

四大家族在协作工业机器人上的布局
描述
星火燎原
相信大家也看到了前段时间节卡机器人D轮融资的新闻了,10亿元的融资额让人产生互联网企业融资的错觉。大写的服!不久前我才刚有机会近距离体验了一下节卡协作机器人,性能方面先按下不说,在制造环节,我认为节卡做得还是相当不错的,主要体现在铸件油漆的处理、铸件与外壳之间的段差处理等。
特地翻了一下以前的文章,我写的第一篇关于协作机器人的文章是《Rthink倒下了,协作还能撑多久?》。时间回到2018年,协作机器人的明星企业兼鼻祖突然宣布倒闭,给当时方兴未艾的协作机器人市场当头一棒,包括我在内的许多人都对“人机协作”持悲观态度。
而这几年协作机器人的风风火火确实感觉被打了半边脸。
为什么说是半边脸呢?因为没有想到协作机器人会在这么短时间内火到如今这个程度,一方面是资本对机器人的投资热度前所未有,另一方面是关节模组的技术突破速度前所未有。
所以右脸打得疼,还好左脸保住了,因为“人机协作”目前的状态还是停留在有人、有机、没有协作的状态。
之前我也多次提到,“协作机器人”的轻量化才是比较实用的点。经过几年的摸索,如今协作机器人确实以轻量化、安全性高(相对工业机器人)、易部署、易使用等特点在工业化场景中占得一席之地。
高工机器人产业研究所(GGII)发布的最新数据显示,2022年上半年,整体消费需求虽疲软,中国市场工业机器人销量同比仍增长3.78%,其中协作机器人和中大负载六轴机器人增速领跑,分别为20.05%和15.11%,小六轴机器人同比下滑6.27%,SCARA机器人同比增长3.45%,并联机器人同比下滑5.53%。
协作机器人经过多方试探最终在工业上发力并且会持续抢占工业机器人的市场,这个趋势是明显的。
就在不久前,UR在发布UR20的时候,也旗帜鲜明地喊出了“工业协作机器人”的口号,我的理解是“应用于工业场景的协作机器人”或者“工业型协作机人”。
面对协作机器人从早期Rethink和UR的星星之火到现在的燎原之势,工业机器人头部厂家自然是如坐针毡,或自研,或投资、或收购,反正是陆续推出了自家的协作机器人。
比较可惜也比较有意思的是,协作机器人的开拓者、头部企业,无一例都不是工业机器人企业,特别是作为工业机器人四大家族的FANUC、KUKA、ABB、YASKAWA,在协作市场上居然也都是滞后的。多少有点“创新者的窘境”的感觉。
注意这里指的是市场上滞后,并非技术,KUKA的iiwa、ABB的Yumi都发布得挺早,而且性能都非常优异,是绝对的性能顶流,但最终协作机器人市场还是被以UR为代表的关节模组厂家所占领。
更有意思的是,在协作机器人打出“工业协作机器人”抢占工业机器人市场的时候,四大家似乎正在用“协作工业机器人”予以反击。
“协作工业机器人”这个词是我杜撰的,并没有哪一家提出过这样的名词,只是我从四大家的协作产品布局中似乎看到了这样的影子。所以今天我们来聊一聊四大家族在协作工业机器人上的布局。
文中观点仅是个人观察与分享,予尝为女妄言之,女以妄听之。
YASKAWA
协作机器人早期还经常伴随着七轴的冗余控制,要说七轴机器人,安川很早就有了SIA5D,而且还有双臂,那都不是事儿。
但是在协作机器人的产品化上确实慢了半拍,直到后来才推出了10kg负载的协作机器人HC10,再后来陆续推出了HC20,HC30。特别是HC30,30kg/1700mm的规格在协作机器人中比较显眼,也就是说,在协作机器人上,安川没跟上起步,但是在协作机器人越做越大的趋势上,安川算是弯道超车了。
从安川协作机器人的外观来看,是有比较明显的“协作机器人特征”的,比如中空走线,末端有灯、有按钮,功能上协作机器人典型功能该有的都有。
但是技术路线上就不一样了,HC系列用的是YRC1000电控柜,不差钱的话也可以选择YRC1000micro的紧凑版。一看YRC1000电控柜的样子跟示教器就可以知道,就是一个工业机器人的配置。而且安川是把协作机器人归类为Smart Series Robots,不知道翻译为“智能机器人系列”是否合适,毕竟“智能”这个词有点大,姑且这么叫吧,智能系列还特别强调具备100%的工业机器人功能,而且也强调了PLd Cat .3的安全等级以及25项安全功能。
到这就很明显了,安川的产品定义是兼顾协作安全功能与工业机器人性能的机器人,所以我将之命名为“协作工业机器人”,即协作型的工业机器人。
可能有人说了,使用工业机器人的电控柜怎么就一定是工业机器人了呢?
