

FullCAN和BasicCAN是什么?有何区别
描述
在搞清楚FullCAN和BasicCAN是什么之前,我们先搞清楚一些基础的东西。
1 基础概念
提示:
以英飞凌tc397为例。
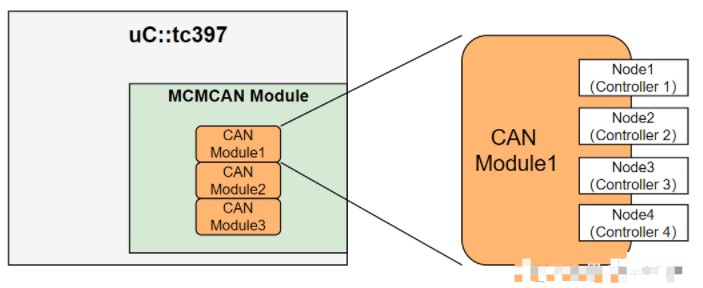
1、CAN Module与CAN Node、Controller关系
平时开发中,我们说“ECU有3路CAN”,所说的“3路CAN”和3个Node是一个概念吗?不是。
我们平时所讨论的“3路CAN”是指3个网络,也就是我们口语中的“节点”。而芯片手册中(Data Sheet),一个CAN Module会包含多个Node(即,Controller),比如:tc397芯片手册中,MCMCAN Module包含3个CAN Module,每个Module包含4个Controller,如下所示:
2、Controller与Transceiver关系
在实际的使用中,一个Controller必须配一个Transceiver,Controller+Transceiver = Network,如下所示:
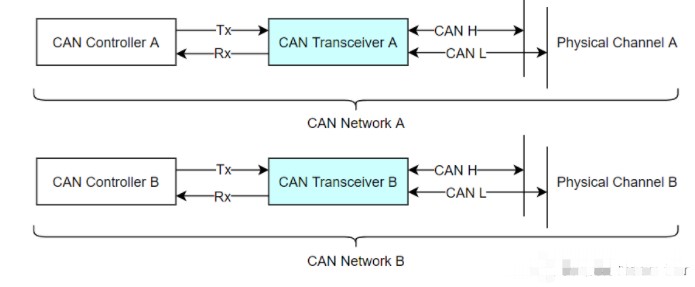
所以,平时我们口语话的“3路CAN”是指3个Controller+Transceiver组合,即:3个Network,我们也常称“3个节点”。
3、Controller与RAM资源关系
刚提到,tc397中,一个CAN Module包含4个Controller,那每个Controller可以发送多少个CAN报文,接收多少个CAN 报文呢?这里我们要区分硬件缓存CAN报文的数量和项目中要求发送/接收报文的数量。
硬件缓存CAN报文数量:是指上层请求发送报文或者接收报文时,CAN驱动最多能缓存的数量;
项目中要求发送/接收报文的数量:是指当前节点要外发或者接收的报文数量。
以发送CAN报文数量为例:需求要求当前网络节点发送100帧CanID不同的CAN报文,实际该节点CAN Controller可用的硬件发送缓存区最多有32,意味着底层硬件最多缓存32帧发送报文,如果超过32帧发送请求,则会因没有硬件空间缓存而发送请求失败。
