

SR触发器的工作原理及应用示例
描述
目前为止,常见的电路包括多路复用器、解复用器、编码器、解码器、奇偶校验发生器和校验器等被称为组合逻辑电路。在这些类型的电路中,输出仅取决于输入的当前状态,而不取决于输入或输出的过去状态。
除了很小的传播延迟外,当输入发生变化时,组合逻辑电路的输出会立即发生变化。
还有另一类电路,其输出不仅取决于当前输入,还取决于过去的输入/输出。这些类型的电路称为顺序逻辑电路。那么,如何获得“之前的输入/输出”数据?所以必须有某种“内存”来存储数据以备后用。可以存储数据并充当“内存”单元的设备或电路称为锁存器或触发器。
使用反相器的触发器
触发器是一种基本的存储单元,可以存储1位数字信息。它是一个双稳态电子电路,即它有两种稳定状态:高或低。由于触发器是双稳态元件,其输出保持在任一稳定状态,直到应用外部事件(称为触发)。
由于它在应用输入后很长时间仍保留输出(除非进行了某些更改),因此触发器可以被视为存储设备,它可以存储一个二进制位。
可以使用两个串联的反相器设计一个简单的触发器,从第二个反相器的输出到第一个反相器的输入的反馈。以下电路显示了使用反相器的触发器:
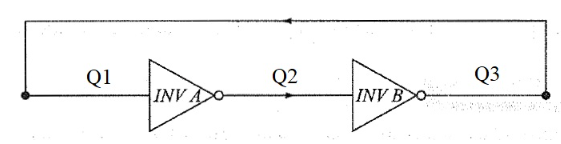
令Q1为输入,Q3为输出。最初,假设反馈已断开,并且通过将Q1连接到地而使其变为0(逻辑0、低电平、位0)。Q3也将为0。现在,如果连接了反馈并且输入Q1与地断开,则Q3仍将继续为0。

同样,如果用1(逻辑1,高电平,位1)重复相同的过程,而不是接地,则输出Q 3保持在 1。

上面是一个简单的触发器,有两个稳定状态,它保持在一个特定的状态,因此是一个内存,直到出现外部事件触发(这种情况下比如输入变化)。
SR触发器
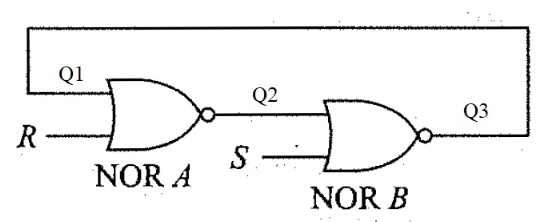
上述基于反相器的触发器只是为了理解工作原理,但它没有任何实际用途,因为没有提供任何输入。这就是NOR和NAND门发挥作用的地方。其实,上述基于反相器的触发器可以使用NOR门实现,如下图所示:
现在忽略“R”和“S”值,这里以更传统的形式重新绘制上述电路,并将Q2重命名为Q ,将Q3重命名为Q-(注意,字母上面的一横表示低电平有效,为方便写出,本文以“-”代替一横)。
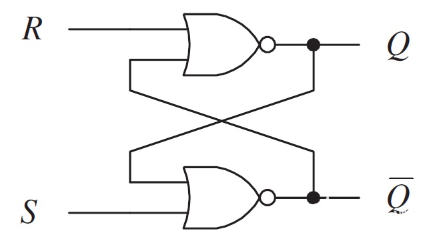
可以看出,触发器有两个输入:R和S以及两个输出:Q和Q-,从表示中可以清楚地看出输出是相互补充的。现在尝试分析输入的不同可能性及其对应的输出。
这里要注意的重要一点是,对于NOR门,逻辑“1”是主要输入,如果其任何一个输入是逻辑“1”(高),则输出为逻辑“0”(低),不考虑其它输入。
情况1:R = 0和S = 0
在第一种情况下,两个或非门的输入都是逻辑“0”。由于它们都不是主要输入,因此它们对输出没有影响。因此,输出保留了它们以前的状态,即输出没有变化。此条件称为保持条件或无变化条件。
情况2:R = 0且S = 1
在这种情况下,“S”输入为1,这意味着或非门B的输出将变为0。结果,或非门A的两个输入都变为0,因此或非门A的输出和因此Q的值为1(高)。由于输入S处的“1”使输出切换到其稳定状态之一并将其设置为“1”,因此S输入称为SET(置位)输入。
情况3:R = 1且S = 0
在这种情况下,“R”输入为1,这意味着或非门A的输出将变为0,即Q为 0(低电平)。结果,或非门B的两个输入都变为0,因此或非门B的输出为1(高电平)。由于输入R处的“1”使输出切换到其稳定状态之一并将其重置为“0”,因此R输入称为RESET(复位)输入。
情况4:R = 1 且 S = 1
这种输入条件是禁止的,因为它会强制两个或非门的输出变为0,这违反了互补输出。即使应用了此输入条件,如果下一个输入变为R = 0和S = 0(保持条件),也会导致或非门之间出现“竞争条件”,从而导致输出处于不稳定或不可预测的状态。
因此,根本不使用输入条件 R = 1和S = 1。
所以,基于上述情况和不同的输入组合,SR触发器的真值表如下表所示。

