

ECU从休眠到网络唤醒时间怎么测?
描述
Q1:ECU从休眠到网络唤醒时间怎么测?
答:对于CAN网络,ECU从休眠到网络唤醒时间的测试方法如下:
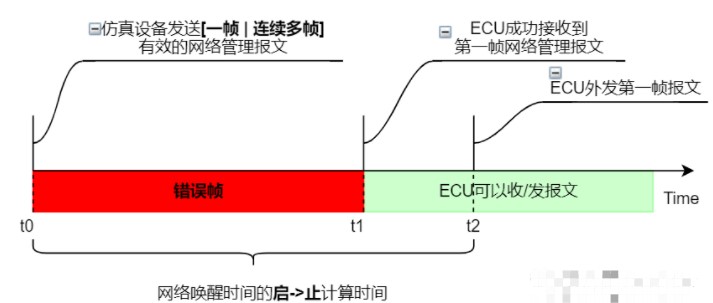
t0时刻,使用仿真设备(CANoe/PCan/ZLG等)发送一帧或者连续多帧有效的网络管理报文;
t0~t1期间,由于ECU休眠(主芯片断电,不考虑低功耗情况),Controller关闭,ECU不能接收仿真设备发送的报文,所以,此期间仿真设备发送的报文,ECU无法应答而出现错误帧(No Ack);
t1时刻,ECU主芯片供电,程序运行,Controller恢复正常工作模式(Transceiver也处于正常工作模式),可以接收报文;
t2时刻,识别到有效唤醒源(有效网络管理报文),通信打开,ECU外发第一帧报文。如果节点的网络类型是Passive Mode,第一帧外发报文是应用报文;如果节点的网络类型非Passive Mode,第一帧外发报文是网络管理报文。
所以,ECU从休眠到唤醒的启->止时间 = t0 -> t2,测试时计算此时间差值(t2-t0)是否满足需求。注意,t0时刻是指第一帧错误帧时刻。
上述时序如下所示:
提示:仿真设备为什么发送多帧网络管理报文?如果Transceiver没有PN(Partial Network)功能,不能识别网络管理报文,第一帧网络管理报文只是激活SBC,完成主芯片的供电任务,而没有被ECU有效接收,则需要第二帧网络管理报文唤醒节点网络。
Q2:节点被动唤醒进入RMS状态,RMB需要置位吗?
答:不需要。节点被动唤醒(收到其他节点的网络管理报文),由BSM(Bus Sleep Mode)进入RMS(Repeat Message State),此时CBV(Control Bit Vector)值 = 初始值,而CBV的初始值为0x00,如下所示:

如果在NOS(Normal Operation State)/RSS(Ready Sleep State )主动请求进入RMS,即:主动调用CanNm_RepeatMessageRequest()接口,RMB(Repeat Message Bit)置位,即:RMB = 1。
CanNm_RepeatMessageRequest()接口不能在RMS、PBM、BSM状态下主动调用,如下所示:

这意味着,节点被动唤醒的时候,网络状态由BSM进入RMS,所以RMB = 0。
审核编辑:刘清
-
电动汽车的ECU进入休眠后,目前有3种唤醒模式,CAN总线和AC电压的唤醒设计原理是什么?2024-02-02 1525
-
请问zigbee终端休眠和唤醒时间怎么确定?2018-08-08 3615
-
如果设备加入到网络后,在休眠后怎么检测到协调器掉网?2020-08-05 1731
-
如何实现局部网络的休眠唤醒机制?2021-04-19 3214
-
MSP430休眠唤醒装置设计详析2018-04-24 1415
-
单片机休眠与唤醒二三事2021-12-20 1352
-
LIN控制器休眠唤醒类型方式及测试案例2022-12-16 3863
-
网络关闭但ECU没有休眠前如何进行网络唤醒呢?2023-03-29 4763
-
ECU系统休眠后通过诊断报文唤醒ECU且唤醒网络2023-04-04 11918
-
ECU系统休眠后通过诊断报文唤醒ECU且唤醒网络后快发NM报文2023-05-09 9844
-
LIN休眠唤醒及测试心得2022-11-23 2639
-
理一理AUTOSAR架构下的唤醒源事件2023-07-14 8562
-
干货分享 | TSMaster—LIN 唤醒与休眠机制2024-09-25 5671
-
以太网休眠唤醒利器—OPEN Alliance TC102025-02-17 885
-
虹科分享 | TC10管理:虹科10BASE-T1S方案高效管控ECU休眠/唤醒2025-11-12 1720
全部0条评论

快来发表一下你的评论吧 !