tc397 CAN Module资源情况如下所示:
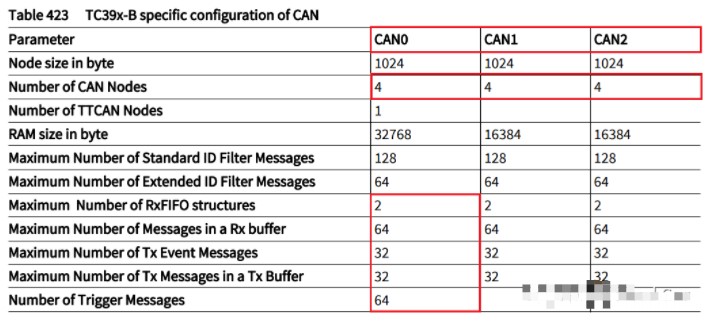
提示:上图中的Controller用“Node”表示。由上可以看出,3个CAN Module,共12个Controller。
每个CAN Module(4个Controller)共用32个发送Tx Buffer,共用64个Rx Buffer
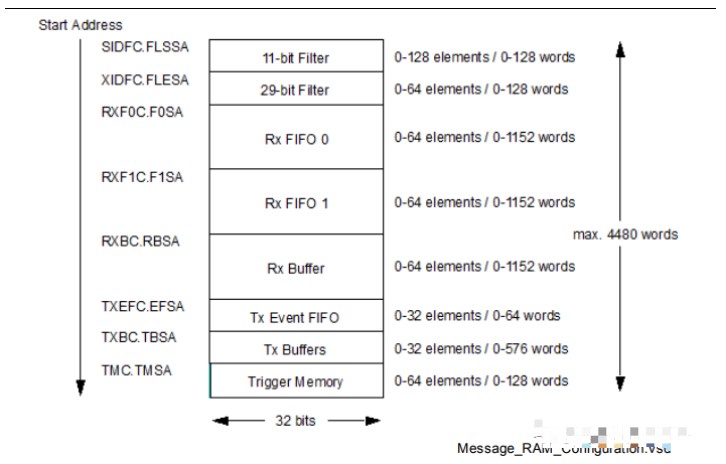
...对于发送缓冲区,每个CAN Module共用32个发送缓冲区,如果配置了32个Tx Dedicated Buffer,则没有空间配置Tx FIFO/Queue;同理,每个CAN Module虽然有两个Rx FIFO,如果配置了64个Rx Dedicated Buffer,则没有空间配置Rx FIFO。一般,Tx/Rx Buffer配置时,会混合使用,比如:
20 Tx Dedicated Buffer+ 12 Tx Queue
40 Rx Dedicated Buffer+ 24 Rx FIFO
MCMCAN
Module RAM区地址划分顺序如下所示:
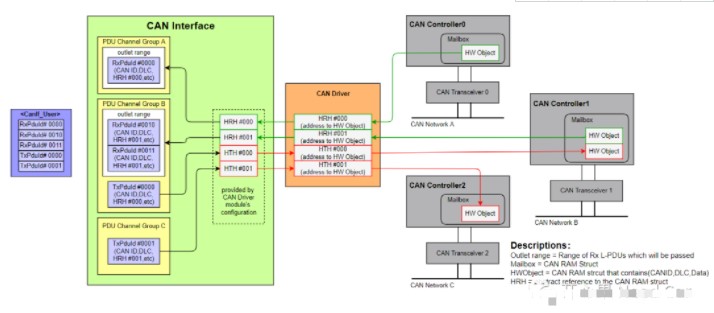
4、Mailbox、HRH、HWObject
Mailbox:邮箱,就是CAN驱动所具有的接收缓存区和发送缓存区,接收缓存区和发送缓存区均在RAM区。
HWObject:硬件对象,包含CAN ID、DLC、Data等信息的RAM区。
HRH:Hardware Receive Handle,接收句柄,一个HRH表示一个接收HWObject。
HTH:Hardware Transmit Handle,发送句柄,一个HTH表示一个发送HWObject。
Mailbox、HWObject、HRH、HTH、Controller、Transceiver之间的关系如下所示:
