

基于微控制器上实现每赫兹的伏特控制技术
控制/MCU
描述
到 2035 年,全球每年将消耗超过 35 万亿千瓦时的电力,高于 2015 年的不到 21 万亿千瓦时。如今,工业生产中使用的电机所需电能的近三分之一。其中许多电机基于简单的交流设计,因为它们成本相对较低且易于驱动。它们在能源使用方面也非常低效,特别是在低速时。然而,这样的交流电机并不是天生的浪费。通过正确的电子控制形式,它们的效率可以显着提高。使用当今可用的控制技术,可以将给定工作水平的能耗降低多达 60%。
今天使用的最简单的控制技术是每赫兹的伏特。它在概念上既简单又易于在基本的微控制器上实现。核心算法利用了交流电机设计的核心特性。每个电机都有一个特征磁化电流和产生的最大磁通和转矩。这些特性与每赫兹的伏特比有关。电机通过围绕转动机械负载的移动转子布置的定子线圈的切换来转动。在线圈之间切换会迫使转子的磁化元件同步转动,以移动到磁场保持平衡的稳定状态。
线圈切换频率的增加反过来会增加速度。但是,如果供应的电能没有相应增加,则施加的扭矩会下降。每赫兹电压控制提供了一种解决问题的简单方法,方法是随着频率的升高增加线路电压,从而可以将扭矩保持在恒定水平。不幸的是,这种关系在低速时并不是特别一致。需要更高的电压才能在低速下保持高扭矩,但效率会下降并增加线圈饱和和过热的可能性。
磁场定向控制提供了一种优化电机控制的方法,特别是在低速时,还提供了使电机定位控制更加精确的能力。这增加了交流电机的整体应用范围,有助于降低工业机械的成本以及运营成本。
在磁场定向或磁通矢量控制中,伏特每赫兹控制所暗示的速度和转矩之间的联系被打破。磁场定向控制的概念可以使用绕组直流电机模型来表达,其中提供给定子和转子的电流是独立的。在这个模型中,产生的转矩和磁通可以独立控制。电机组内由电流产生的磁场强度决定了磁通量。提供给转子中电磁绕组的电流控制着转矩——因为磁场试图将自己调整到稳定状态。
直流电机在转子上使用换向器,该换向器执行控制定子上的哪些线圈随时通电的工作。换向器的设计使得电流切换到机械对齐的绕组,以在该点产生最大扭矩。因此,绕组的管理方式使磁通量发生变化,以保持转子绕组与定子中产生的磁场正交。
在交流电机中,只有定子电流受到直接控制。转子通常使用永磁体来提供其磁场。这意味着磁通和转矩依赖于相同的电流。但是面向场的控制提供了几乎独立地操纵它们的能力。在实践中,定子磁通是动态控制的,以提供独立操纵转矩的能力。通常,可以驱动定子线圈,以便它们产生扭矩或沿定子轴施加力,这种模式不影响旋转。这些方向分别是正交轴和直轴。为了传递运动,每个线圈依次被驱动以产生高正交力。
几种数学变换用于提供电流和电压变化的能力,以解耦扭矩和磁通量。在磁场定向控制下,流过定子不同部分的电流由一个矢量表示。矩阵投影将三相时间和速度相关系统转换为两坐标时不变系统。坐标通常使用符号d和q来描述,它们分别代表通量和转矩分量。在 (d,q) 参考系中,施加的扭矩与扭矩分量呈线性关系。
在磁场定向控制下,从电机接收电信号并结合到 (d,q) 坐标模型中。该模型通常是相对于转子计算的,从而更容易计算所需的通量。用于计算的典型方法是配对 Clarke 和 Park 变换。
