

使用电容式传感器实现点式和连续式液位传感
MEMS/传感技术
描述
在 本文的第 1 部分中,我们解释了流行的液位传感方法及其局限性。我们还深入研究了为什么电容传感技术优于用于液位传感的传统方法。
在这里,我们将探讨如何在点级和连续级传感应用中实现电容传感器。但首先,让我们看一下电容传感器在液位传感系统中的工作原理(图 1)。
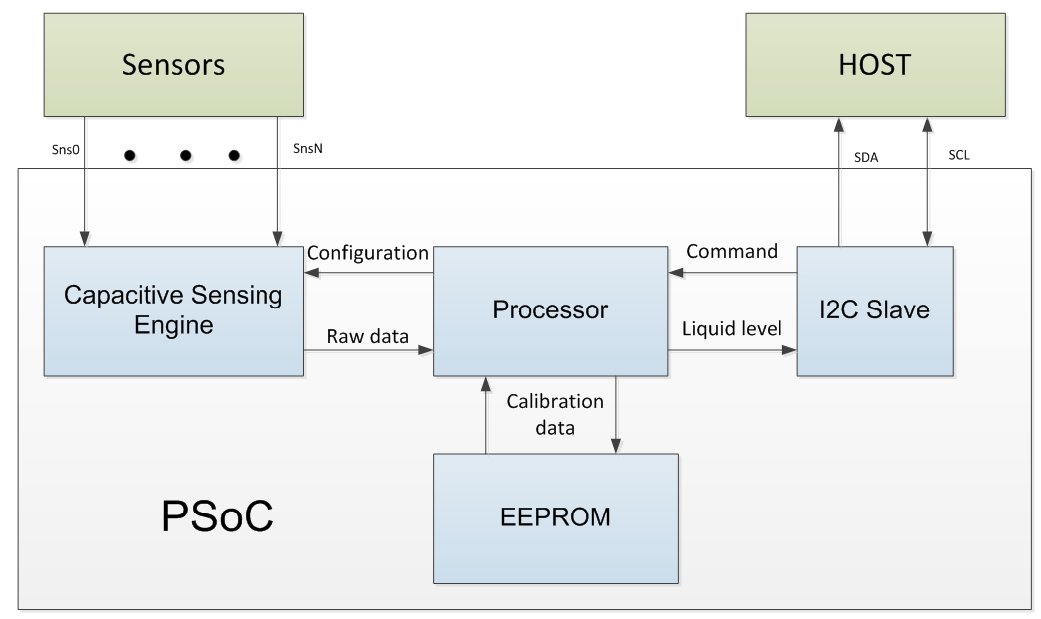
图 1:液位传感系统框图。
微控制器(例如赛普拉斯 PSoC)采用电容传感器输入并在 CPU 和电容感应引擎(在 PSoC 术语中称为 CapSense)的帮助下计算液位。然后将液位信息发送到系统主机以进行进一步操作,同时将校准数据存储在 EEPROM 中。
实施点位感应 点位感应根据应用要求使用一个或多个传感器放置在罐上的离散水平面上。这种传感方法依赖于各个传感器的开/关状态来确定液位。
图 2 显示了一个储罐,其底部装有一个传感器,用于检测空位。根据传感器的开/关状态确定罐空状态。当水箱未空且充满导电液体时,传感器将开启。当水箱空了时,传感器将关闭。
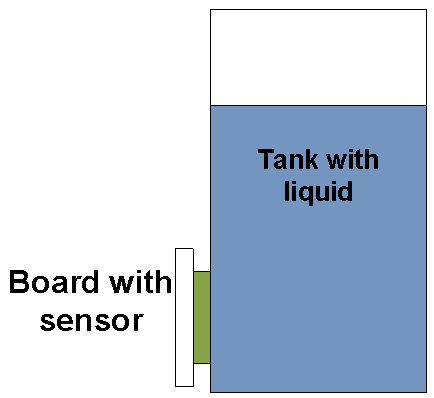
图 2:用于空位检测的电容式传感器。
需要注意的是,在点级传感操作中,传感本身需要一个参考。如果参考不正确,感应将不准确。在电容感应方法中,基线是参考。
通常,对于基于电容感应的实现,对于用户界面,系统假定在通电时没有手指接触传感器。因此,基线是使用传感器特性初始化的,主要是寄生电容——传感器相对于系统接地的电容。
但在液位传感方面,设置基线并不像开发用户界面那么简单。上电时没有液体,传感器熄灭,表示水箱是空的。并且当水箱充满液体时,液体会增加电容,传感器会开启,表明水箱未空。
但是,如果在通电时罐中有液体,则可能会出现问题,尤其是在原始计数方面——当电容感应电路将测量的电容转换为数字计数时。由于上电时测量的原始计数用作基准参考,因此传感器将报告为关闭,表明储罐未清空时为空。
有两种方法可以解决这个问题:可靠的参考方法和校准方法。
可靠的参考方法
该方法使用与用于检测液位的传感器具有相似特性的虚拟传感器进行。但是,它不会与液体直接接触。换言之,该传感器必须不受液位的影响。
然后可以将虚拟传感器的原始计数用作实际传感器的参考,因为这两个传感器具有相同的物理特性,并且理想情况下具有相同的基线。让 C X 是虚拟传感器和没有液体的罐空检测传感器的电容。令 C L 为液体增加的电容。
无液体: 虚拟传感器电容 = C X 空罐检测器 - 传感器电容 = C X
使用液体: 虚拟传感器电容 = C X Tank-empty检测器-传感器电容 = C X + C L
测量罐空检测传感器和虚拟传感器的电容(C L )的差值以检测罐是否为空。

