

为汽车系统选择最佳电机组件和算法
今日头条
描述
除了电动汽车 (EV) 用于推进的多千瓦交流牵引电机外,还有许多其他辅助电机需要高效、精确、安静和可靠地驱动。然而,许多供应商习惯于皮带驱动或液压驱动系统,还有一些供应商正在考虑将这些辅助系统的设计引入内部。
然而,事情并没有那么简单:驱动这些电机需要创新的电机位置传感和驱动算法方法,以及对驱动电路和组件的谨慎选择(图 1)。
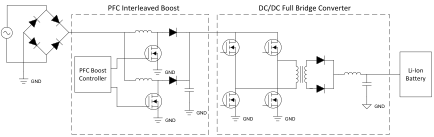
图 1:EV 电机需要创新的电机位置传感和驱动算法方法,以及驱动电路和组件的仔细选择。
辅助电机用于在车辆中运行辅助功能,并且在历史上已经通过来自内燃机或液压系统的能量从皮带上驱动。但在现代电动汽车中,交流压缩机、流体泵、风扇、鼓风机、涡轮增压器,甚至是农用设备或叉车上的专用工具都需要由电动机驱动(图 2)。这些应用程序中的大多数在性质上都非常相似。它们通常包括低压总线(12、24 或 48 V)和中低电流(<5 A 至 50 A)。

图 2:电动汽车中的主电机往往受到所有关注,但还有许多其他辅助电机需要高效、精确、安静和可靠地驱动。
电机用于在不同负载下控制可变速度或转矩。尽管出于历史原因,有些人可能仍然使用霍尔效应传感器进行换向,但几乎所有这些传感器都用于不需要传感器的应用——如果开发人员具有适当的硬件和软件专业知识的话。
MOSFET:关键驱动组件
MOSFET 是用于为三相逆变器系统中电机的每一相供电的组件。由于 FET 寄生的高阈值电压和大量电容(通常 >100 pF),必须使用驱动器 IC(栅极驱动器)来驱动 MOSFET 的栅极。用于辅助三相电机系统的现代栅极驱动器集成了许多对整个系统的可靠性和性能很重要的特性。这些基于保护、可配置性、材料构建/电路板尺寸减小和电机控制性能。
由于 MOSFET 是为三相供电的关键组件,因此它们是最需要保护的。当今可用的行业领先的栅极驱动器应通过集成 Vds 和 Vgs 监控外部 FET、片上热测量、用于监控电流的集成分流放大器、电源监控来为整个系统提供多层保护。和过电压和击穿保护。
电机驱动波形注意事项
三相逆变器的开关需要由数字逻辑控制,通常是可编程微控制器 (MCU),以调节电机的扭矩或速度,同时最大限度地提高效率。在电机上使用霍尔效应传感器可以相当简单地使用六步(梯形)换向控制技术控制无刷直流 (BLDC) 电机,但数字逻辑资源有限,例如非常小的 MCU 甚至是硬编码的 ASIC .
这种六步方法在扭矩效率低下存在一些限制:
六步梯形开关仅在六个方向中的一个方向上产生定子磁场,而如果定子磁场可以在与不断移动的转子磁场的特定同步方向上产生,则电机效率将最大化。
这六种状态之间的切换会导致电机扭矩的波动——瞬间降低,然后进行校正。这会影响速度控制的质量并影响可听噪声。
动态性能(调整扭矩产生以满足瞬时负载要求的能力)会受到影响。
电机缠绕以产生正弦反电动势电压的效率进一步降低;当使用正弦波而不是方波驱动时,大多数电机运行效率更高。
对于非常简单的 EV 电机应用,BLDC 方法可能就足够了。但对于其他人来说,这些限制可能会很严重。一种对大多数此类电机效果更好的方法称为磁场定向控制 (FOC)。在 FOC 中,产生的定子磁场与转子磁场定向并同步,从而最大限度地产生扭矩。定子状态之间的过渡是平滑的,消除了转矩脉动,提高了系统的动态性能。电机相位看到的电压是正弦曲线,从而提高了效率。FOC 并不比六步 BLDC 复杂得多。它测量至少两个相电流而不是一个总线电流,它进行额外的数学计算,采用额外的比例积分 (PI) 控制器,并为脉宽调制 (PWM) 生成进行了更多计算。
但是,存在转子传感器的问题。六步 BLDC 中使用的霍尔传感器无法为 FOC 提供足够的转子磁场定位精度。此外,霍尔传感器由于其低可靠性和高系统故障率而具有更多的前期和生命周期成本。此外,由于机械限制,某些应用根本无法使用霍尔传感器。
一种解决方案可能是使用不同类型的转子磁传感器。用于高精度伺服驱动器的数字编码器和用于 EV 推进电机的模拟旋转变压器都具有 FOC 所需的分辨率。然而,与简单的霍尔传感器相比,它们既昂贵又不实用。或者,由于机械限制,它们无法安装。唯一的解决方案是无传感器 FOC。
无传感器 FOC 实用化
无传感器 FOC 依靠软件算法根据逆变器中的电流和/或电压来估计转子磁场位置。无传感器转子位置估计器的理论化、开发和使用已超过 25 年,但其实际实施仅限于那些在开发所需专业知识方面进行大量投资的公司。这些公司在交流驱动器、工业电机控制、一些先进的电器和汽车领域拥有强大的背景。这种专业知识一直是先决条件,因为算法和控制器调整很难在真实世界条件下的真实环境中工作。
InstaSPIN-FOC 是一种在 EV 及其他领域扩大无传感器 FOC 采用的独特方法。这采用了一种创新的自调整算法,可立即为任何三相电机提供强大的无传感器 FOC。
这种电机控制技术使 EV 设计人员——即使是那些电机控制经验有限的设计人员——能够在他们的 EV 应用中识别、调整和完全控制任何类型的三相、变速、无传感器、同步或异步电机控制系统。分钟。
结论
EV 的主推进电机与各种辅助电机相辅相成,这些辅助电机需要高效、低成本、小尺寸的驱动方案,并注重可靠性、噪音和精度。这推动了高级算法的发展,以克服经典 BLDC 电机的一些限制。因此,无传感器 FOC 正在成为满足 EV 电机驱动要求的解决方案,但它需要很容易被仍然从皮带或液压驱动系统转移的供应商所适应。
审核编辑:汤梓红
-
汽车音响系统组件2018-09-13 2389
-
Eesof EDA先进设计系统选择能实现您梦想的设计2019-09-17 917
-
如何为未来的系统选择最好的本地数据存储?2021-05-17 1553
-
基于直线电机组件及完整的工程定位系统2021-09-01 1336
-
风电机组变流器测试应用2023-12-13 1543
-
为系统选择极佳的缓冲器与ADC组合2009-05-06 526
-
如何为系统选择最好的缓冲器与ADC组合2009-05-08 493
-
如何为通信电源系统选择整流模块2009-07-18 2658
-
MAX410 为系统选择极佳的缓冲器与ADC组合2016-08-18 1037
-
上游风电机组偏航控制的尾流中心偏移量系统研究2018-02-05 1119
-
固态IC是汽车电机控制应用的最佳选择2018-03-04 7428
-
风电机组机会检修模型2018-03-13 1168
-
风电机组变桨系统的形式_风电机组变桨系统原理与维护2018-06-04 37553
-
如何为您的高压系统选择合适的电流检测技术?2022-10-31 715
-
仓储物流电子看板系统选择2023-02-18 1809
全部0条评论

快来发表一下你的评论吧 !