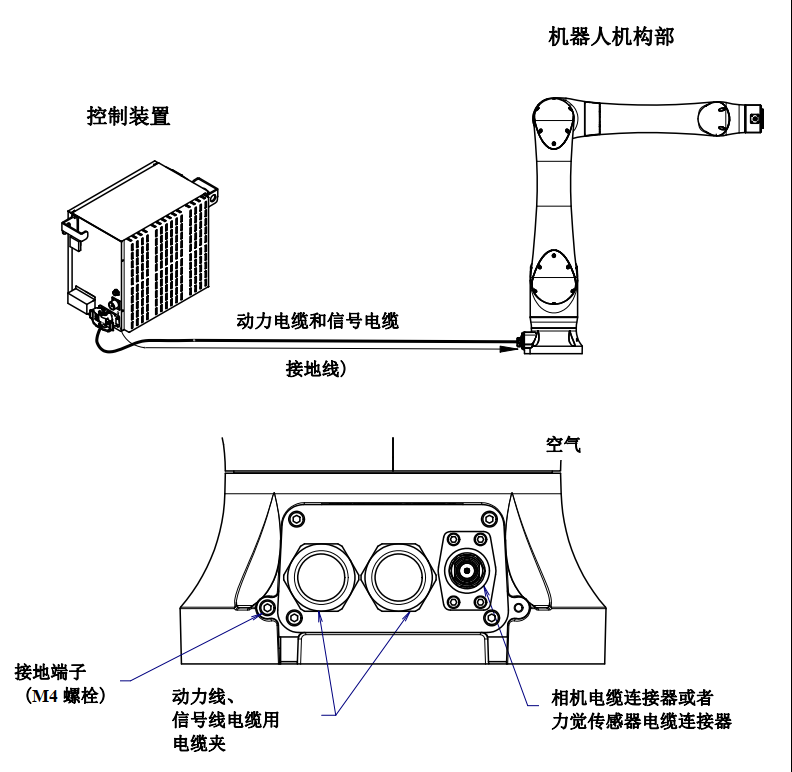
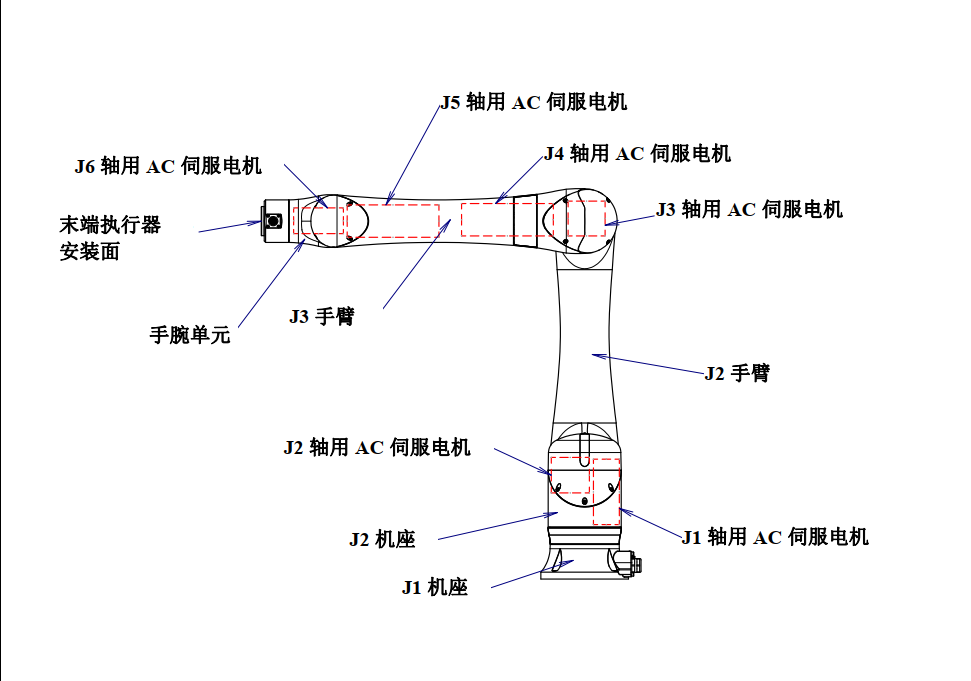
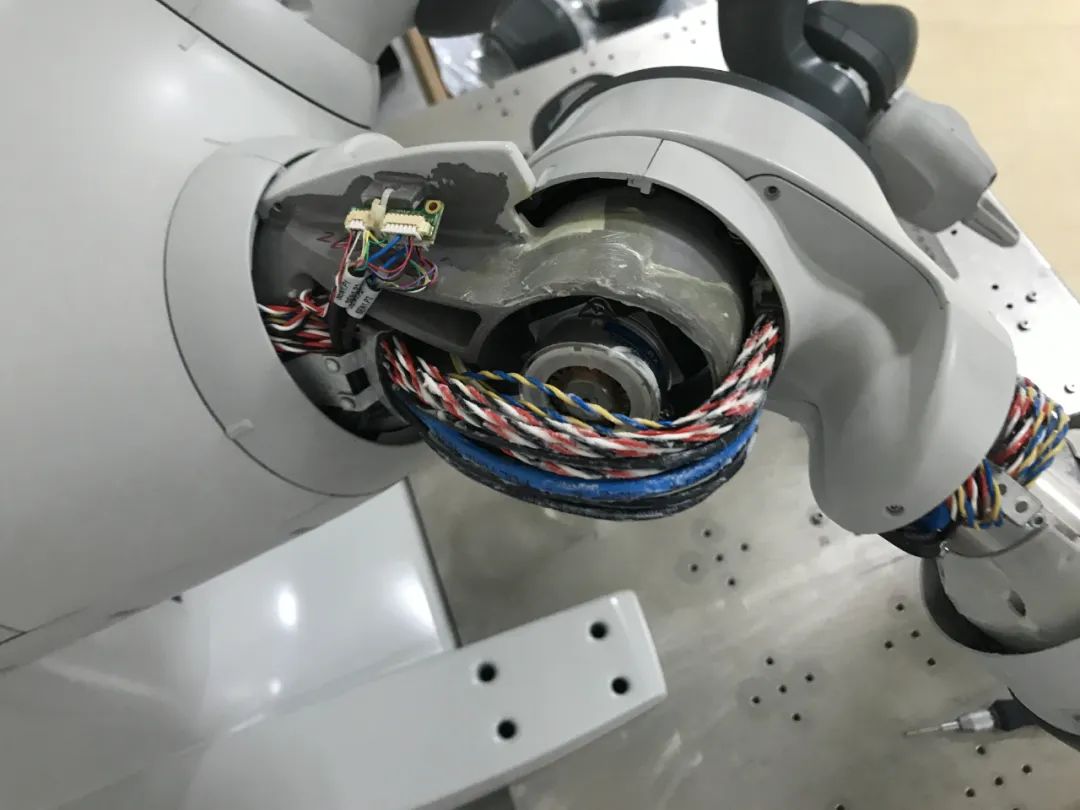
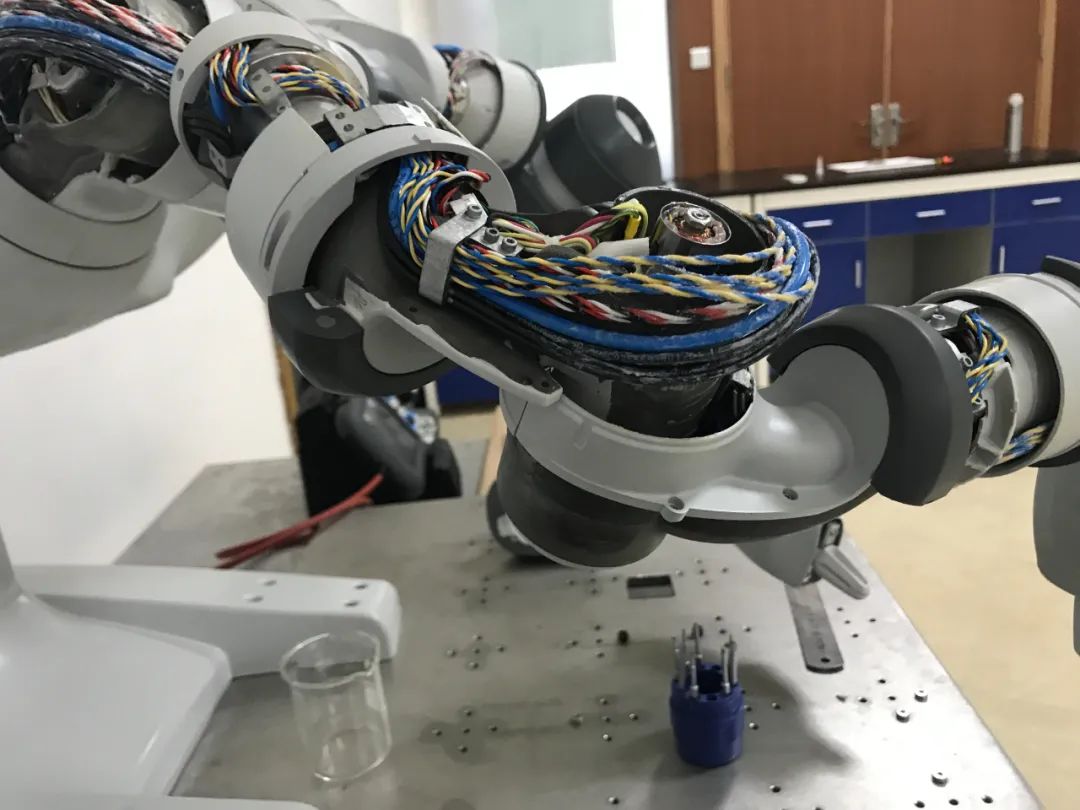
别着急,机器人界的网红为我们揭晓答案。很多业内的朋友应该都知道这位机器人界的最佳抖音网红,没有之一,曾经很土豪地拆了一台安川的HC10。详细视频我就不放了,各位有兴趣的上抖音搜一下。我给大家展示几个图片,行业朋友一看就明白了,视频截图,画质比较感人,将就着看吧。



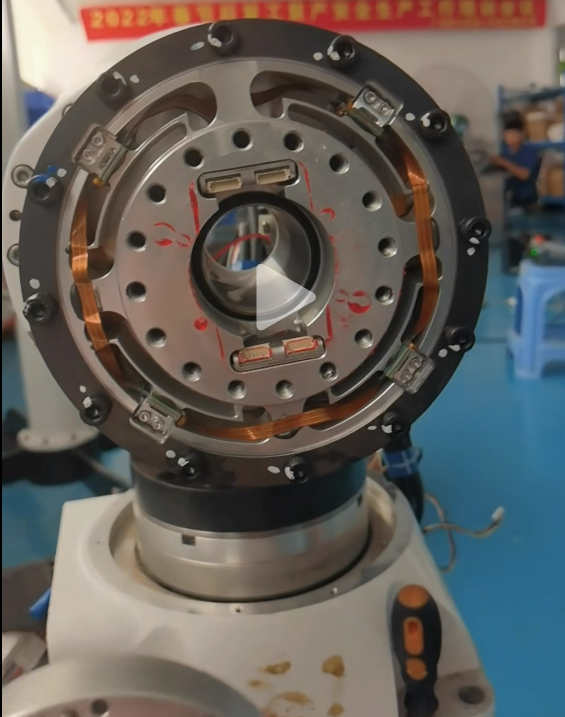
视频中可以看到,这就是一个加了力传感器的工业机器人,用的就是工业机器人的伺服电机,只不过电机做了偏置以便于中空走线。所有线缆都汇聚到基座上,非常紧凑,这些设计对于线缆的柔性要求非常高,寿命跟维护都是比较担心的问题。
这里我们就不详细剖析结构了,简单看个大概就行,也不是什么机密,要再细致研究就真得买一台才能研究明白。总结起来安川的协作机器人就是工业伺服电机加中空减速机加力传感器,非模块化设计,驱动集中在控制柜中。
FANUC
第二个说FANUC是因为跟安川比较相似,而且也是赶紧上了“大负载协作”的车,后来还推出了25kg负载的。
