用2012-10-21 3106
-
自动化应用案例,解决方案汇总2014-06-29 3626
-
汽车制造中的机械自动化技术应用2018-02-28 6864
-
自动化技术推动汽车控制系统的可持续发展2018-03-26 4579
-
自动化行业中的全厂自动化中的以太网/IP2018-10-22 2304
-
基于单片机的工厂自动化应用2019-07-16 3403
-
实现汽车倒车雷达系统的设计方法2021-11-12 1536
-
汽车ADC如何对ADAS技术进行大幅改进2022-11-04 935
-
盘点未来汽车中的自动化技术2014-03-18 2380
-
激光雷达(LiDAR)技术借此夯实了其在汽车自动化的地位2018-05-29 808
-
数字信号处理推动雷达信号链向数字化过渡2018-04-22 1650
-
博世汽车电子:应用所学推动业务的自动化进程2022-04-19 2086
-
自动驾驶中的雷达信号处理2023-06-07 687
-
工控自动化电流信号隔离栅2024-10-28 2223
全部0条评论

快来发表一下你的评论吧 !
