

 虚拟数字机器人仿真测试验证平台(C6657+FPGA架构)
虚拟数字机器人仿真测试验证平台(C6657+FPGA架构)
电子说
描述
一、平台特点
真正提供机器人控制器检测、验证平台,可检测各类工业机器人控制器的功能、性能指标;
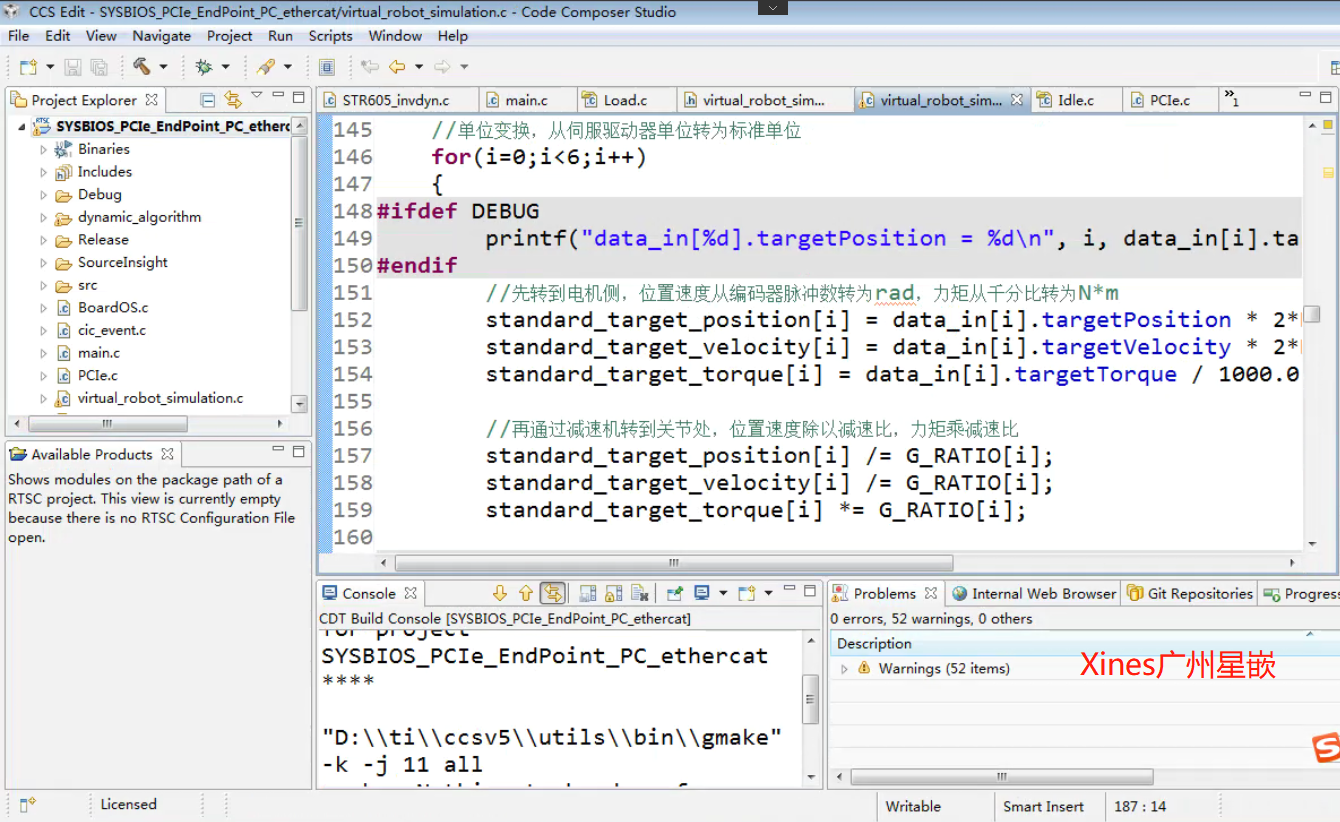
全国产化,具备从虚拟机器人软件框架到硬件采集电路全方位自主开发;
提供基于EtherCAT协议的检测、验证接口,提供“实物机器人+半物理平台+虚拟机器人”的运动及动力学系统辨识场景。
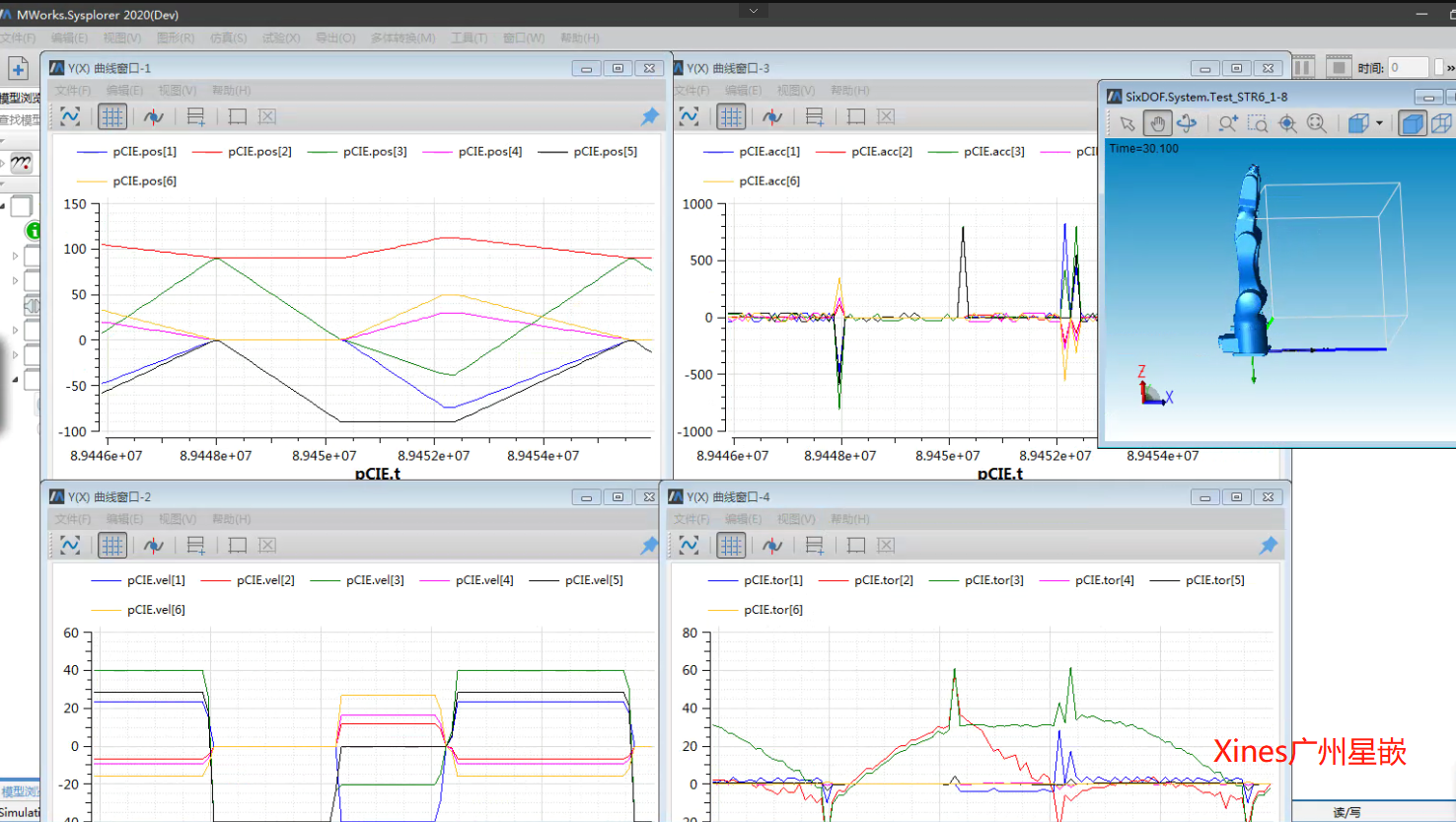
允许基于EtherCAT总线的机器人控制器连接,仿真硬件可实时吞吐仿真数据,实现ms级的检测、验证。


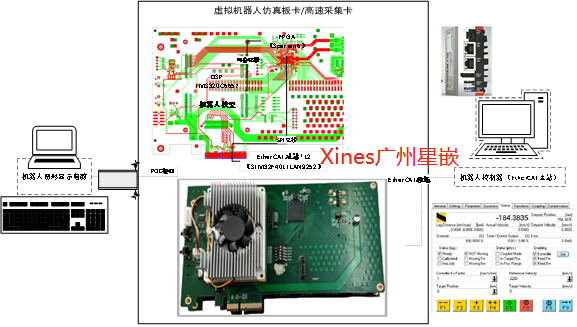
系统构成:
硬件包括DSP高速采集板+12个EtherCAT从站板,通过PCIe总线扩展;
软件架构:
支持Qt的可扩展检测界面,验证案例库,可导入机器人实体3D模型库,EtherCAT 组件库,数据分析和演示库,输出检测、验证表单等功能模块;
产品特色:
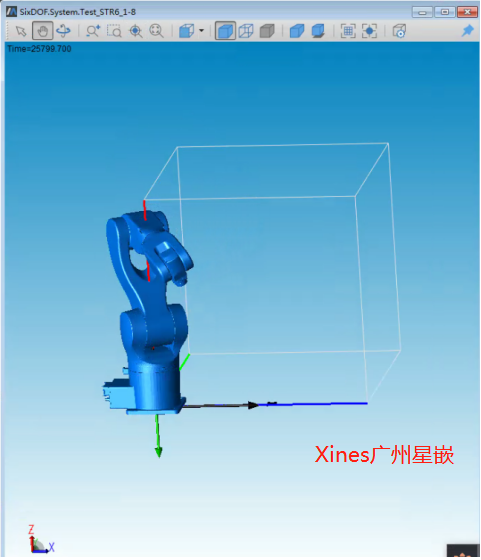
带重力场/摩擦力模型的矢量环境,可导入标准CAD模型,并提供数字电机、数字编码器、数字减速机建模,重构虚拟机器人物理元素,最大支持12个机器人关节及外轴模型;
二、系统优势
快速导入机器人3D模型,仅需一块PCIe卡连接一条网线,即可实现面向机器人控制器的功能与性能实验、测试、验证工作,国内首创;
基于EtherCAT协议,集成多种开发包,既可支持研究、开发方案验证,又可作为标准检测工具,可安全检测满负荷、超负荷运动及动力学功能;
实时接入EtherCAT从站,配置ESI文件为标准ECAT从站;兼容倍福、卡诺普、KEBA、固高、埃斯顿等工业机器人主站;支持采用KPA、acontis、codesys、 igh、 soem等被检主站控制器;
不仅仅是动画,是带采集硬件的科研平台!!!
实物展示
致力于DSP、ARM、FPGA、SoC等多核异构技术服务。
软硬件和算法团队,聚焦嵌入式行业, 提供全栈式解决方案。
咨询未必选择,只是多一个参考,欢迎交流与合作。
审核编辑 黄昊宇
-
多电机仿真篇丨双电机实时仿真测试应用2024-03-19 4441
-
盘点#机器人开发平台2025-05-13 1597
-
工业机器人仿真与编程2021-09-07 2425
-
如何对采集机器人的关节位置及TCP位置进行虚拟仿真2021-10-08 2820
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 806
-
工业机器人虚拟样机系统的研究2016-12-28 1821
-
机器人系统常用仿真软件介绍和效果2017-11-17 12218
-
使用Matlab和VR技术实现移动机器人的建模及仿真的方案说明2019-10-25 1874
-
基于三维仿真虚拟机器人解决与实施方案2020-10-12 1307
-
如何使用Matlab和VR技术实现移动机器人的建模和仿真2021-01-15 1670
-
数字信号处理虚拟试验仿真平台方案2021-05-29 1225
-
工业机器人虚拟仿真软件简述2023-04-27 8052
-
机器人仿真的类型和优势2024-10-14 2632
-
NVIDIA技术推动机器人仿真2025-01-03 1122
-
北京人形机器人创新中心中试验证平台正式启动2026-02-02 1410
全部0条评论

快来发表一下你的评论吧 !