早前还有在工业机器人基座上加力传感器的,最大做到了35kg,还带了防护皮肤。这个就更不用说了,就是完完全全的工业机器人加上一些安全功能来达到协作机器人的标准。
各位,你可以说他不够灵敏,可以说他长得不像协作,但是不能质疑他不是协作,因为人家也是实实在在有安全功能的。再说了,从来说没有谁定义长得像UR的才是协作,长得像协作的也没有哪家能做到人机协同作业,切勿相马失之瘦,相士失之贫!

回到CRX系列,跟安川一样,也是伺服电机加减速机加力传感器的设计方法,基座也跟工业机器人一样有动力线跟编码器线,连着工业机器人的电控柜。而且仔细看会发现FANUC更复杂,不旦中空偏置,还有直角传动的,所以如果不是知道里面的结构,CRX看起来确实像常见协作一样瘦。就是这么复杂的设计,价格方面我相信也是比较复杂的~~~~~
所以不管是先应急的CR系列,还是现在陆续发布的CRX系列,我们也可以看到,“协作工业”的路线是比较明显的。
KUKA
KUKA的协作机器人就不用多说了,大家都知道iiwa是协作机器人产品的天花板,国内几家带力传感器的协作厂家都跟iiwa有千丝万缕的关系(更准确一点说是跟德宇)。当然价格上也是顶流,这也直接影响了iiwa的销量。据说iiwa的销量主要来自于医疗、学校、科研机构,还有竞争对手~~~~~
