

如何使用RX MCU的多功能定时器连接ABZ相对编码器
控制/MCU
描述
介绍
前面很多的文章已经有介绍过RX系列32位高性能MCU,特别是RX-T系列,如何在电机驱动控制上使用,以及如何实现无感测向量等高性能电机控制技术。
今天我们回头来看一看如何使用RX MCU的多功能定时器(MTU - Multi-function Timer Unit,其实有更多人称之为Motor Timer Unit),连接传统的ABZ相对编码器。
本文章使用了RX671开发板作为例子,使用任何RX系列MCU,操作上也是基本相同的。
内容
1
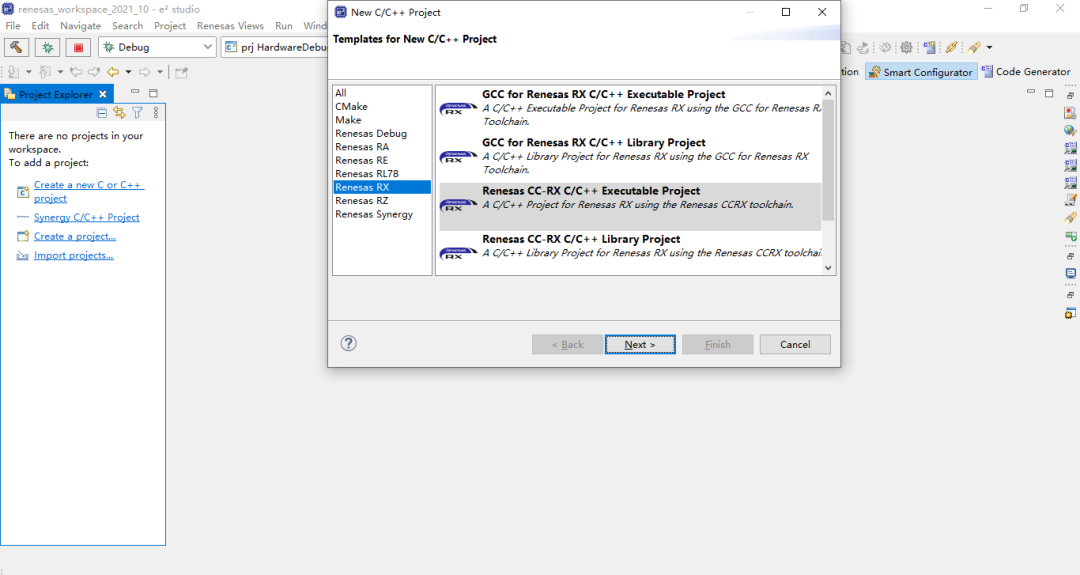
打开e2 studio IDE,创建RX工程,选择Renesas CC-RX C/C++ Executable Project。
2
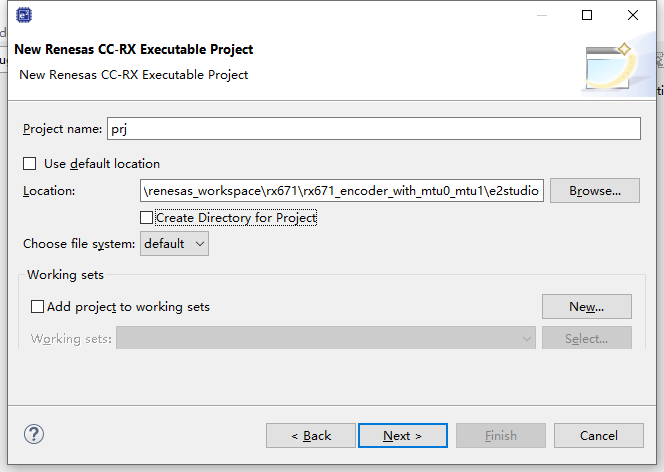
选择工程对应的存储路径,工程命名为“prj”。
3
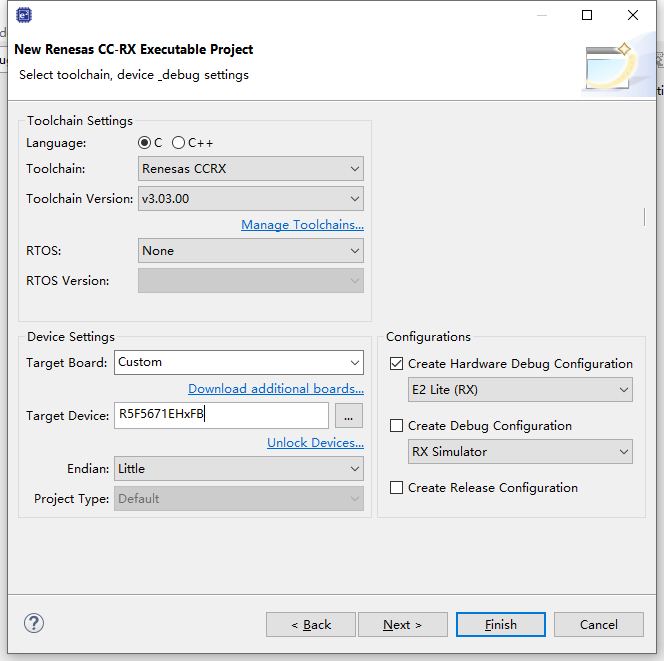
选择最新版本的CCRX Toolchain、对应的芯片型号、仿真器等。
4
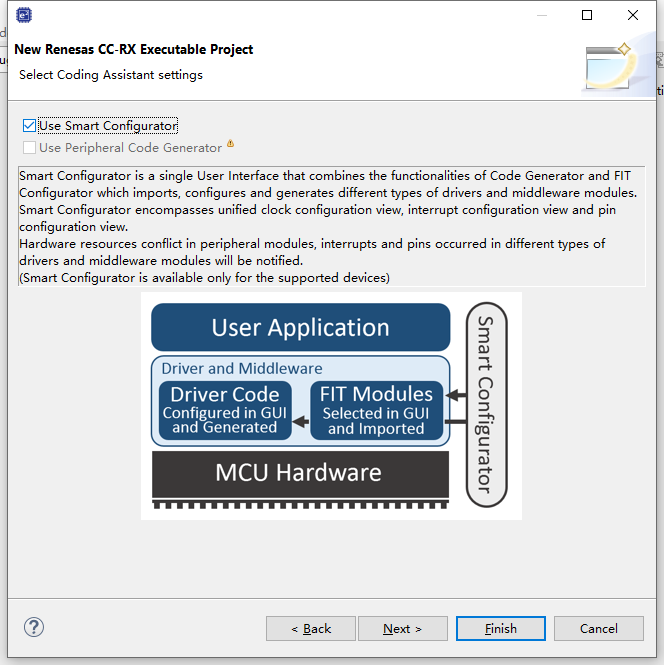
