

一文简析OpenCV中的直线拟合方法
描述
直线拟合原理
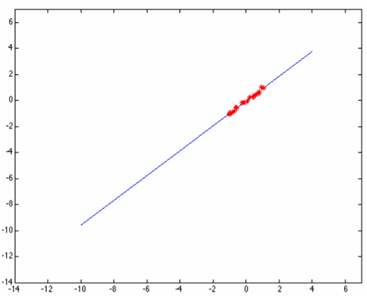
给出多个点,然后根据这些点拟合出一条直线,这个最常见的算法是多约束方程的最小二乘拟合,如下图所示:
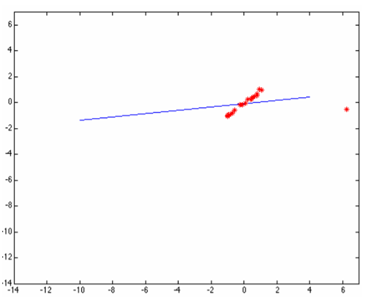
但是当这些点当中有一个或者几个离群点(outlier)时候,最小二乘拟合出来的直线就直接翻车成这样了:
原因是最小二乘无法在估算拟合的时候剔除或者降低离群点的影响,于是一个聪明的家伙出现了,提出了基于权重的最小二乘拟合估算方法,这样就避免了翻车。根据高斯分布,离群点权重应该尽可能的小,这样就可以降低它的影响,OpenCV中的直线拟合就是就权重最小二乘完成的,在生成权重时候OpenCV支持几种不同的距离计算方法,分别如下:
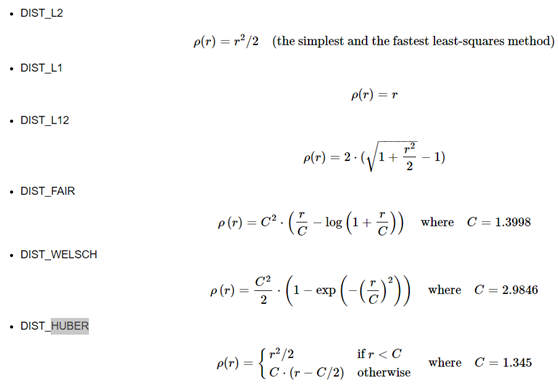
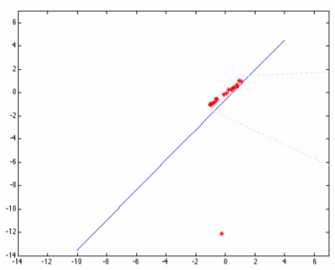
其中DIST_L2是最原始的最小二乘,最容易翻车的一种拟合方式,虽然速度快点。然后用基于权重的最小二乘估算拟合结果如下:
函数与实现源码分析
OpenCV中直线拟合函数支持上述六种距离计算方式,函数与参数解释如下:
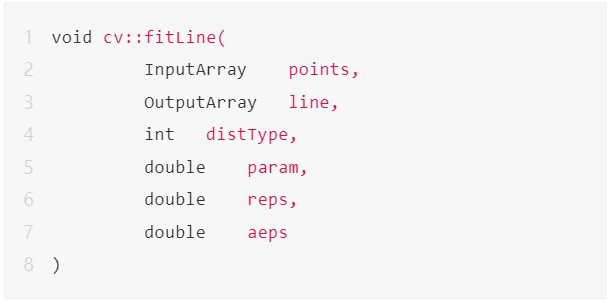
points是输入点集合
line是输出的拟合参数,支持2D与3D
distType是选择距离计算方式
param 是某些距离计算时生成权重需要的参数
reps 是前后两次原点到直线的距离差值,可以看成拟合精度高低
aeps是前后两次角度差值,表示的是拟合精度
六种权重的计算更新实现如下:
static void weightL1( float *d, int count, float *w )
{
int i;
for( i = 0; i < count; i++ )
{
double t = fabs( (double) d[i] );
w[i] = (float)(1. / MAX(t, eps));
}
}
static void weightL12( float *d, int count, float *w )
{
int i;
for( i = 0; i < count; i++ )
{
w[i] = 1.0f / (float) std::sqrt( 1 + (double) (d[i] * d[i] * 0.5) );
}
}
static void weightHuber( float *d, int count, float *w, float _c )
{
int i;
const float c = _c <= 0 ? 1.345f : _c;
for( i = 0; i < count; i++ )
{
if( d[i] < c )
w[i] = 1.0f;
else
w[i] = c/d[i];
}
}
static void weightFair( float *d, int count, float *w, float _c )
{
int i;
const float c = _c == 0 ? 1 / 1.3998f : 1 / _c;
for( i = 0; i < count; i++ )
{
w[i] = 1 / (1 + d[i] * c);
}
}
static void weightWelsch( float *d, int count, float *w, float _c )
{
int i;
const float c = _c == 0 ? 1 / 2.9846f : 1 / _c;
for( i = 0; i < count; i++ )
{
w[i] = (float) std::exp( -d[i] * d[i] * c * c );
}
}
拟合计算的代码实现:
static void fitLine2D_wods( const Point2f* points, int count, float *weights, float *line )
{
CV_Assert(count > 0);
double x = 0, y = 0, x2 = 0, y2 = 0, xy = 0, w = 0;
double dx2, dy2, dxy;
int i;
float t;
// Calculating the average of x and y...