2 FullCAN和BasicCAN是什么?
首先,FullCAN和BasicCAN是CanIf模块配置的参数。
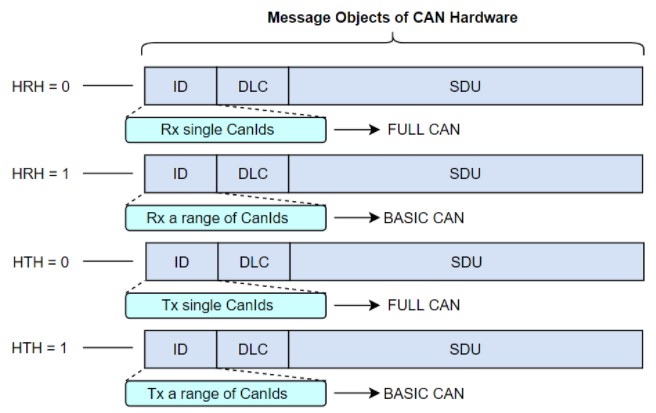
BasicCAN:一个HWObject(Hardware Object)可以处理一段范围的CanId
FullCAN:一个HWObject(Hardware Object)只能处理单个CanId
Autosar对FullCAN和BasicCAN的解释如下所示:

将上述的解释进一步细化,如下所示:
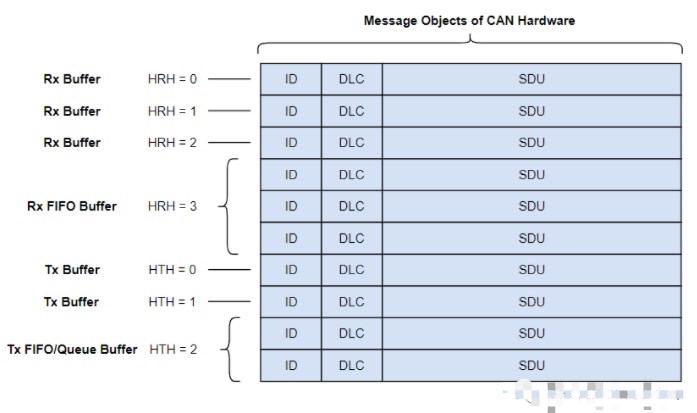
使用工程中,MCAL会将缓存区分配成FIFO和Dedicated Buffer,FIFO和Dedicated Buffer的区别是什么呢?Dedicated Buffer区域,Hareware Object与HRH/HTH一一对应,而FIFO区域,一个HRH/HTH对应多个Hareware Object,如下所示:
3 为什么需要FullCAN和BasicCAN?
在CAN驱动层,可以通过过滤的方式,过滤一段范围内的CanID,也就是说:会有一段范围内的报文接收进来,但是接收进来的这一段范围的报文并不一定都是上层所需要的,怎么办呢?用软件方式,再过滤一遍,由CanIf过滤所需要的CAN报文。因此,提出了FullCAN和BasicCAN的概念。
比如:HRH对应BASIC CAN类型,接收CanID范围:0x10~0x18,CanIf根据过滤算法,在0x10~0x18范围内过滤出需要的0x10、0x13、0x14、0x16、0x17送给上层,而其余的丢弃,如下所示:
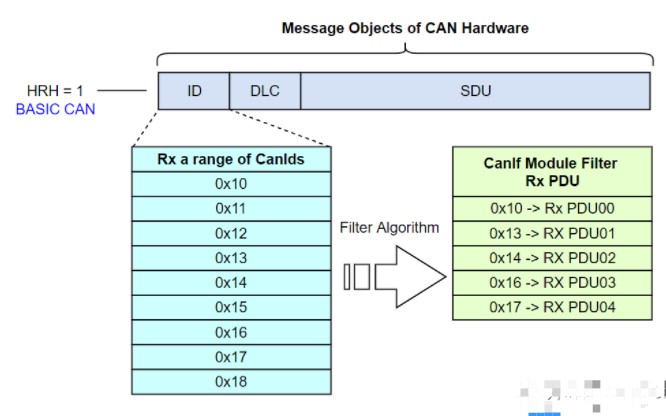
CanIf可以通过设置CANIF_HRHRANGE_LOWER_CANID、CANIF_HRHRANGE_UPPER_CANID方式过滤,也可以通过设置CANIF_HRHRANGE_BASEID、CANIF_HRHRANGE_MASK进行过滤。
不同报文类型如何选择FULL CAN/BASIC CAN
应用报文:一般选择配置成FULL CAN类型,对于应用报文,一般不需要缓存,使用最新接收的数据即可。对于发送的应用报文,都配置成FULL CAN类型需要一个前提:上层需要发送应用报文数量<底层硬件缓存区数量。比如:底层发送硬件缓存区数量为32,节点需要发送的应用报文数量为50,显然无法将50个发送的应用报文都配置成FULL CAN。遇到这种情况,一般会将重要的应用报文配置成FULL CAN,而其他要发送的应用报文配置成BASIC CAN。这样配置以后,硬件缓存区的分配就需要混用,即:Dedicated Tx Buffers+Tx Queue或者 Dedicated Tx Buffers+Tx FIFO,如下所示:
