

浅谈适用于机器人的非接触式传感技术分析
机器人
描述
尽管流行科幻节目中的许多可视化小工具已经成为现实,例如移动通信、无人驾驶车辆和克隆,但如今的家庭和办公室中却奇怪地缺少机器人助手。毫无疑问,许多房主会抓住机会将重复的杂务交给愿意的机器人。
可以提出很多家用机器人的应用,但市场就绪的产品迟迟没有出现。造成这种情况的原因可能是没有充分定义客户要求,或者没有达到可负担性和功能之间可接受的平衡。随着处理能力的价格持续下降,这种情况开始发生变化。此外,作为小型、低成本的计算机板,例如 CircuitCo Beagle Board或者 Arduino 板已经被广泛使用,世界各地的机器人制造商社区能够吸引更多有智慧的人,从而创造条件来生产合适的平台,在消费市场上具有商业意义。
事实上,第一批家用自主机器人已经问世:价格不菲。现在可以将诸如吸尘地板和割草之类的杂务交给能够在整个房间或草坪上导航以清洁或割草整个区域的机器。现在可以以 200 美元左右的价格购买小型机器人吸尘器,而机器人割草机是市场上较新的产品,价格约为 1200 美元或更低。
爱好机器人展示了前进的道路
用于爱好建设者的机器人套件是市售的,例如 Parallax ActivityBot,并且使机器人能够完成诸如吸尘或割草之类的家务所需的引导技术得到了很好的开发和理解。这些在机器人设计竞赛中得到了磨练,例如自 1991 年开始举办的年度名古屋国际微型机器人迷宫竞赛 (MAZE)。
ActivityBot 是一个基本的教育机器人,搭载各种技术,包括电力电子、处理和传感。
沿着线迷宫的算法可以基于两个简单规则之一。对于基本迷宫,假设没有循环,无论是右手规则还是左手规则,都将保证成功。右手法则总是优先考虑右转而不是直行或左转。如果没有右转选项,右手法则将始终直行而不是左转。相反,左手规则更喜欢左转或直行而不是右转。
机器人可以使用红外传感器阵列检测要遵循的线路,这些传感器将红外(或可见光)照射到地板上并监控反射。红外反射光学传感器,例如Vishay TCND5000可能用过了。将传感器串联布置在机器人的底盘上,可以通过使用简单的逻辑来准确检测左、右或死点位置,例如假设从白色地板反射的光产生高传感器输出,而从暗线导致低输出。当输出发生变化时,可以检测到线迷宫中的 T 形接头,以便所有传感器同时指示看到黑色。类似地,如果左侧传感器指示黑色而右侧指示白色,则可以检测到左转或右转,反之亦然。所有检测到白色的传感器都表示死路。假设底盘有独立驱动的轮子,左侧和右侧电机的相对速度可以根据检测到的模式进行调整,
尽管迷宫竞赛有助于加速机器人运动控制的发展,但简单的路线跟踪并不适合真空吸尘器或割草机等商业设备。需要不同的位置感应策略。
从挑战到家务
一个完善的机器人真空吸尘器系列使用光学中断来检测事件,例如到达墙壁或台阶顶部,或检测设备何时被拾起,因此应该关闭。光学传感器安装在机器前缘的传感器条中。这些传感器可以包含分立的发射器和检测器,也可以是集成类型,例如Omron EE-SX-3070微型光电传感器,包括发射器和光电探测器元件,内置放大器和温度补偿。传感器条有一个模制保险杠,该保险杠包含一个光束阻挡器,当保险杠与墙壁接触时偏转时,该光束阻挡器在发射器和检测器之间移动以中断光束。就 EE-SX-3070 而言,当光电探测器变暗时,其输出为 ON。作为替代部件,EE-SX-4070 在检测器点亮时提供 ON 输出。机器人控制器可以使用产生的信号作为已经到达房间边缘的指示,并且可以指示从动轮改变方向。
类似的光学传感器或微型开关可用于检测机器何时被拾起,当机器从地板上抬起时车轮在其外壳中下降时激活。
对于楼梯检测,通过测量光学反射来感应地板的接近度。Vishay TCND5000 反射式光学传感器等传感器是合适的。TCND5000 是一款 6 mm x 4.3 mm 的表面贴装器件,在不包括可见光的封装中,在光电探测器旁边安装了一个红外发射器。它可以检测2毫米至25毫米范围内的接近度。
在机器人真空应用中,这种类型的传感器以朝下的方向安装在机器边缘的传感器条中,当反射信号突然变弱或不再检测到时,发出已到达楼梯的信号。
