

电动滑板车电机驱动系统方案
工业控制
描述
前言
疫情爆发后,出行成为日常生活的关键,随着时间的推移,疫情向世界蔓延以及逐步得到控制,现在出现了令人瞩目的产业。为了减少公共交通所造成的感染风险,各国向人们提供旅游补贴,提倡绿色旅游,中国对欧洲的自行车和电动滑板车出口猛增。中国有一个完整的产业链,从零部件到整车装配。中国出口的自行车占世界市场份额的70%以上。
Precedence research数据显示,2021年全球电动自行车市场规模为175.6亿美元,预计到2030年将超过409.8亿美元,预计从2021年到2030年将以9.6%的复合年增长率 (CAGR) 增长。
电动自行车兴盛,但相比之下,电动滑板车的结构更简单,骑行姿势更适合着装更正式的欧美通勤族,站上就能走的电滑板车显然比两腿蹬轮方便得多。
GlobeNewswire预测,在各国政府节能减排的支持性政策推动下,到2028年,全球电动滑板车市场总额预计将达到299亿美元。而2021年其全球市场价值为196亿美元;预计市场将以7.3%的复合年增长率增长。
这两轮市场的供求情况稳定,一些品牌已飙升逾300%。与国外政府补贴引发的自行车热潮不同,自2021年4月份以来,国内两轮汽车市场一直在缓慢升温,儿童滑板车与自行车的销量最高,几乎是爆发前的两倍。
电动滑板车电机驱动系统方案
目前,90%以上的电动滑板车都是采用的轮毂电机,如何低噪音,高效率地驱动轮毂电机成为电动滑板车驱动器的关键。
采用正弦波FOC控制,基于GD32E230C8T6主控芯片和GD30DR8306KU驱动芯片是24V滑板车系统性价比极高的方案,其中GD32E230C8T6提供电机驱动的MCU平台,而GD30DR8306驱动芯片,集成了电机驱动,保护,LDO以及BUCK等多种功能,二者合一后,只需要增加极少的外围电路,便可以实现滑板车轮毂电机的驱动。
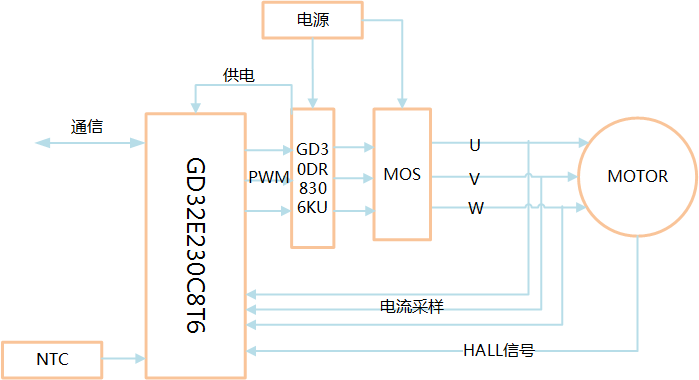
电动滑板车系统方案框图
本系统采用24V锂电池供电,通过GD30DR8306自带的DC-DC电源转换芯片,提供5V的电压信号为系统供电,同时GD30DR8306提供mos的门级驱动。本系统通过HALL传感器采集到的信号获得轮毂电机的相位和位置信息,以及通过低侧电流采样获得电流大小,在GD32E230C8T6上进行有感FOC电流+速度双闭环控制,使得系统噪音更小,效率更好,系统平滑性更好。
GD32E230系列MCU主要规格介绍
∎ Arm Cortex-M23@72MHz, 处理性能可达55DMIPS
∎ Flash:64KB/32KB/16KB
∎ SRAM:8KB/6KB/4KB
∎ 高速高精度ADC, 12Bits ADCx1@2.6Msps,10通道
∎ 高级定时器x1,可产生6路死区可调的互补PWM输出
∎ 通用定时器x5
∎ Flash带硬件加密保护
∎ 多种串行通讯方式:I2Cx2, SPIx2, UARTx2
∎ 丰富的封装类型:TSSOP20/LGA20/QFN28/ QFN32/LQFP32/LQFP48
∎ 供电电压:1.8V~3.6V
∎ 工业级的工作温度范围:-40℃~+85℃
∎ 工业级的ESD特性:6000 V
GD30DR8306系列驱动芯片介绍
∎ 三相无刷电机驱动
∎ 4.5V-30V供电电压
∎ 可编程驱动电流,最大1A的拉电流和1.2A的灌电流