勾选Use Smart Configurator,一直点击“Next”,直到工程创建完成。
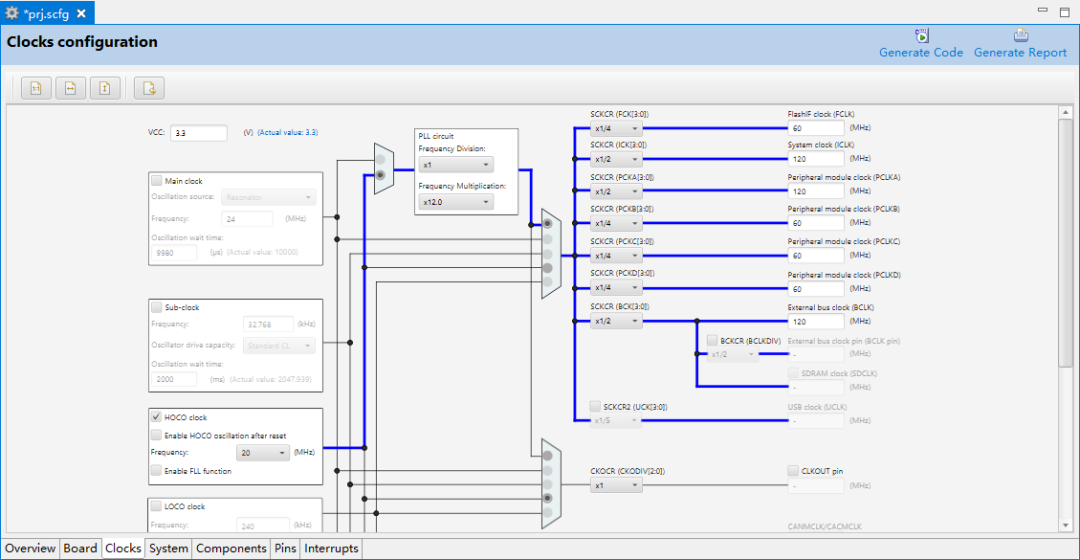
5
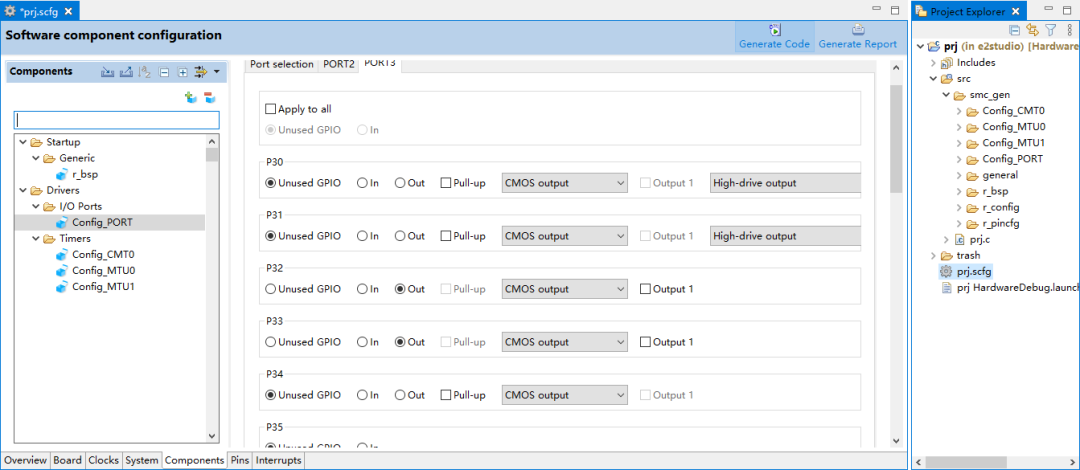
点击prj.scfg,会出现图Smart Configurator操控界面。设置时钟源为HOCO 20MHz,以及后面的分频器也一同设置。
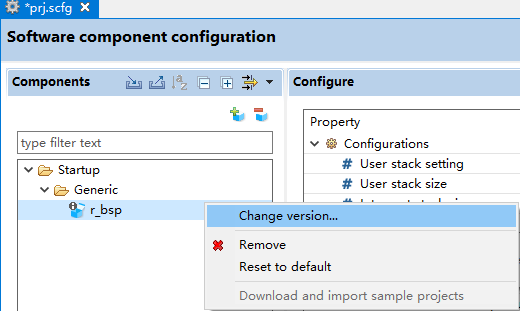
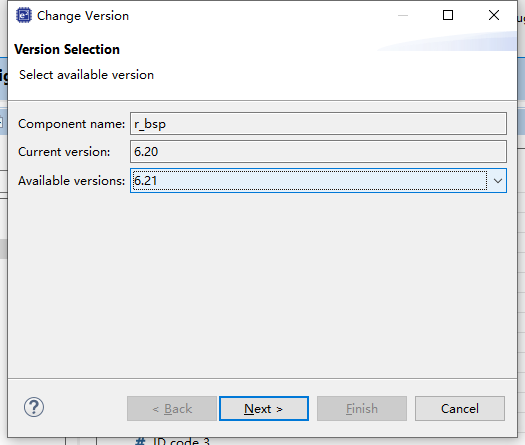
6
更新BSP至最新版本。