要说销量,iiwa在协作机器人中实在不值一提,但在高端应用特别是医疗应用中,iiwa还是一座难以逾越的高山。就这么说吧,当前国产骨科跟穿刺手术机器人如日中天,但绝大多数都是辅助,也就是机器人只是辅助定位,而iiwa却可以自主穿刺,你就想想这里的差距有多大。毕竟iiwa有多年的积累,国产才刚起步,慢慢来吧。
关于iiwa就不废话了,大家都很熟悉,技术路线跟一般协作机器人相似,无框电机加谐波加力传感器,驱动器分布在本体内。
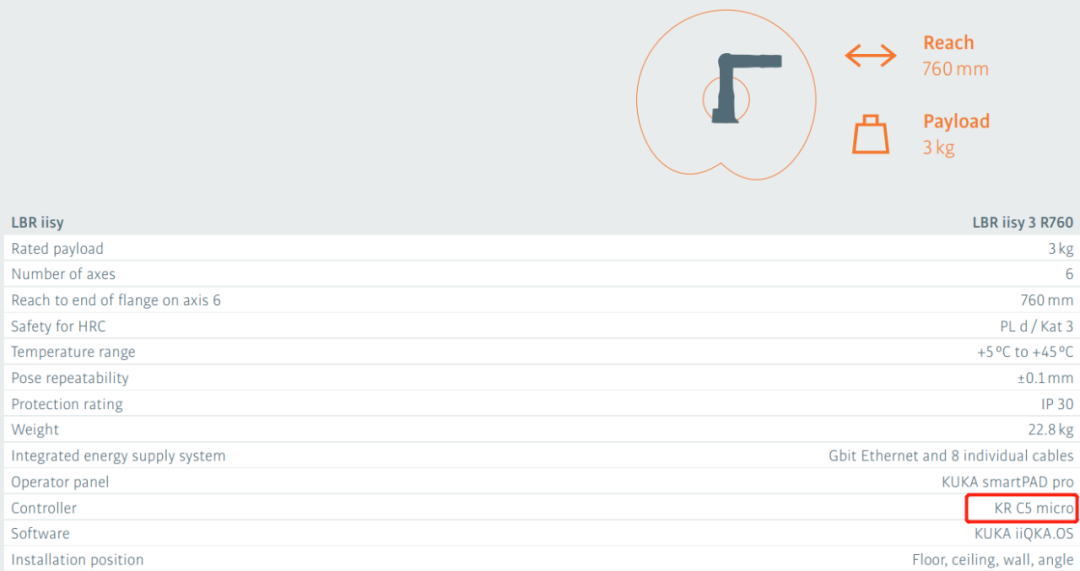
大概是由于iiwa实在太高端(贵),KUKA后来又推出了iisy系列,已发布的有iisy3 ,而在2022年慕尼黑自动化展中,KUKA又表示将推出iisy11 跟iisy15。
目前关于iisy的资料还是非常少,所以外界并不是特别清楚到底内部结构是怎样的,但我们还是可以从有限的资料中发现蛛丝马迹。首先宣传上是已经直接点明了iisy就为工业而生的,另外一个细节就是使用的控制柜是KR C5 micro,也是工业机器人的柜子。

好了,就目前的产品来看,KUKA是两手抓两手都要硬,低压分布式、高压集中式都有,不同的协作机器人对应不同的场景,而不在一个技术路线上押宝,同时布局了工业协作与协作工业。
ABB
如果说KUKA是两手抓两手都要硬,那ABB就是——我~~全~~都~~要!!!!
