

CanSM模块如何处理Busoff等问题呢
描述
CAN总线中,相对其他通信类问题,Busoff问题比较难搞。本文从CanSM模块出发,就Busoff产生、Busoff信息交互、Busoff快/慢恢复等问题展开聊一聊。
这个话题前面有聊过,可以参考前文Autosar网络管理:说说Busoff那点事。
1 Busoff产生
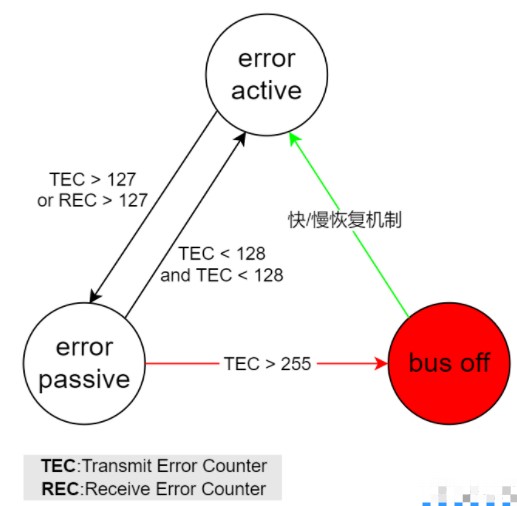
这里再说一次Busoff产生的条件:TEC > 255。也就是说ECU自身发出的报文错误,导致TEC(Transmit Error Counter)不断累加,直到TEC超过255产生Busoff,如下所示:
举例:ECU1::CAN1发送的错误帧只能使ECU1::CAN1进入Busoff状态,而不能使ECU2::CAN1进入Busoff,如下所示:
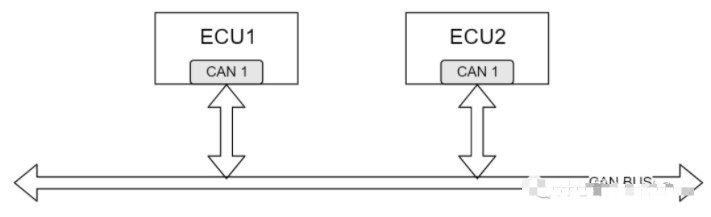
因为错误由ECU1::CAN1自己产生,ECU1::CAN1有问题,自己脱离CAN总线即可,不要影响ECU2::CAN1继续使用CAN总线。
2 Busoff信息交互及Busoff恢复机制
节点产生Busoff以后,ControllerMode状态自动切换到CANIF_CS_STOPED模式,停止发送错误帧,避免影响总线其他节点的通信。既然Busoff已经发生,对应的信息就需要传递给上层,让上层决策后续的通信行为。怎样通知上层呢?
Can Controller通知到上层有两种方式:Interrupt或者Polling。
Step1、Busoff事件信息如何通知到CanSM
Interrupt方式:
Busoff中断发生->
CanInterruptStatus()
->CanHL_ErrorHandling()->
CanIf_ControllerBusOff()
->
CanSM_ControllerBusOff()
->CanSM_BusOffIndicated(),CanSM_BusOffFlag = TRUE
...CanSM_MainFunction()周期性检查CanSM_BusOffFlag置位情况。
Polling方式:Can_MainFunction_BusOff()
->CanHL_ErrorHandling()->
CanIf_ControllerBusOff()
->
CanSM_ControllerBusOff()
->CanSM_BusOffIndicated(),CanSM_BusOffFlag = TRUE
...CanSM_MainFunction()周期性检查CanSM_BusOffFlag置位情况。
提示:上述函数关联关系,除Autosar标准接口以外,其他接口,不同软件供应商,实现上可能存在不同。
Step2、CanSM请求重启Can Controller,通知ComM、BswM模式切换
Busoff发生以后,CanSM调用CanIf_SetControllerMode()接口,请求将ControllerMode切到CANIF_CS_STARTED模式,以便于后续尝试恢复通信。同时关闭Tx PDU的发送,只能接收Rx PDU。所以这也是为什么在恢复期内可以收到报文的原因。CanSM调用BswM_CanSM_CurrentState()接口通知BswM进入CANSM_BSWM_BUS_OFF状态,调用ComM_BusSM_ModeIndication()接口通知ComM进入COMM_SILENT_COMMUNICATION状态。
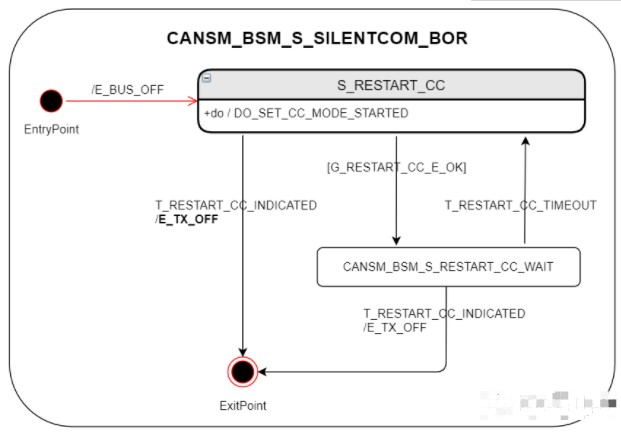
Busoff发生以后,CanSM先告知ComM,ComM在请求CanSM对应Channel由FULL COMMUNICATION进入SILENT COMMUNICATION。进入CANSM_BSM_S_SILENTCOM_BOR状态,如下所示:
Busoff发生以后,CanSM会启动一个Busoff Timer,Busoff Timer分为两种:
快恢复时间参数:CanSMBorTimeL1;
慢恢复时间参数:CanSMBorTimeL2。
具体Busoff Timer应该等于CanSMBorTimeL1还是CanSMBorTimeL2,取决于配置参数CanSMBorCounterL1ToL2。
如果Busoff连续发生次数 < CanSMBorCounterL1ToL2,Busoff Timer = CanSMBorTimeL1;
如果Busoff连续发生次数≥ CanSMBorCounterL1ToL2,Busoff Timer = CanSMBorTimeL2;
注意:CanSMBorTimeL1、CanSMBorTimeL2、CanSMBorCounterL1ToL2三个参数均在CanSM模块配置,具体数值根据OEM需求配置。测试中,busoff的快/慢恢复行为如下所示:
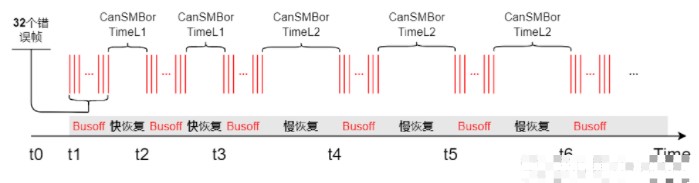
在快/慢恢复时间内,可以接收报文。
Step3、CanSMBorTimeL1或者CanSMBorTimeL2耗尽
CanSMBorTimeL1或者CanSMBorTimeL2耗尽(elapse),重新发送Tx PDU,让故障节点再次尝试向CAN总线发送报文。同时,CanSM通知BswM进入CANSM_BSWM_FULL_COMMUNICATION状态,通知ComM进入COMM_FULL_COMMUNICATION状态。可以启动CanSMBorTimeTxEnsured,确认Busoff是否恢复,也可以使用Confirm方式确认Busoff恢复。
Step4、CanSMBorTimeTxEnsured耗尽
在CanSMBorTimeTxEnsured时间内,Busoff再次发生,则进行下一次的Busoff恢复机制,如果CanSMBorTimeTxEnsured耗尽,则说明成功从Busoff状态恢复。如果在CanSMBorTimeTxEnsured时间内,再次发生Busoff,则Busoff次数累加。
3 Busoff发生时的网络状态
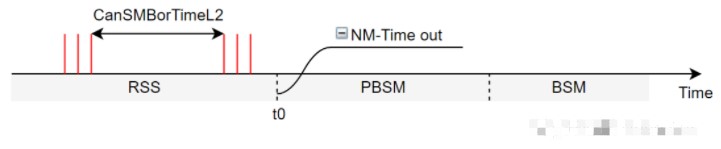
这里主要讨论Busoff进入慢恢复期,节点在NOS(Normal Operation State)和RSS(Ready Sleep State)下是否会进行网络状态切换。
NOS:Busoff进入慢恢复期,如果上层不主动请求释放网络,网络状态无法进入RSS,所以,节点会一直在NOS状态下,一直处于慢恢复状态,如下所示:

RSS:Busoff进入慢恢复期,如果在恢复期收不到有效的网络管理报文,NM-Timeout时间超时以后,进入PBSM(Pre Bus Sleep Mode);如果可以收到有效的网络管理报文,则网络处于RSS状态,如下所示:
如果节点在NOS状态下,一直处于慢恢复,会带来什么问题呢?节点一直在慢恢复期,意味着该节点不会外报文(应用报文和网络管理报文均不会外发),其他节点会上报对应的节点丢失故障。
审核编辑:刘清
-
DLPC3433的PCLK和PDATA【0~23】该如何处理呢?2025-02-27 487
-
串口接收不等长的数据如何处理的呢?2024-05-15 456
-
变压器运行中常见的异常现象应如何处理呢?2024-03-08 1255
-
如何处理MOS管小电流发热?2023-12-07 1678
-
如何处理同轴阻抗失配?如何避免阻抗失配这种风险呢?2023-11-28 2415
-
广播系统出现噪音、啸叫如何处理?2023-11-08 4285
-
调试TrustZone时,如何处理HardFault?2023-09-27 1707
-
什么是busoff?BUSOFF是如何产生的?BUSOFF恢复机制和故障码记录2023-09-04 46838
-
如何处理HTTP 503故障问题?2023-04-12 2236
-
如何处理轴表面磨损造成的伤害2022-02-15 933
-
如何处理好跨时钟域间的数据呢2021-11-01 1779
-
如何处理接口bewtween?2020-03-12 1912
-
请问STM32程序不使用的GPIO如何处理?2019-02-27 3314
-
如何处理电子污染2018-01-22 7676
全部0条评论

快来发表一下你的评论吧 !