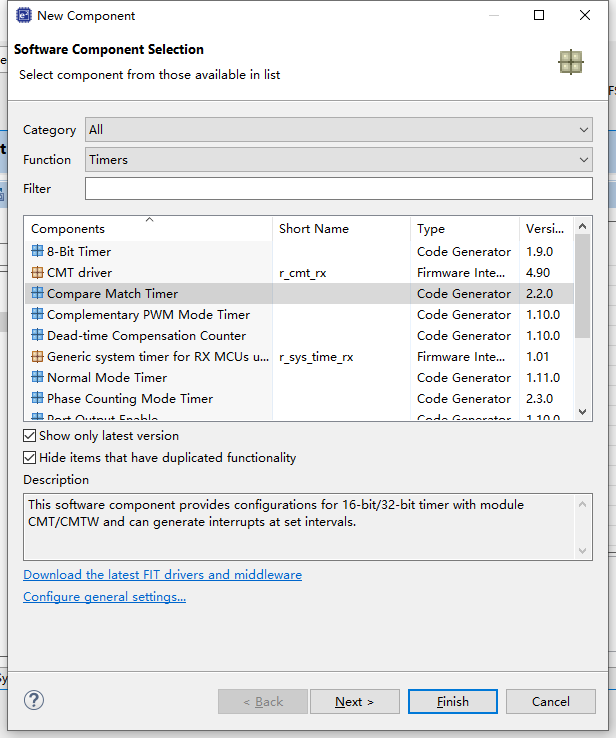
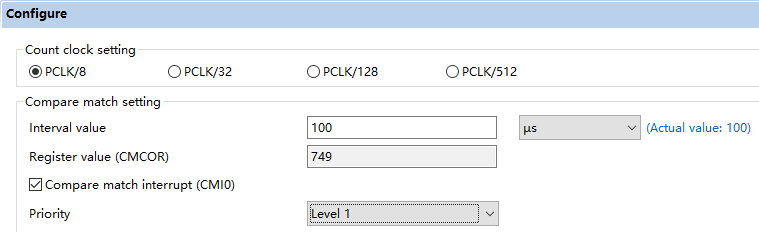
7
为了方便测试,这里会使用MCU中的一个100us定时器产生中断,控制P3.2和P3.3作为模拟编码器的A/B信号输出。
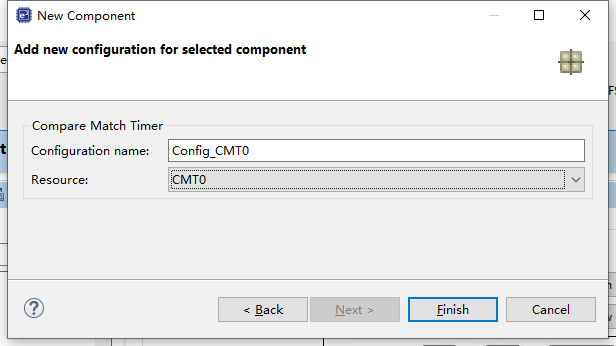
添加CMT 100us定时器中断。
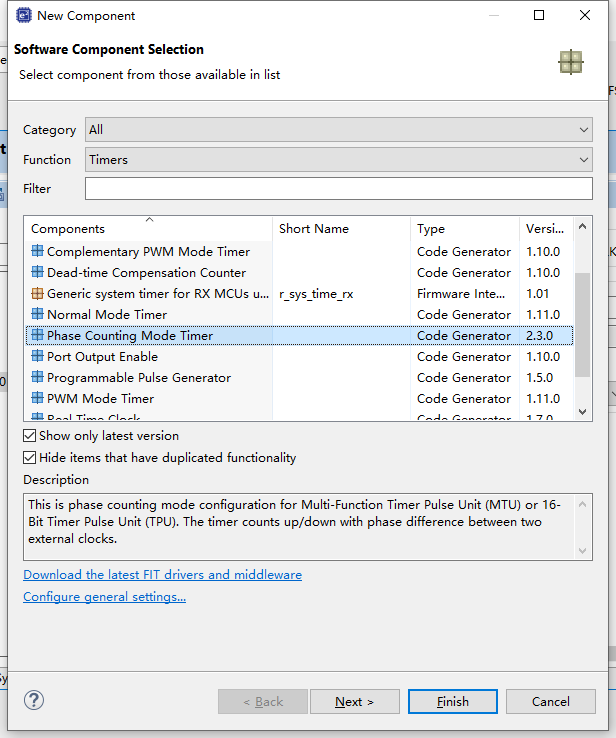
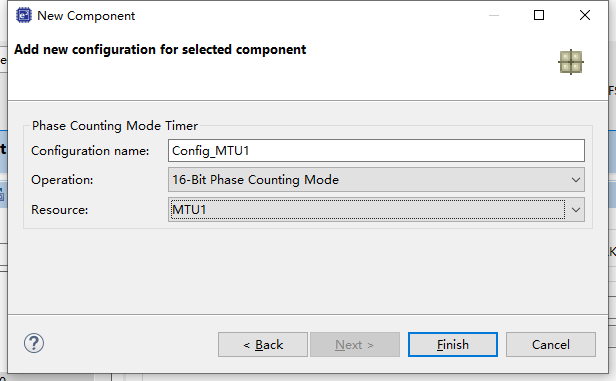