图 3:带有虚拟传感器的板,显示前视图(左)和侧视图(右)。
设计虚拟传感器对于布局设计师来说可能是一个挑战。一个经验法则是,在设计虚拟传感器时,用于检测的传感器和虚拟传感器的电容应该相同。为此,建议采用以下布局建议:
• 虚拟传感器尺寸:应与用于液位检测的传感器相同。• 传感器走线长度:应与用于液位检测的传感器具有相同的走线长度。但是,可以改变走线长度以匹配电容。• 过孔数量:必须与用于液位检测的传感器相同。为了减少整体寄生电容,通孔的数量必须限制为最多三个。• 传感器放置:虚拟传感器和用于液体检测的传感器必须放置在 PCB 的不同层上。
校准方法 传感器在用于传感前需要在工厂校准。有和没有液体的传感器的原始计数应存储在 EEPROM 中。接下来,在完成校准后,将传感器的运行时原始计数与存储的原始计数进行比较,以确定传感器的开/关状态。
实现连续液位感应
以咖啡机为例,它使用电容式传感器的连续液位感应。连续液位传感需要一个传感板,主要由一个发射器 (TX) 和“n”个接收器 (RX) 传感器组成,而“n”是接收器传感器的数量。该值取决于罐的高度和所需的液位传感分辨率。
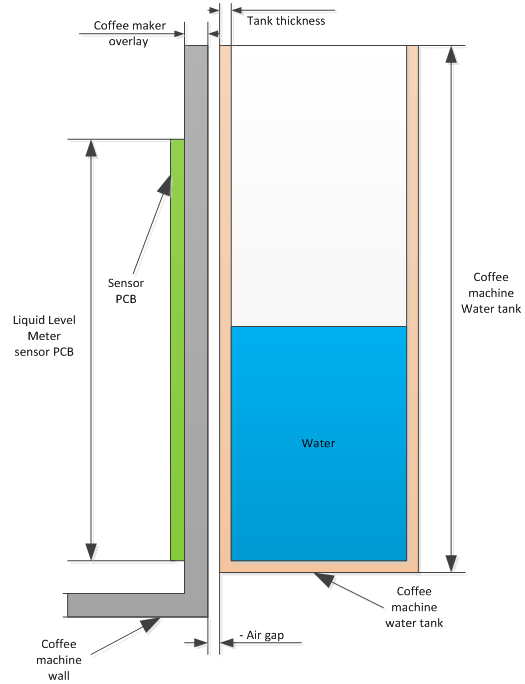
图 4:液位传感器堆叠。
如图 4所示,传感板垂直放置在水箱的侧面。传感可以在固件中完成,如有必要,还可以使用其他技术,以满足系统级要求,例如精度、线性度、响应时间和功耗。
校准对于获得与空罐和满罐相对应的准确信号是必要的。罐满时校准和罐空时校准称为两点校准。
此外,为了减少温度等外部因素的影响,校准过程应考虑空信号 和满信号的多个样本。在这里,已发现 256 个样本数量很多。每个完整信号样本是 所有单个传感器的完整信号 的平均值。
类似地,每个空信号样本是 所有单个传感器的空信号 的平均值。在收集了 256 个样本后,取所有这些样本的平均值并将其存储为校准数据。在校准过程中,推荐的样本数量为 256 个,而传感器的数量为 13 个。
审核编辑:汤梓红
-
电容式液位传感器原理是什么?2025-11-11 2911
-
光电液位传感器对比电容式液位传感器2023-12-29 1614
-
光电液位传感器对比电容式液位传感器2023-10-21 2491
-
光电式液位传感器和电容式液位传感器2023-06-15 3471
-
电容式液位传感器原理2023-03-10 1603
-
电容式液位传感器是非接触式液位传感器吗?使用方便吗?2023-02-18 7014
-
电容式液位传感器-选型表2022-11-18 2478
-
电容式液位传感器与光电液位传感器的区别2022-06-17 4194
-
电容式传感器的工作原理以及电容式传感器的特点2020-12-18 51773
-
光电液位传感器与电容式液位传感器在液位测量中有什么不同?2020-03-02 5298
-
电容式连续液位检测原理2019-11-19 2080
-
电容式与电热式液位传感器的识别2018-11-16 2354
-
电容式液位传感器比浮球式可靠在哪里2018-11-06 1737
-
电容式液位传感器工作原理、技术参数、应用、特点等介绍2018-06-06 12085
全部0条评论

快来发表一下你的评论吧 !
