

基于R7FA2L1AB2DFL demo板测试CLKOUT时钟驱动CAN通讯
接口/总线/驱动
描述
测试目标
本次测试用的是RA生态工作室提供的R7FA2L1AB2DFL demo板,测试CLKOUT提供时钟驱动CAN通讯。
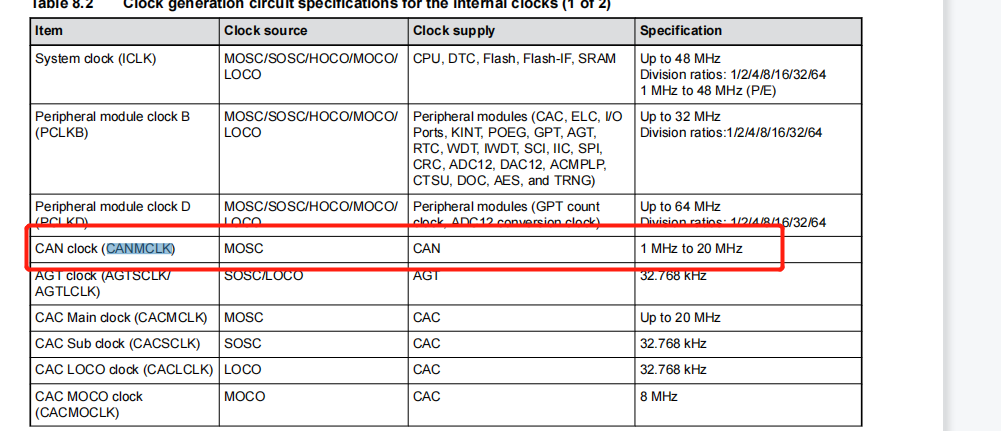
CAN模块的时钟
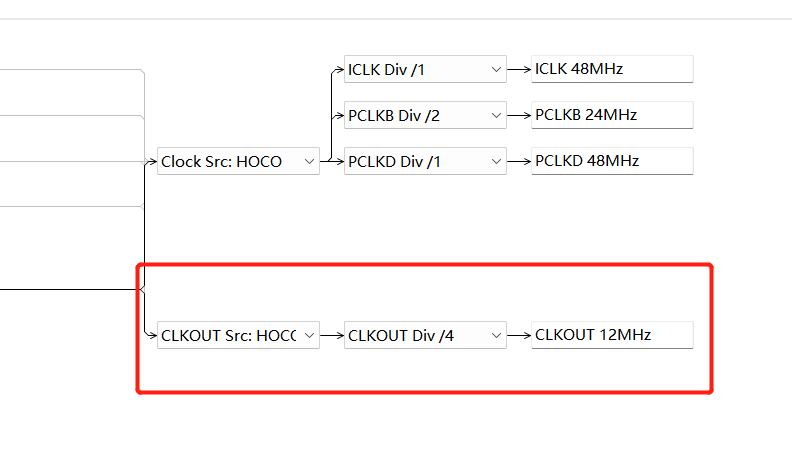
CLKOUT配置
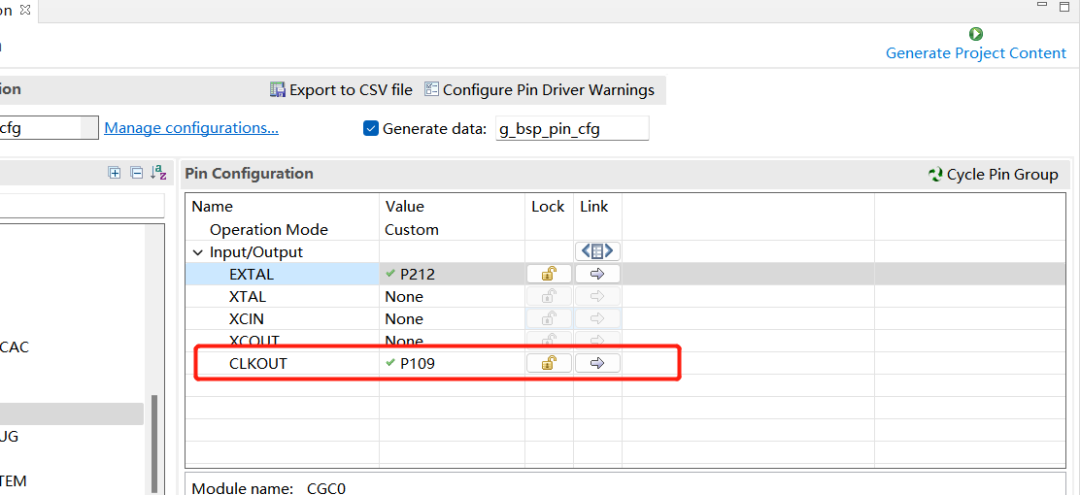
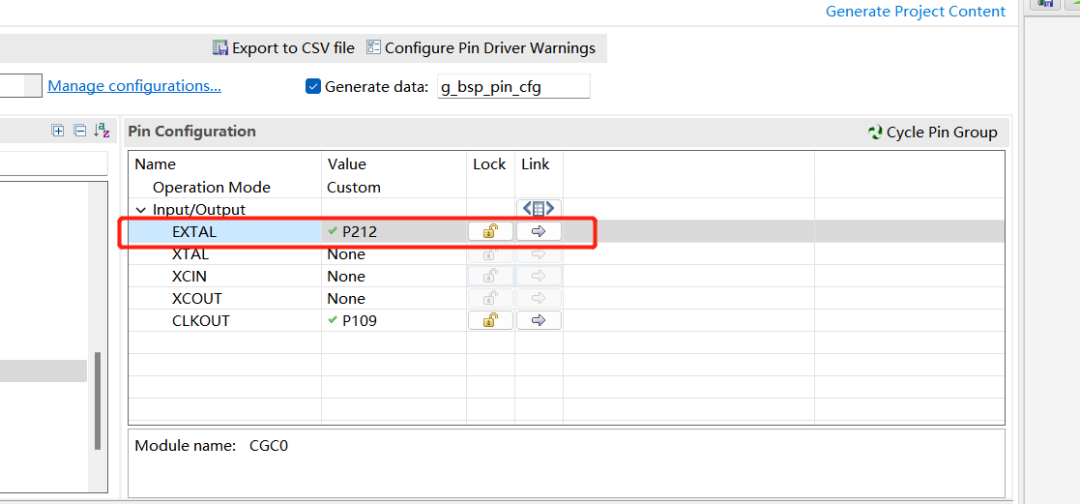
晶振配置
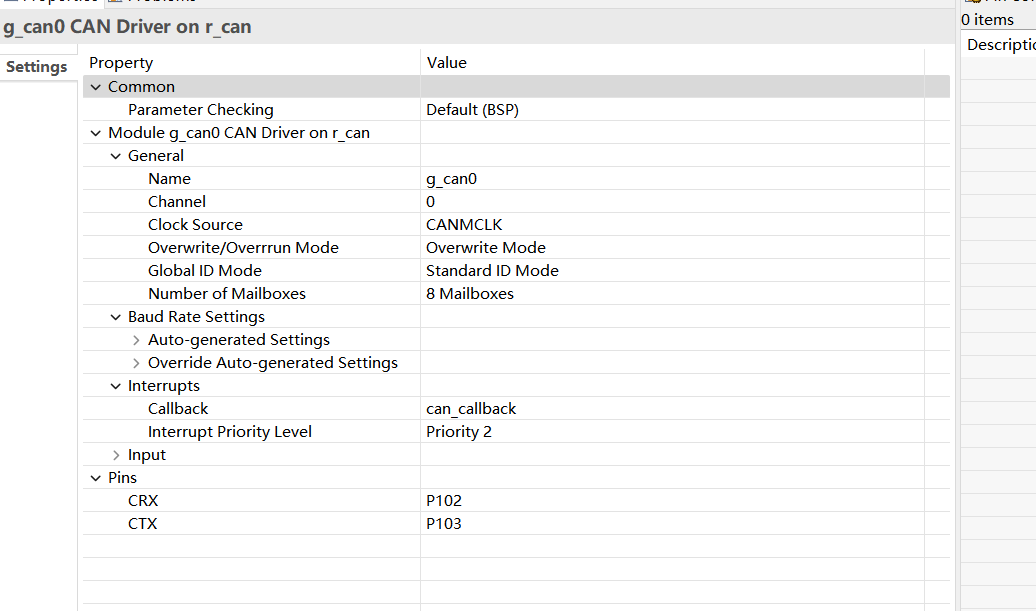
CAN配置
生成代码后添加外部时钟初始化
void CLK_Init (void)
{
/* Define the units to be used with the software delay function */
const bsp_delay_units_t bsp_delay_units = BSP_DELAY_UNITS_MILLISECONDS;
/* Unlock CGC and LPM protection registers. */
R_SYSTEM->PRCR = 0xA503;