if( weights == 0 )
{
for( i = 0; i < count; i += 1 )
{
x += points[i].x;
y += points[i].y;
x2 += points[i].x * points[i].x;
y2 += points[i].y * points[i].y;
xy += points[i].x * points[i].y;
}
w = (float) count;
}
else
{
for( i = 0; i < count; i += 1 )
{
x += weights[i] * points[i].x;
y += weights[i] * points[i].y;
x2 += weights[i] * points[i].x * points[i].x;
y2 += weights[i] * points[i].y * points[i].y;
xy += weights[i] * points[i].x * points[i].y;
w += weights[i];
}
}
x /= w;
y /= w;
x2 /= w;
y2 /= w;
xy /= w;
dx2 = x2 - x * x;
dy2 = y2 - y * y;
dxy = xy - x * y;
t = (float) atan2( 2 * dxy, dx2 - dy2 ) / 2;
line[0] = (float) cos( t );
line[1] = (float) sin( t );
line[2] = (float) x;
line[3] = (float) y;
}
案例:直线拟合
有如下的原图:
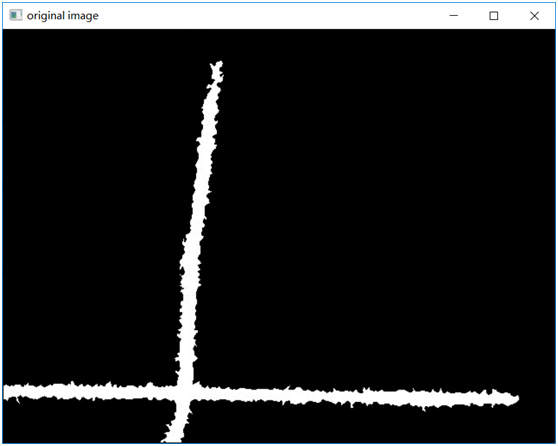
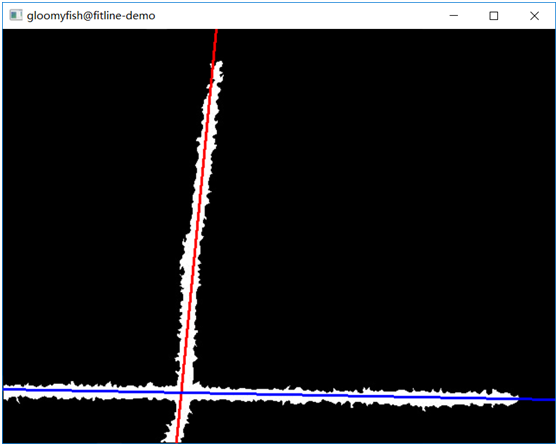
通过OpenCV的距离变换,骨架提取,然后再直线拟合,使用DIST_L1得到的结果如下:
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
matlab直线拟合案例的寻找2012-12-16 3094
-
【每周一练】拟合公式2013-12-24 14099
-
为什么用线性拟合出来的最佳线性拟合的的波形图与原来直线的斜率不一样?2016-06-07 7508
-
Labview线性拟合时如何指定最终拟合直线的斜率?2017-04-03 7681
-
ransac拟合直线和拟合平面2019-03-26 2148
-
使用MXNet拟合直线简洁实现2020-05-26 1097
-
练习一·使用MXNet拟合直线手动实现2020-06-10 930
-
直线拟合求解的推导过程2021-08-18 1983
-
OpenCV进行椭圆拟合的程序免费下载2019-10-12 1150
-
OpenCV中的直线拟合2022-08-26 4294
全部0条评论

快来发表一下你的评论吧 !
