

多相转换电源效率的POL IC 设计
电源/新能源
描述
更高的能源效率已成为计算机服务器和高性能网络设备的关键要求。冷却这些系统的成本现在是它们的生命周期成本以及它们自身的能源使用的主要因素。此类系统依赖于先进的微处理器,在高性能计算应用程序中,还依赖于每秒能够进行数十亿次浮点运算的通用图形处理单元 (GPGPU)。这些处理器通常密集封装以最大限度地提高空间效率,并且每个处理器在以峰值速度运行时可能具有超过 100 W 的功率需求。因此,在苛刻的条件下,功率转换的热效率至关重要。
为了最大限度地减少跨服务器或交换机背板的配电损耗,这些系统通常设计为使用至少 12 V 的相对较高的中间电压。然后使用负载点 (POL) 转换器来提供低电压– 通常约为 1 V – 这些设备所需的电压。这通常导致需要高峰值电流值来处理处理器将在接近其热包络线的情况下运行的短暂时间。
传统上,POL 转换器的设计是为了在高负载下实现最高效率,因为这是过热可能最具破坏性的地方。目前使用的大多数 POL 转换器在满载时保证超过 90% 的效率。在密集的服务器中,这种效率至关重要,因为它确保标准空气冷却能够足够快地散热,以防止系统过热和处理器过热关闭的风险。在现代基于互联网的环境中,由于处理器突然关闭而丢失交易和请求会迅速损害收入和声誉。
然而,由于系统很少有超过一小部分的处理器以满负荷运行,因此在需要强制空气冷却时可能会损失大量能量。由于传统 POL 转换器的效率会随着负载的减少而下降,因此更大比例的冷却需要用于供电基础设施,而不是处理器本身。如果可以使 POL 转换器更高效,则可以缩减对强制空气冷却的需求,从而不仅可以节省服务器本身的费用,还可以节省周围的空调费用。
功率转换技术取得了进步,主要集中在每个 POL 转换器占用的电路板面积问题上。一种趋势是提高开关频率以降低峰值电流需求,这有助于将电容器等无源元件的尺寸保持在最低限度。但是,可以将开关频率推到多高是有限制的,尤其是在频率影响更大的大电流系统中。通常,在转换期间,控制开关的开关损耗与输出电流乘以所提供的能量和开关周期本身成正比。
越来越多的 POL IC 设计人员追求的解决方案是让一个输入由多个转换器处理。转换器彼此同步运行,但使用不同的相位。多相转换器中的振荡器是同步的,因此每个相位都以相同的频率 (f) 驱动,但相位偏移 360°/N,其中 N 是整个转换器中的相数。每个单独降压相位的输出与其他相位并联,使得纹波频率为 Nf 而不是 f。
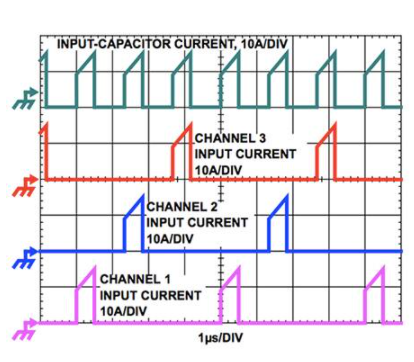
图 1:三相情况下的通道输入电流和输入电容器电流。
多相的使用意味着核心转换拓扑在不缩短开关周期的情况下保持了高频操作的优势,并且具有降低过纹波电流的好处,因为电流脉冲之间的间隙比单相的短得多。转换拓扑。这也改善了电磁干扰 (EMI) 特征,因为转换器内的电流变化率低于传统方法。
对于多相或多相转换器,有效工作频率实际上是基本开关频率乘以相数。结果,瞬态响应得到改善,这对于高级处理器来说很重要,因为功率需求可以在很少的时钟周期内发生变化。
多相降压转换器拓扑具有更多封装优势。每个通道都以可比单相降压转换器的一小部分转换功率,从而减小了设计中使用的电感器和功率 MOSFET 的尺寸。较小的功率 MOSFET 可降低动态损耗,因为它们具有较小的寄生电容。同样,由于纹波电流减小,电容器的损耗也更低。
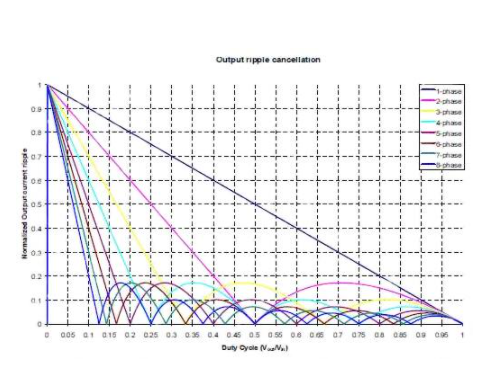
图 2:一系列不同多相选项的纹波电流与占空比的关系。
在峰值需求时,转换器中的所有相位都处于活动状态。然而,随着处理器速度变慢并且其功率需求下降,转换器可以关闭一个或多个相位,从整体能量需求中消除该相位的开关损耗。结果是一个 POL 转换器对负载的需求做出动态反应。相位控制可以分配给本地微处理器或使用 PMBus 信号的板级电源控制器。PMBus 命令可让中央电源管理器打开或关闭相位。
多相转换器通过集成 PWM(脉宽调制)电流模式控制器、远程感应、可选相位控制、固有电流共享能力、大电流 MOSFET 驱动器以及过压和过流保护,帮助最大限度地减少外部组件数量并简化整个电源设计特征。在更高的功率水平下,可扩展的多相控制器减小了电容器和电感器的尺寸和成本。
为了在定制设计中提供对多相转换的控制,Intersil 的 ISL6364A具有专为低压处理器和 GPU 设计的双 PWM 输出。它有一个四相PWM来控制微处理器内核或存储器电压调节器。它的第二个 PWM 控制器是单相设计,用于控制 I/O 的外围电压调节器。该器件使用 Intersil 专有的增强型主动脉冲定位 (EAPP) 调制方案,以比标准设计更少的输出电容器实现快速瞬态响应。