/* Configure main oscillator drive. */
// R_SYSTEM->MOMCR = 0x00;
R_SYSTEM->MOMCR = 0x40;
/* Set the main oscillator wait time. */
R_SYSTEM->MOSCWTCR = 0x09;
R_SYSTEM->MOSCCR = 0U;
/* Wait for main oscillator to stabilize. */
FSP_HARDWARE_REGISTER_WAIT(R_SYSTEM->OSCSF_b.MOSCSF, 1U);
/* Lock CGC and LPM protection registers. */
R_SYSTEM->PRCR = 0xA500;
R_BSP_SoftwareDelay(10, bsp_delay_units);
}
在CAN初始化之前调用void CLK_Init (void) 函数。
搭建测试环境
硬件上把CLKOUT和EXTAL相连接。
把CANH、CANL连接到CAN板的CANH、CANL。
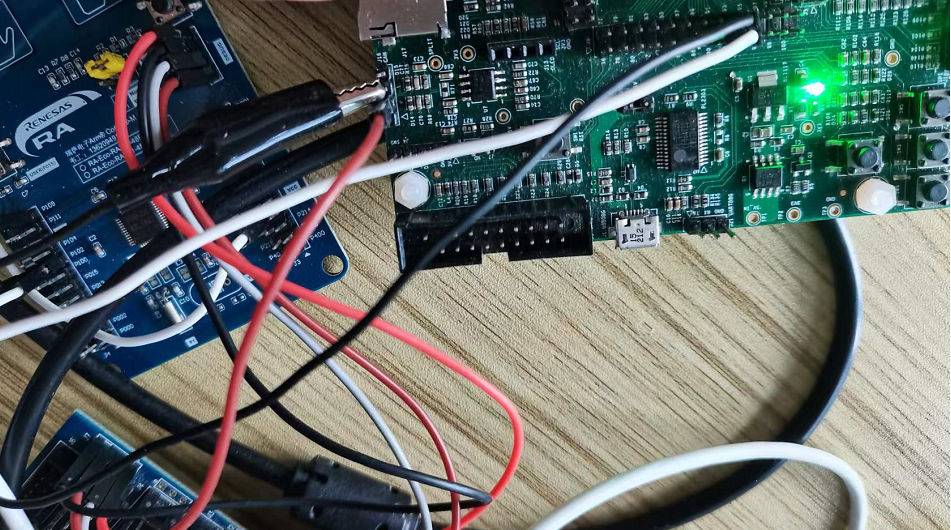
打开CAN的上位机发送接收数据。

显示接收发送都成功,接收帧和程序里面一样。
结论