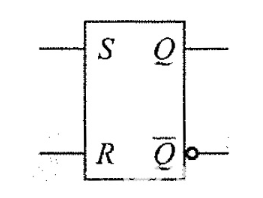
SR触发器的逻辑符号如下所示:
使用NAND门的SR触发器(技术上称为RS-触发器)
SR触发器也可以通过两个NAND门的交叉耦合来设计,但是Hold和Forbidden状态是相反的。它是一个低电平有效输入SR触发器,因此称之为RS-触发器。使用与非门的SR触发器电路如下图所示:
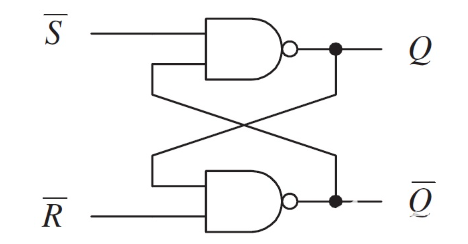
关于NAND门的一个重要点是它的主要输入是0,即,如果它的任何输入是逻辑“0”,则输出是逻辑“1”,而与其他输入无关。仅当所有输入为1时,输出为0。考虑到这一点,下面看看基于NAND的RS-触发器的工作原理。
情况1:R- = 1且S- = 1
当S-和R-输入都为高时,输出保持在先前的状态,即它保存先前的数据。
情况2:R- = 1 且S- = 0
当R-输入为HIGH且S-输入为LOW时,触发器将处于SET状态。当R-为高时,与非门B的输出,即Q-变为低。这导致与非门A的两个输入都变为低电平,因此与非门A的输出即Q变为高电平。
情况 3:R- = 0且S- = 1
当R-输入为LOW且S-输入为HIGH时,触发器将处于RESET状态。由于S-为高电平,与非门A的输出即Q变为低电平。这导致与非门B的两个输入都变为低电平,因此与非门B的输出即Q-变为高电平。
情况 4:R- = 0且S- = 0
当R-和S-输入均为低电平时,触发器将处于未定义状态。因为S和R的低输入,违反了触发器的规则,即输出应相互补充。因此,触发器处于未定义状态(或禁止状态)。
下面的真值表总结了在NAND门SR触发器的工作原理:

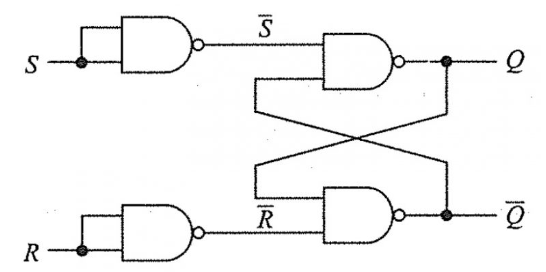
另外,通过反转输入可以将使用NAND门的RS-触发器转换为具有与常规SR触发器相同的真值表。除了使用反相器,还可以使用具有公共输入的与非门,如下图所示。
简单SR触发器的问题在于它们对控制信号的电平敏感(尽管图中未显示),这使得它们成为透明设备。为了避免这种情况,引入了门控或时钟SR触发器(无论何时使用SR 触发器,它通常指的是时钟SR触发器)。时钟信号使设备边沿敏感(因此没有透明度)。
时钟SR触发器
目前主要有两种类型的时钟SR触发器,分别是基于NAND和NOR。使用NAND门的时钟SR触发器电路如下图所示:
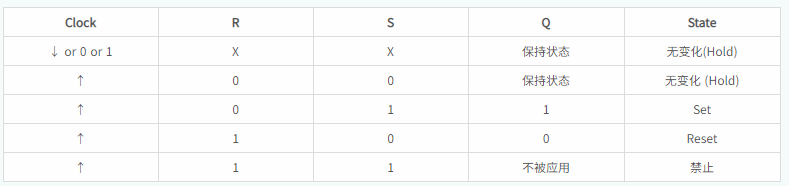
该电路是通过在基于NAND的SR触发器上添加两个NAND门而形成的。当额外的与非门反转输入时,输入为高电平有效。时钟脉冲作为两个额外与非门的输入。因此,时钟脉冲的转换是该设备运行的关键因素。现在假设它是一个上升沿触发设备,这个触发器的真值表如下所示:
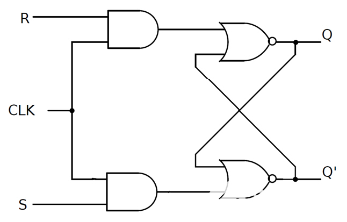
同样可以通过使用或非门来实现。使用NOR门的时钟SR触发器电路如下所示:
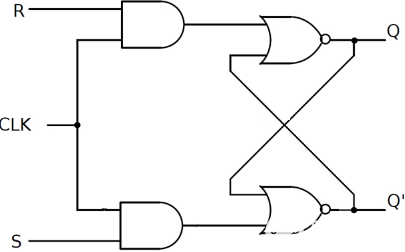
上图图显示了RS触发器的结构(因为R与输出Q相关联),SET和RESET的功能保持不变,即当S为高电平时,Q设置为 1,当 R为高电平时,Q为重置为0。
应用示例
SR触发器是非常简单的电路,但由于其非法状态,S和R都为高电平(S = R = 1),因此在实际电路中没有广泛使用。但它们用于开关电路,因为它们提供简单的开关功能(在置位和复位之间)。
一种这样的应用是开关去抖动电路。SR触发器用于消除数字电路中开关的机械弹跳。
机械弹跳
机械开关在按下或释放时通常需要一些时间并振动几次才能稳定下来,开关的这种非理想行为称为开关弹跳或机械弹跳。这种机械弹跳往往会在低电压和高电压之间波动,这可以通过数字电路来解释。
这可能会导致脉冲信号的变化,而这些不需要的脉冲系列将导致数字系统无法正常工作。
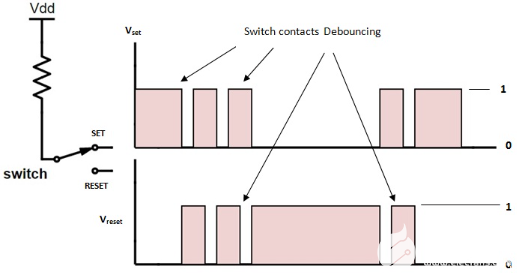
例如,在信号的这个反弹周期中,输出电压的波动非常大,因此寄存器计数多个输入而不是单个输入。为了消除数字电路的这种行为,使用了开关去抖电路,在这种情况下,使用了SR触发器。
SR触发器如何消除机械弹跳?
根据当前状态输出,如果按下置位或复位按钮,则输出将以计数多个信号输入的方式发生变化,即电路可能会接收到一些不需要的脉冲信号,因此由于机械弹跳作用机器,Q的输出没有变化。
按下按钮时,触点将影响触发器的输入,并且当前状态将发生变化,并且不会对任何其他机械开关弹跳对电路/机器产生进一步影响。如果开关有任何额外的输入,则不会发生变化,并且SR触发器将在一小段时间后复位。
因此,只有在SR触发器执行状态更改后,即仅在接收到单个时钟脉冲信号后,才能使用相同的开关。
开关去抖电路的电路如下所示:
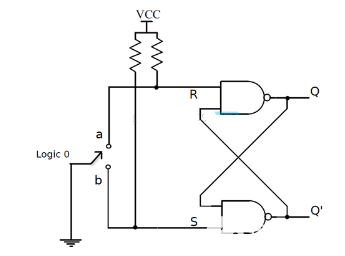
开关的输入接地(逻辑0),有两个上拉电阻连接到每个输入。它们确保当开关在触点之间时触发器输入S和R始终为1。
另一个电路可以用NOR SR触发器构成,如下图所示:
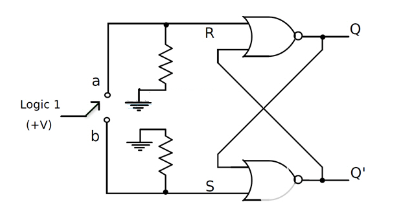
开关的输入连接到逻辑1,有两个下拉电阻连接到每个输入。它们确保当开关位于触点a和b之间时,触发器输入S和R始终为0。
用于消除机械开关抖动的常用IC是MAX6816 – 单输入、MAX6817 – 双输入、MAX6818 – 八输入开关去抖动 IC。这些IC包含带有SR触发器的必要配置。
总结
以上就是关于SR触发器的基本内容,主要包括SR触发器的工作原理、使用NOR和NAND门的实现、时钟SR触发器以及SR触发器的重要应用。
需要注意的是,术语“latch(锁存器)”和“flip-flop(触发器)”将作为同义词使用,尽管在技术上它们略有不同。简单来说,触发器是一个时钟控制的锁存器,即只有在有时钟信号(高或低电平,取决于设计)时,输出才会改变。
-
rs触发器的工作原理 rs触发器和sr触发器的区别2024-10-21 11179
-
rs和sr触发器的工作原理 为什么rs触发器可以消除机械抖动2024-01-29 9252
-
锁存器与触发器的工作原理是什么2021-11-03 4874
-
电平触发器,脉冲触发器和边沿触发器的触发因素是什么2021-02-11 11195
-
单稳态触发器有哪些_单稳态触发器工作原理介绍2018-03-28 44126
-
主从sr触发器基本原理分析2018-02-08 64163
-
jk边沿触发器工作原理2018-01-30 38778
-
锁存器和触发器原理2010-08-18 2085
-
或非门交叉SR触发器和与非门交叉SR触发器2010-08-10 8046
-
JK触发器工作原理详细介绍2010-03-08 54997
-
CMOS触发器的结构与工作原理2009-10-17 8056
-
rs触发器工作原理2008-01-21 12460
全部0条评论

快来发表一下你的评论吧 !