首先是Yumi,也是传统的电机减速机直连,线缆全部归整到基座的路线。先是双臂,又发布了单臂,技术上Yumi也绝对是顶流,工业设计也非常漂亮。
而且Yumi没有中空走线,而是外部走线。各位有兴趣的也请去翻翻老陈网红的视频,目前我知道的好像也就他把Yumi拆了又分享了视频。壕~~~~~细节就不解析了(其实是解析不了),各位自己看看照片体会吧。


而后ABB通过收购发布了Roberta,不过后来消失了,去年又同时发布了CRB1100跟CRB 15000。
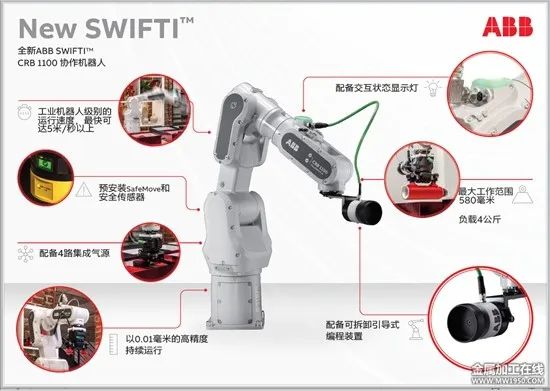

CRB 15000就是GoFa,走的也是低压模块化关节模组的技术路线,而且GoFa的模组设计有不少亮点,有不少有意思的设计。这个就等哪位土豪大神拆机揭密吧。
而CRB 1100 完全是在工业机器人上加上激光雷达等做的安全策略,在同等规格的工业机器人里是最安全的,在同等规格的协作机器人里是性能最好的,当时看到这个产品思路我是眼前一亮,兼顾了工业的速度与协作的安全,完美~~~~
所以ABB是每个技术路线都布局,有钱真好~~~~
总结
我们回过头来捋一捋,UR是借由“人机协作”的概念一飞冲天,又凭借“工业协作”的思路平稳落地,坐上了协作的第一把交椅(虽然去年已易主,但没事,今年鹿死谁手还不好说);而YASKAWA跟FANUC这两个日系龙头则坚定不移地采用工业机器人的思路设计协作,简单来说,工业机器人加上力传感器就是协作了;而KUKA跟ABB则是投赛道,特别是ABB,几乎整个赛道都包了,并且肯定后续还有新品,因为大负载协作还没做呢。