CLKOUT输出时钟代替外部晶振,可以驱动CAN,节省一个外部晶振。
编辑:黄飞
-
基于瑞萨R7FA2L1AB2DFL单片机的水位检测器制作方案2026-03-26 7174
-
【瑞萨RA2L1入门学习】+开箱评测2025-03-09 1024
-
【瑞萨RA2L1入门学习】00. 开箱 + 点灯2025-03-07 1542
-
基于瑞萨R7FA2E1A72DFL的可触摸灯带控制器设计2024-11-29 2169
-
RA2L1:使用CLKOUT给MCU CAN模块提供时钟2023-11-02 2000
-
基于瑞萨R7FA2E1A52DFL MCU的触控系统设计与J-link仿真2023-09-26 3690
-
基于瑞萨RA系列R7FA2E1A72DFL MCU实现家用电熨斗方案2023-09-19 1895
-
RA2L1定时器中断2022-11-15 2106
-
项目 | 瑞萨RA2L1--电子时钟2022-01-11 3891
-
瑞萨e2studio----RA2L1通过传感器检测温湿度2022-01-04 3386
-
瑞萨R7FA2L1AB2DFL上手体验(Part1)--IAR+RSA Setting2021-12-18 4771
-
【瑞萨RA2系列开发板体验】初识RA2L1开发板2021-11-29 2535
全部0条评论

快来发表一下你的评论吧 !