Clarke 变换从不同相位(通常是三个相位)获取电流,并使用它们在笛卡尔坐标系中估计电流。这些系统的轴使用符号 alpha 和 beta 而不是传统的 x 和 y,以减少与空间坐标系混淆的可能性。然后将这些应用于 Park 变换,以提供在旋转 (d,q) 坐标系中看到的当前向量。三角函数提供了转换的核心,需要使用微控制器或数字信号处理器 (DSP)。
通过 Clarke 和 Park 变换,(d,q) 空间中电流矢量的磁通和转矩分量是从馈入每个电相的电流和转子磁通位置导出的,在大多数描述中采用符号 theta算法。这种结构适用于一系列电机。逆帕克变换用于产生电压输出,然后将其用于控制三相中每一相的功率的算法中。整体结构如图1所示。
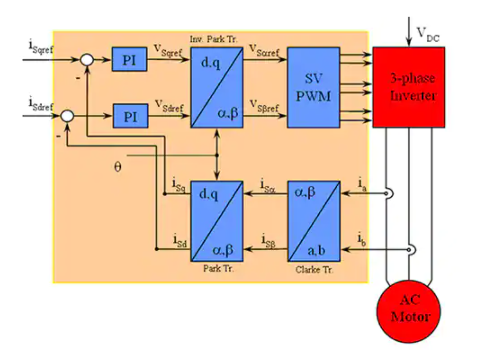
图 1:用于磁场定向控制的变换和控制块的基本配置。
通过简单地改变磁通参考并获得转子磁通位置,可以使用相同的核心结构来控制同步电机和感应电机。在同步永磁电机中,转子磁通是固定的,因为它由永磁体决定。感应电机需要产生转子磁通才能运行,因此这将作为非零值并入磁通参考中。
磁场定向控制成功的关键是转子磁通位置的实时预测。这种控制策略有一个复杂性。在交流感应电机内部,转子的速度与驱动它的磁通量旋转的速度不匹配。转子往往滞后,导致称为滑差速度的差异。在旧方案中,电机制造商使用传感器来分析转子位置,但这会导致不必要的额外成本。在实践中,可以使用来自电机内产生的电压和电流的反馈来补偿滑差。
许多系统使用测量的反电动势来估计转子滑差。反电动势电压的大小与转子的速度成正比。但是,使用该输入直接在低速或静止时会导致问题,并且不容易估计初始位置。从未知的转子位置启动可能会导致电机意外反转一小段距离或完全启动失败。简单地对反电动势进行采样的另一个缺点是它对定子电阻的敏感性,定子电阻容易随温度变化。
基于间接模型的方案提供了更好的性能。计算开销和性能之间存在很大的权衡,但总的来说,通过使用更复杂的基于模型的算法可以提高效率,尤其是在低速时。基于模型的间接方案根据可用的传感器读数估计这些的实时值。
与反电动势估计一样,核心问题是确定电机的起点。一种解决方案是从初始状态的估计开始,从该初始状态可以推导出预测输出的向量,并将其与测量的输出向量进行比较。该差异用于校正模型的内部状态向量。但是,噪声会破坏模型的稳定性。
扩展卡尔曼滤波器可以补偿噪声和突发干扰的影响。卡尔曼滤波器的架构允许被认为具有较低不确定性的更新被赋予比估计具有更大不确定性的更新更高的权重。过滤器以递归方式工作,因此每次估计只需要一组新读数和过滤器的先前状态即可生成新状态。
卡尔曼滤波器采用两个主要阶段:预测和更新。在预测阶段,滤波器根据前一个状态计算系统的下一个状态,在运动算法的情况下,它提供最后已知的速度和加速度值。由此,过滤器计算当前位置的预测。
在更新阶段,将新采样的电压和电流值与其预测值进行比较。输入数据与预测越接近,错误概率越低。这个错误概率反馈到卡尔曼滤波器增益中。在算法级别,卡尔曼滤波器依赖于许多矩阵乘法和求逆。因此,在电机控制中实现扩展卡尔曼滤波器的关键是高算术性能,与磁场定向控制的其他方面相同。
为了在实时电机控制情况下实现每秒所需的许多算术运算,需要高性能的 MCU 或 DSP。德州仪器 ( Texas Instruments ) 生产的TMS320F2833x 系列器件旨在处理交流电机应用的典型计算负载,并由各种片上外围设备支持,以帮助与电源转换电子设备集成。