也就是说四大家族都齐刷刷将“协作工业”作为自己的唯一或其中一条路线。
虽然目前“工业协作”在市场上占据压倒性优势,但是乾坤未定,一切还尚早。四大家族走“协作路线”,我觉得一方面可能是有意做技术路线的区分,另一方面大家对于协作性能要求越来越往工业机器人靠近也有目共睹。
而且我自己比较认同的趋势也是未来工业跟协作的界限会越来越模糊,或者说最终所有种类的机器人都会越来越安全。(我这还没有说电子皮肤的一脉,从安全的角度来说,工业机器人电子皮肤,一样可以拖拽示教跟碰撞检测,特别是如果加的非接触式电子皮肤,安全系数就更高了。还有加相机监测,比如特斯拉的自动驾驶技术,其实是相通的,但本文我稍微聚集了一下。)
试想一下,力传感器的原理是通过检测薄壁变形量来转换成力反馈信号,“薄壁”“变形”,这不就是谐波减速机里的柔轮的基本特征么?如果有一天,把力传感器做到了柔轮上,所有用谐波减速机的工业机器人不就突破了协作的界限了么?反过来如果低压电机过几年又得到了突破,性能比肩高压伺服,不也打破了协作速度慢精度低的诅咒了么?
不管是工业协作,还是协作工业,我认为最终还是要会师的,殊途同归,只是看看会师时谁的部队更庞大。正所谓