8
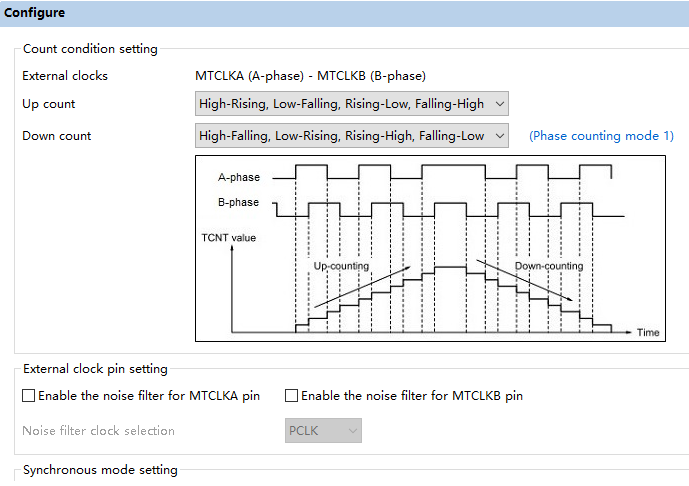
添加MTU1,设置为16-bit Phase Counting Mode Timer,作为编码器A/B信号的输入,具体的参数使用默认值即可。
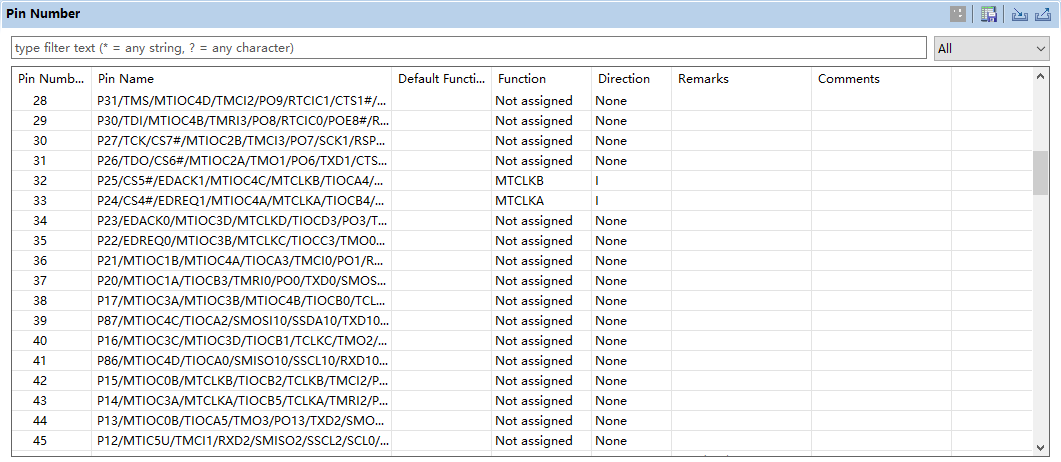
接线方法为编码器A/B信号线连接P2.4 (MTCLKA)/P2.5 (MTCLKB),在无编码器的情况下可以使用P3.2/P3.3作模拟(在CMT0的中断函数,以软件控制P3.2/P3.3)。
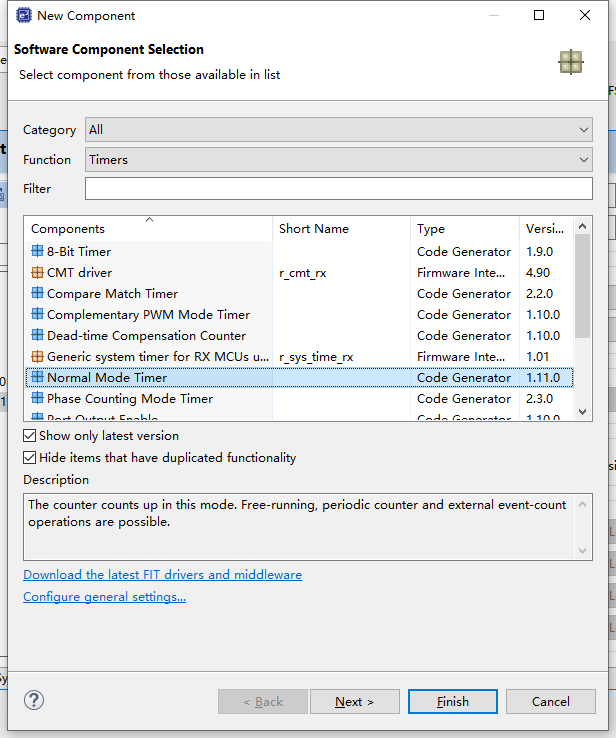