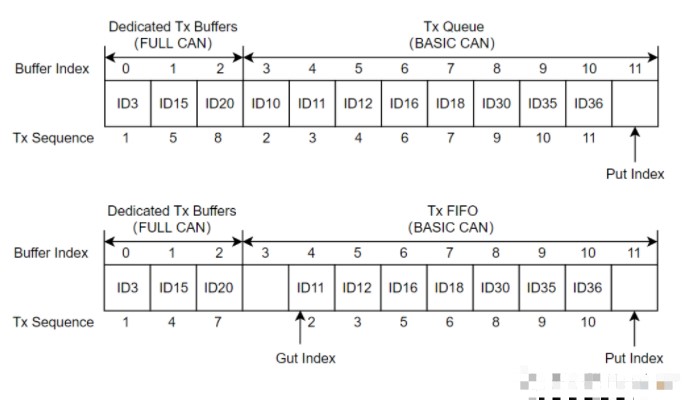
如上图,ID3、ID15、ID20是比较重要的应用报文,配置成FULL CAN,分别给一个独立的缓存区;其他的缓存区则配置成BASIC CAN,即:一个缓存区可以发送多个不同CanID的报文。
诊断报文:一般选择配置成BASIC CAN类型(结合FIFO Buffer使用),因为诊断报文的请求/响应不能错序,需按照顺序处理,且数据不能覆盖;
网络管理报文:接收一般选择配置成BASIC CAN类型,因为一个节点一般会要求接收一段范围的网络管理报文,eg:0x500~0x53F。发送网络管理报文配置成FULL/BASIC CAN类型均可,如果资源够用,推荐配置成FULL CAN类型,因为每个节点的发送网络管理报文唯一;
标定报文:一般选择配置成FULL CAN类型。
审核编辑:刘清
-
TC377配置SMU FSP时,如何配置频率参数;三种模式有何区别,配置上有何区别?2025-08-08 2275
-
伺服电机和步进电机的过载特性有何区别2021-10-11 3708
-
伺服电机和步进电机有何区别?2021-10-12 2314
-
进程管理的同步与互斥有何区别以及联系2021-12-23 1428
-
DVR和NVR有何区别 谁将最终占领市场?2016-12-27 981
-
arm9与arm11有何区别?2017-11-10 4370
-
不同颜色的钻头到底有何区别,买哪种颜色的钻头更好呢?2021-05-19 6694
-
轴向和径向磁铁极化有何区别2022-04-02 11360
-
ZigBee 与 Z-Wave:有何区别?2023-01-03 2967
-
接地基础知识:PE 和 FG 有何区别?2023-03-10 21689
-
异构集成 (HI) 与系统级芯片 (SoC) 有何区别?2023-11-29 4867
-
3D 封装与 3D 集成有何区别?2023-12-05 2650
-
光耦与光继电器有何区别?2023-12-13 1919
-
什么是MPLS?有何特点?与SD-WAN有何区别?2023-12-27 1643
-
LED洗墙灯跟线条灯的区别,使用的芯片有何差异?2024-01-05 2999
全部0条评论

快来发表一下你的评论吧 !