审核编辑 :李倩
-
我这里有机器人四大家族的行业资料,等你免费来领取!2017-11-13 5392
-
机器人四大家族抢滩中国市场 地方***重点发力2018-11-21 2522
-
那些不输“四大家族”的高端机器人公司2016-11-28 3828
-
你知道ABB、库卡等机器人四大家族的的优劣势吗?2017-04-05 28208
-
国产机器人产业亟待突围 如何打破国际“四大家族”是关键2018-02-01 3681
-
深度解析全球机器人四大家族现状2018-06-22 12905
-
国产工业机器人跟“四大家族”比为何还有如此大的差异2018-07-03 2607
-
机器人“四大家族”逐鹿广东2018-07-13 3496
-
工业机器人四大家族评测,到底孰优孰劣?2018-08-28 10097
-
四大家族垄断全球工业机器人市场2018-09-03 5138
-
工业机器人四大家族的形式比拼2018-10-26 8524
-
四大家族如何垄断全球工业机器人市场2018-11-14 3908
-
工业机器人四大家族各自都有哪些优劣势2019-01-15 15988
-
国内工业机器人和四大家族的差距还有多大2019-03-23 7325
-
工业机器人四大家族各自的竞争力是什么2019-08-16 2792
全部0条评论

快来发表一下你的评论吧 !