9
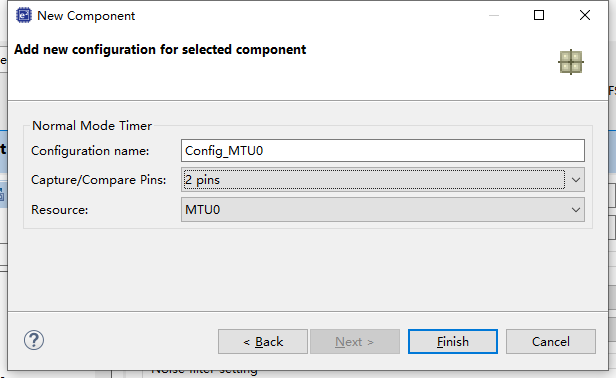
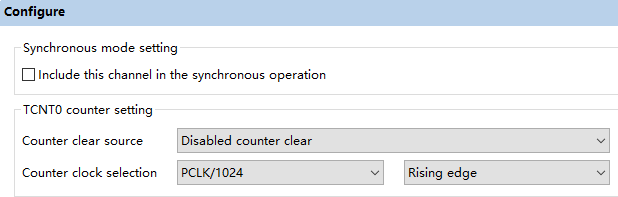
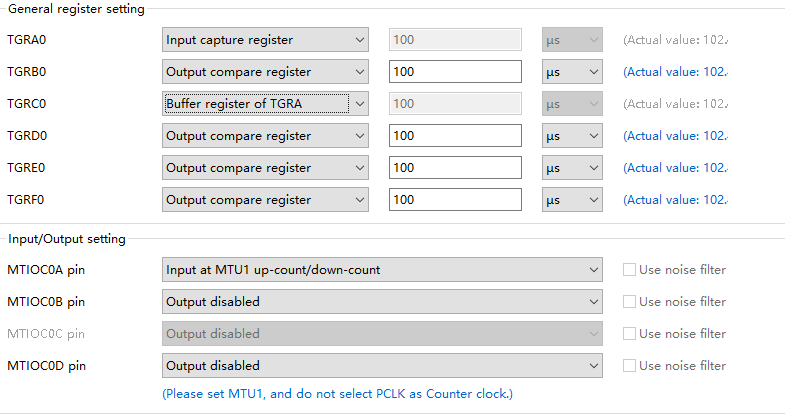
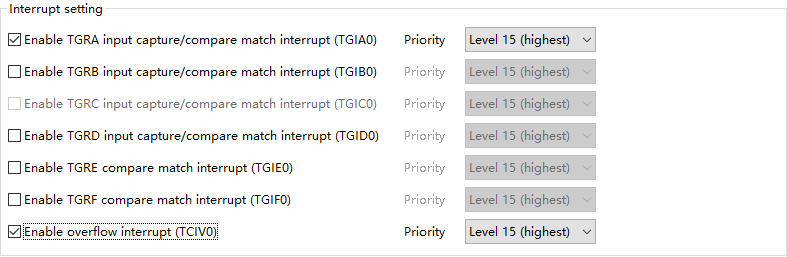
添加MTU0,设置为Normal Mode Timer,使用的是2pins Capture,TGRA0作为输入捕捉计时器,TGRC0用作TGRA0的Buffer。可以设置中断用作调试验证。
10