∎ 200kHz PWM 输入控制
∎ 2种PWM 模式 (6x 和 3x)
∎ 内置 5V/2A DC-DC 降压控制器
∎ 集成 5V LDO
核心控制原理介绍
本系统方案采用有感FOC控制理论
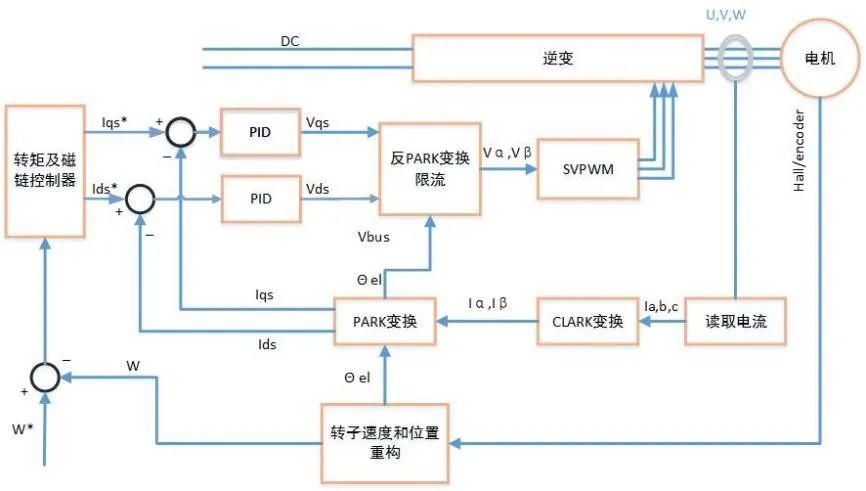
有感FOC控制算法框图
FOC控制理论最初于上世纪70年代由西门子的工程师提出。可以把定子所产生的磁场虚拟成一个绕转子高速旋转磁铁。定子磁势可分解为d轴磁势和q轴磁势,d轴磁势与转子磁势同轴,不能产生切向的力矩,但会影响永磁同步电机转子永磁体所产生的磁场;q轴与转子磁势相差90度,因而产生切向的力矩(类似两根垂直的条形磁铁所产生的相互作用力)。
FOC的控制的基本思路就是将三相静止ABC坐标系下的相关变量转换到旋转坐标系下(d,q)进行数学运算,controller改变d轴和q轴的电压达到控制d轴和q轴电流的目的。然而最终给电机三相的只能是静止坐标系下的电压,因此在控制算法中需要再次把dq轴的电压转换成ABC三相电压给驱动桥。
过程如下:
1、测量3相定子电流。这些测量可得到ia和ib的值,可以通过以下公式计算出ic:
ia+ib+ic=0
2、将3相电流变换至2轴系统。该变换将得到变量iα和iβ,它们是由测得的ia和ib以及计算出的ic值变换而来的。从定子角度来看,iα和iβ是相互正交的时变电流值。
3、按照控制环上一次迭代计算出的变换角,来旋转2轴系统使之与转子磁通对齐。iα和iβ变量经过该变换可得到Id和Iq。Id和Iq为变换到旋转坐标系下的正交电流。在稳态条件下,Id和Iq是常量。
4、误差信号由Id、Iq的实际值和各自的参考值进行比较而获得。
Id的参考值控制转子磁通
Iq的参考值控制电机的转矩输出
误差信号是到PI控制器的输入
控制器的输出为Vd和Vq,即要施加到电机上的电压矢量
5、估算出新的变换角,其中Vα、Vβ、iα和iβ是输入参数。新的角度可告知FOC算法下一个电压矢量在何处。
6、通过使用新的角度,可将PI控制器的Vd和Vq输出值逆变到静止参考坐标系。该计算将产生下一个正交电压值Vα和Vβ。
7、Vα和Vβ值经过逆变换得到3相值Va、Vb和Vc。该3相电压值可用来计算新的PWM占空比值,以生成所期望的电压矢量。
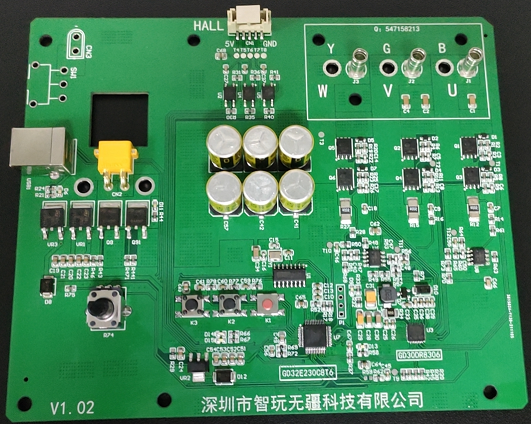
方案展示

审核编辑 :李倩
-
电动滑板车核心技术方案解析2025-08-22 1049
-
电动滑板车散热系统设计2025-07-01 2100
-
助力低碳出行 | 基于ACM32 MCU的电动滑板车方案2023-05-08 1411
-
MCU在电动滑板车中有何应用呢2022-02-10 1656
-
是什么让电动滑板车成为短程代步利器?2022-02-09 921
-
DIY电动滑板车的相关资料分享2021-12-03 1774
-
MCU在电动滑板车硬件实物的设计技巧分享2021-01-26 2019
-
常规的滑板车控制系统硬件设计方案2021-01-06 5515
-
MCU在电动滑板车硬件实物的设计技巧2020-12-28 3284
-
MCU微控制器在电动滑板车技术核心剖析2020-12-25 3556
-
电动滑板车电机控制器的作用是什么2020-06-12 7665
全部0条评论

快来发表一下你的评论吧 !