使用红外线或超声波距离测量可以实现更复杂的非接触式墙壁感应。基于红外线的测距传感器,例如Sharp GP2Y0A51SK0F产生与反射到内置探测器上的红外信号强度成比例的模拟电压。该传感器能够测量 2 厘米至 15 厘米的距离,通过使用三角测量方法计算距离,最大限度地减少检测表面的反射率对测量精度的影响。红外发射器、检测器和信号处理电路都集成在 27.0 mm × 10.8 mm × 12.0 mm 封装内(图 )。该传感器提供快速启动,在 5.0 ms 内产生第一个稳定的输出测量。对应于 15 cm 的电压和对应于 2 cm 的电压之间的典型输出差异为 1.65 V。
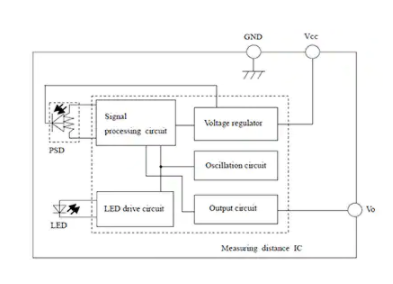
图 :Sharp GP2Y0A51SK0F 集成了生成与测量距离成比例的模拟输出电压所需的电路。
在适用于机器人引导的其他非接触式传感技术中,已经提出了使用超声波传感的距离测量。接近感应模块,例如Parallax PING)))™ 28015超声波距离传感器发出超声波“啁啾”并产生一个输出脉冲,当接收到回波时终止。该脉冲的持续时间表示到最近反射面的距离(图 )。在外壳的前部、后部和侧面放置多个超声波传感模块,使机器人能够检测其相对于障碍物的位置,而不会损坏设备或家居装饰品或家具。
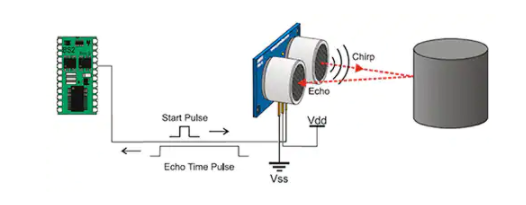
图 :使用超声波传感模块进行距离测量。
正如迷宫机器人“学习”它所跟随的迷宫一样,机器人真空吸尘器能够绘制出它们需要清洁的地面空间。通过映射,机器人能够返回其扩展坞,例如,当集尘器上的传感器发出信号表明它必须清空时,或者当电池充电状态传感器表明需要充电时。当准备好恢复运行时,机器人可以返回其最后的工作位置以继续。
让我们到外面去
机器人割草机必须应对一组不同的操作条件。通常没有方便的墙壁或其他反射面来指示工作区域的界限。取而代之的是,一根电线被埋在或钉在草坪的周围。驱动电路在边界线上传输信号,该信号可以是射频或音频信号,安装在割草机上的无线电接收器、麦克风或感应传感器等传感器可以检测设备何时到达边界。割草机通常会在铁丝网区域内随机移动,以切割比预先选择的切割长度更长的任何草。安全切断在此类应用中至关重要,包括用于避免碰撞的接近传感器和用于检测装置何时被拾起或可能意外倒置的传感器。
市场起飞?
随着经济实惠的机器人开始出现在消费者应用中,下一个发展前沿可能是机载机器人。Parallax Inc. 除了提供半导体和组件系列外,还提供教育套件,在市场上有许多飞行机器人套件,并正在推广无人机系统 (UAS) 教育计划。这旨在培养多个学科的专业知识,例如软件设计、电机控制、包括 GPS 在内的电子设计以及加速度计和陀螺仪的使用,以及更广泛的问题,例如负责任的飞行。潜在的应用可能包括紧急服务的救援援助,或玩具、新型花园照明或航空摄影等消费者应用。
会走路、会说话的机器人个人助理在一段时间内可能仍然是科幻幻想或昂贵研究项目的主题。然而,在成熟、可靠且价格合理的高性能处理器和传感器等技术的支持下,家用机器人的时代已经开始。
-
人形机器人关节扭矩传感器的详细应用场景及解决方案2026-05-20 198
-
机器人传感器2018-01-03 3823
-
基于深度学习技术的智能机器人2018-05-31 6456
-
机器人传感器的类别和应用原理2018-11-08 2986
-
工业机器人的技术原理2018-11-23 5101
-
机器人基础书籍2019-05-22 3665
-
机器人接触式物体探测的接触方式有哪些?2020-03-02 2320
-
机器人仿真实验2021-09-01 1576
-
浅谈儿童陪护机器人2023-05-11 1183
-
非接触式机器人直线轨迹测量系统2009-07-14 940
-
ABB推出的IRB 910INV机器人适用于快速精准的小件装配2018-09-20 2887
-
Vishay推出新型传感器,适用于工业机器人领域2019-12-08 1533
-
适用于Covid 19的非接触式门铃2022-10-28 662
-
适用于类人机器人的TI DLP® Pico™技术2024-08-23 486
-
基于近红外光的机器人非接触式传感系统2025-05-11 1213
全部0条评论

快来发表一下你的评论吧 !