ISL6364A 的设计符合英特尔为 VR12/IMVP7 级稳压器提供的规范。这些稳压器支持 POL 转换器和处理器之间的密切合作。反过来,如果处理器看到电流下降到某个点以下,则可以通过 SVID 总线向控制器发送低功耗模式信号。然后控制器可以使用单相或两相操作进入低功耗模式。在超低功耗模式下,它可以通过二极管仿真选项以单相运行。在 PSI 低功率信号被取消断言后,丢弃的相位被添加回来以支持更重的负载。ISL6364A 还支持自动切相以优化效率,而无需处理器参与。
在非常低的负载水平下,即使是单相也会失去效率。DC/DC 控制器供应商已经实施了脉冲跳跃或突发模式等技术。在突发模式下,开关电路仅在输出电压开始超出调节范围时激活。
在诸如LTC3856的器件中来自凌力尔特的睡眠信号在平均电感电流高于负载电流时被激活。在睡眠模式下,负载电流由输出电容提供。当输出电压下降得足够多时,休眠信号被禁用,转换器在下一个周期激活以供电,直到休眠信号被重新置位。脉冲跳跃模式通过在检测到轻负载条件时一次不切换几个周期来提供较低的纹波,尽管与突发模式相比整体效率降低。这种架构为设计人员提供了一种节能方法的选择,以最适合在效率和其他因素(例如输出纹波)之间进行权衡。
在更高的负载水平下,LT3856 执行自动切相和重新激活。当板载反馈误差放大器的输出电压达到用户可编程电压时,触发级脱落操作。在此编程电压下,控制器关闭其一个或多个相位,并阻止功率 MOSFET 开启和关闭。这种在阶段脱落发生时进行编程的能力提供了确定何时进入这种操作模式的灵活性。
对于需要对系统中运行的相数进行高度控制的设计,德州仪器 ( Texas Instruments ) 提供了TPS40140,一种多功能控制器,可以作为单个控制器运行,也可以在多控制器配置中“堆叠”。TPS40140 有两个通道,可配置为单输出的多相或具有两个独立输出电压的双输出。但是,单个控制器的两个通道总是异相 180 度切换。
在多设备系统中,通常希望同步每个设备的时钟以最小化输入纹波电流以及辐射和传导发射。这是通过将其中一个控制器指定为主控制器而将其他控制器指定为从控制器来实现的。要创建一个 12 相系统,设计人员需要添加五个从设备,使用 PHSEL 和 CLKIO 线互连,然后设置它们响应主时钟信号的方式。
从机通过在主机的 PHSEL 输出上使用串联的 39 kΩ 电阻器从主机 CLKIO 信号中检测正确的时钟信号。根据主设备的设置方式,CLKIO 信号为开关周期的每个周期生成 6 个或 8 个时钟。为了进一步将总电流容量增加到十二相,或增加输出数量,使用了五个从控制器,并在 PHSEL 线上设置了两个电阻器。为了实现 12 相操作,三个从控制器上的 ILIM2 引脚连接到高电平,以便它们在其相应 CLKIO 信号的下降沿而不是默认上升沿触发。
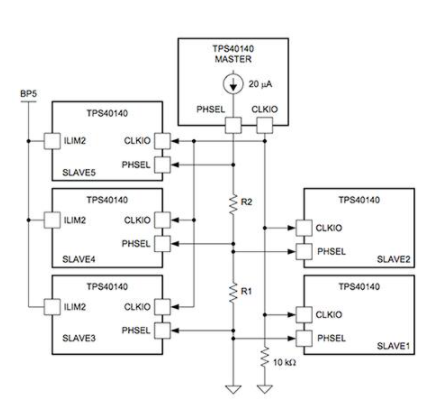
图 3:使用六个 TPS40140 器件的十二相配置。
随着能源效率继续成为服务器设计人员关注的一个领域,多相 POL 策略可能会变得更加普遍,我们将看到电路对负载要求的快速变化和低负载条件的反应方式的进一步改进.
-
高速数据转换器的高效PoL电源设计2024-09-21 506
-
为什么DC-DC转换器应尽可能靠近负载的负载点(POL)电源?2023-09-19 2253
-
如何测量多相降压转换器集成电路的效率2022-12-15 1955
-
多相位电源的优势2022-11-23 768
-
基于TPS40425的高效率多相解决方案2022-09-16 1181
-
负载点DC-DC转换器解决电压精度、效率和延迟问题2021-12-07 2797
-
为什么使用DC-DC转换器应尽可能靠近负载的负载点(POL)电源?2021-12-01 3036
-
多相DC/DC转换器实现远超90%的效率2019-06-12 1601
-
多相稳压器提供高效率解决方案2019-05-13 1794
-
高密度12V输入、0.8V 200A和3.3V 75A POL参考设计2018-10-10 1796
-
基于2个45A转换器的四相90A POL解决方案包含BOM,PCB文件及光绘文件2018-08-16 2293
-
POL 多相(3 相)、120A 电源参考设计2015-05-11 3126
全部0条评论

快来发表一下你的评论吧 !