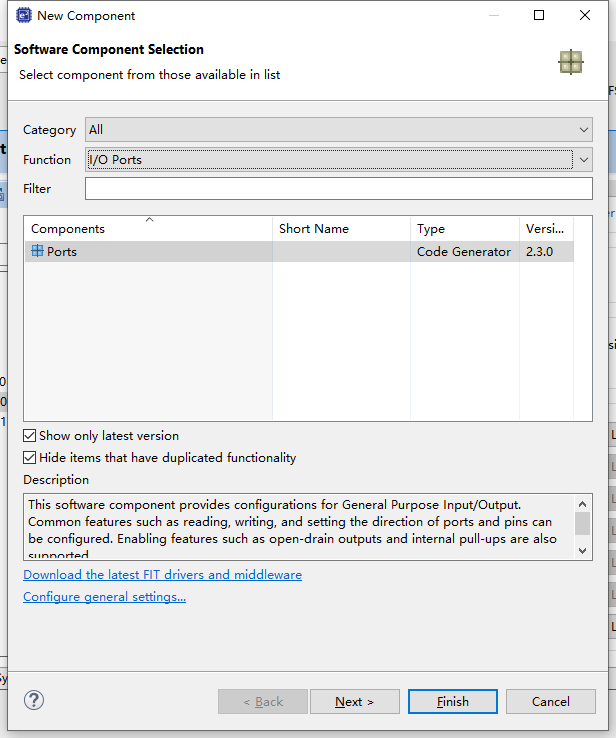
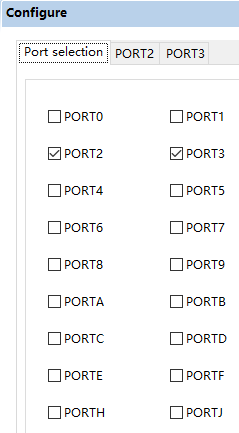
设置IO口P3.2、P3.3作输出,用来模拟编码器的输出信号。使用P2.4、P2.5的上拉电阻。
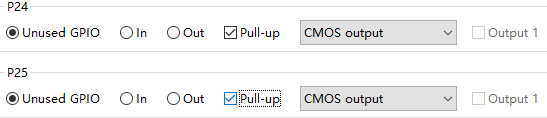
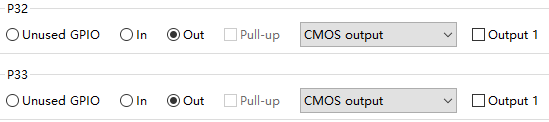
11
配置好底层驱动后,生成代码。
至此完成Smart Configurator配置,后续就是代码部分了:
1
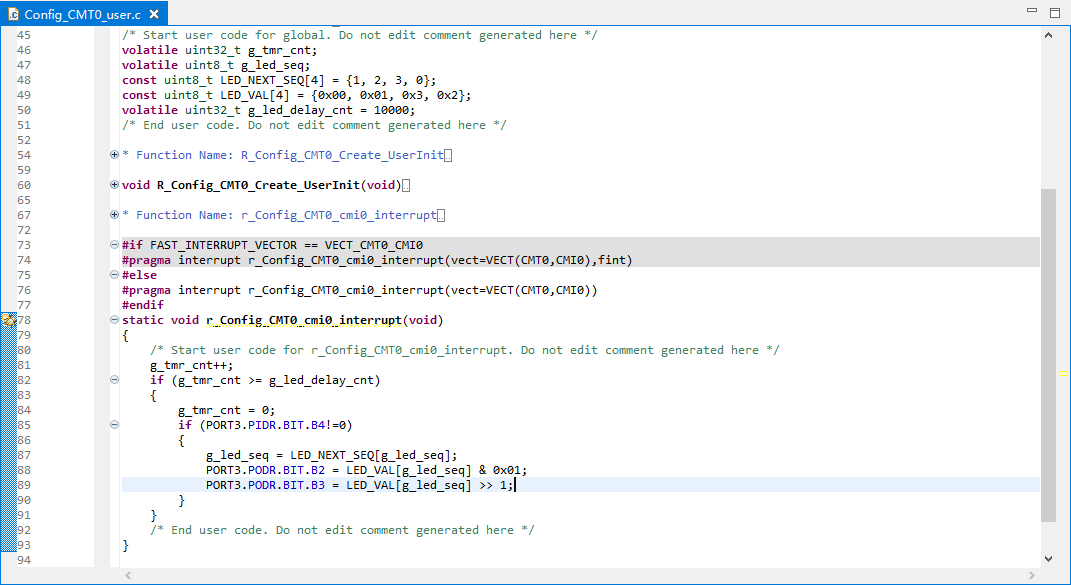