TMS320F2833x 围绕具有浮点支持的高性能 32 位 CPU 构建,符合 IEEE754 单精度算术标准。通过实施符合 IEEE 标准的浮点单元,TMS320F2833x 简化了算法开发,因为它可以处理非常宽的数字范围,并内置支持非数字 (NaN) 和除零条件等错误。与双 16 x 16 乘加 (MAC) 单元耦合的哈佛架构为基于矩阵和投影的运算提供了高吞吐量。为了提高精度,这些单元可以连接在一起以执行 32 x 32 MAC。片上外设包括一个 16 通道模数转换器 (ADC),用于对来自电机的电压和电流反馈信号进行采样。
作为 C2000 系列 DSP 增强型 MCU 的成员,TMS320F2833x 得到 TI 数字电机控制库的支持,该库提供可重复使用的可配置软件块来实施各种控制策略。该库由表示为块的函数组成,除了用于闭环操作的控制块和用于脉冲宽度调制 (PWM) 等功能的外围驱动程序之外,这些函数还提供 Clarke 和 Park 等变换。
在电机控制情况下,PWM 输出控制六个功率晶体管,它们共同向三个电气相位提供电压和电流。每个相位都使用半桥晶体管配置。在这些情况下用于控制的常用算法是空间矢量 PWM。与更简单的 PWM 技术相比,这减少了谐波,并采用了八种开关状态。有六个活动状态和两个零状态,每个状态都是八个对应空间向量的目标状态。这些状态以这样一种方式排列,即两组互补状态在任何时候都处于活动状态。一组用于三个高侧功率晶体管,另一组用于低侧。该算法循环通过状态以根据磁场定向控制模型的要求将电源切换到状态。TMS320F2833x 包括适用于采用空间矢量开关的软件控制的 PWM 硬件。总共 18 个 PWM 输出中有 6 个支持高精度控制,分辨率为 150 ps。结果是一个数字控制器,需要相对较少的外部硬件来管理功率晶体管,如图 2 所示。
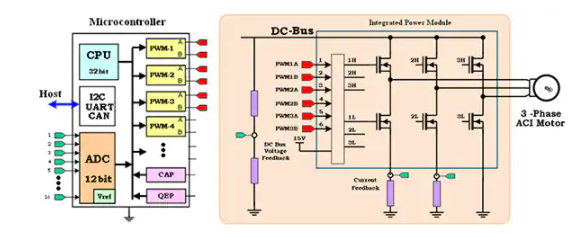
图 2:框图,显示了 F2833x 的 PWM 输出对电源相位的控制。
结论
利用具有必要核心和高性能构建块的微控制器,结合 TI 数字电机控制库,设计人员可以驱动新一代高效交流电机。
-
【微控制器基础】——从历史切入,了解微控制器的五个要素(上)2023-12-07 1608
-
【微控制器基础】——电路中的“数字与逻辑”(上)2023-10-26 1628
-
【微控制器基础】——完美的软硬结合(上)2023-10-17 1309
-
电梯的基础原理:微控制器jf_10480160 2022-12-14
-
STM32微控制器上的Octo-SPI接口2022-11-21 1992
-
8051微控制器的基础知识2022-09-12 4448
-
五种降低微控制器能耗的技术2022-07-21 2293
-
使用MCU微控制器实现对物联网设备的控制2021-11-01 1613
-
STM32微控制器2021-07-23 2097
-
什么是微控制器?如何编程微控制器?2020-08-21 13421
-
如何实现用AVR微控制器控制音乐播放?2018-07-10 3560
-
基于FatFs在32位微控制器STM32上的移植2017-09-26 1359
-
每两台新车就有一台内含英飞凌微控制器2012-11-22 759
-
针对微控制器应用的FPGA的实现2012-08-20 2563
全部0条评论

快来发表一下你的评论吧 !
