

假负载控制电路的工作原理分析
描述
简单可靠的电路在实际应用中将会给我们带来更多的收获,本期就从一个简单的”假负载控制电路“讲起。
在输入电压范围比较宽的电路中,(比如Vin:9~36V,Vout:5V),根据所选择的拓扑结构,当输入电压为36V时,此时驱动信号占空比最小,为Dmin。当整个电路以Dmin工作时,会有丢波(驱动信号丢失一部分)现象,从而表现出输出纹波会有很大的振荡。为了解决这个问题,我们开发了上面的电路。
工作原理分析:
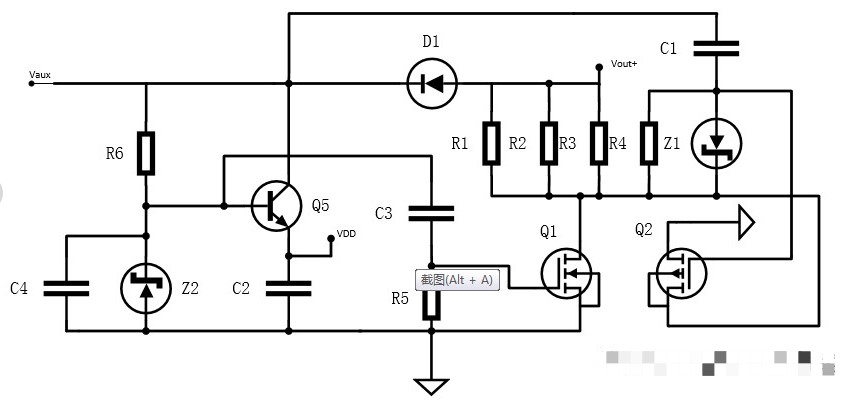
我们为了保障电路在初次上电(空载)就可以直接进入连续模式,那么就要控制假负载电路在上电时接入整个电路,充当负载的作用,此时驱动信号占空比就会展开,根据控制芯片的特性,驱动信号将一直工作在连续模式。
上电时,通过Vaux在Z2上产生一个稳定的电压Vref,这个电压加在C3上,此时的C3可以等效成一个阻值很大的电阻,R5相当于开路;Vref加在Q1的GS两端,Q1导通,假负载R1-R3接入电路,如果现在观察主回路MOS管的驱动波形,就会发现驱动波形会打开即占空比会加大,整个电路进入了连续模式。此时的C3通过R5对地形成回路,C3两端的电荷通过R5卸放掉,Q1开始关断。
电容C3两端的电压波形:
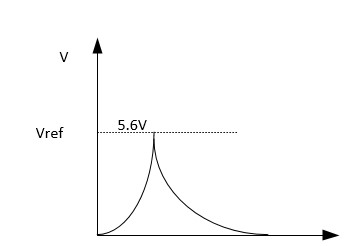
当C3存储的电荷通过R5完全放掉后,Q1完成关断,此时假负载与主回路断开,不再参与主回路工作;当电路进入连续工作模式后,就会一直保持这种工作状态。
当关机时,稳压管Z1阴极的电压将会从等电势Vout逐渐降低到零伏,由于Q2为P型MOS管,此时Q2导通,假负载会接入电路,防止关机时负载过轻产生很大的关机过冲。
稳压管Z1阳极侧的波形:
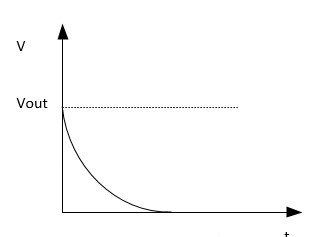
上面电路的优点:可以有效解决高压输入(以Dmin)工作时,驱动波形断续导致的输出振荡的问题;另外可以防止关机时轻载情况下产生很大关机过冲。
缺点:增加了开机损耗和空载损耗,空载电流会比正常情况下的空载电流大很多(取决于假负载阻值大小)。
假负载取值:Rx一般取值为0.05~0.1倍的额定负载。假负载上的耗散功率: ,因此,假负载的要根据耗散功率选取合适的封装,一般推荐0805/1206封装。
,因此,假负载的要根据耗散功率选取合适的封装,一般推荐0805/1206封装。
-
变频器假负载的原理、应用和注意事项2024-02-04 4474
-
直流电机控制电路的工作原理2023-12-20 4071
-
ups电源控制电路工作原理2023-12-08 4066
-
主电路和控制电路的工作原理2023-04-23 12194
-
开关电源为什么要接假负载?2022-03-23 3709
-
步进电机控制电路的工作原理是什么?2021-06-29 1903
-
一款工作于恒流状态的100W30V可调假负载电路相关资料分享2021-06-04 1910
-
点动自锁混合控制电路工作原理2020-02-16 80474
-
电子假负载电路原理2019-10-22 10464
-
假负载的工作原理和使用方法2018-03-15 27861
-
开关电源进阶篇:使用假负载对电路进行检修2015-01-27 2831
-
汽车尾灯控制电路工作原理及设计2012-11-01 73749
-
双稳态控制电路图2009-06-28 4974
-
PWM控制电路的基本构成及工作原理2006-03-11 9455
全部0条评论

快来发表一下你的评论吧 !