Config_CMT0_user.c,CMT 100us定时器中断程序。
使用P3.2、P3.3作为模拟编码器的信号输出。仿真过程中可以通过修改变量g_led_delay_cnt来改变信号的频率。
接线方法为编码器A/B信号线连接P2.4 (MTCLKA)/P2.5 (MTCLKB),在无编码器的情况下可以使用P3.2/P3.3作模拟。
2
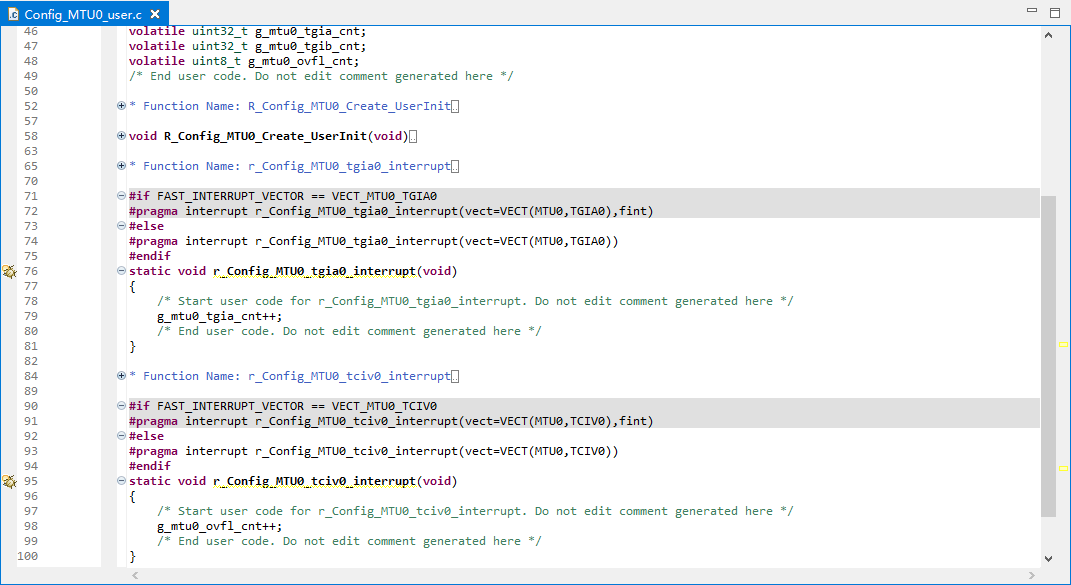
Config_MTU0_user.c,使用MTU0捕捉中断和溢出中断,用来作调试验证用,实际使用时可以取消。
3
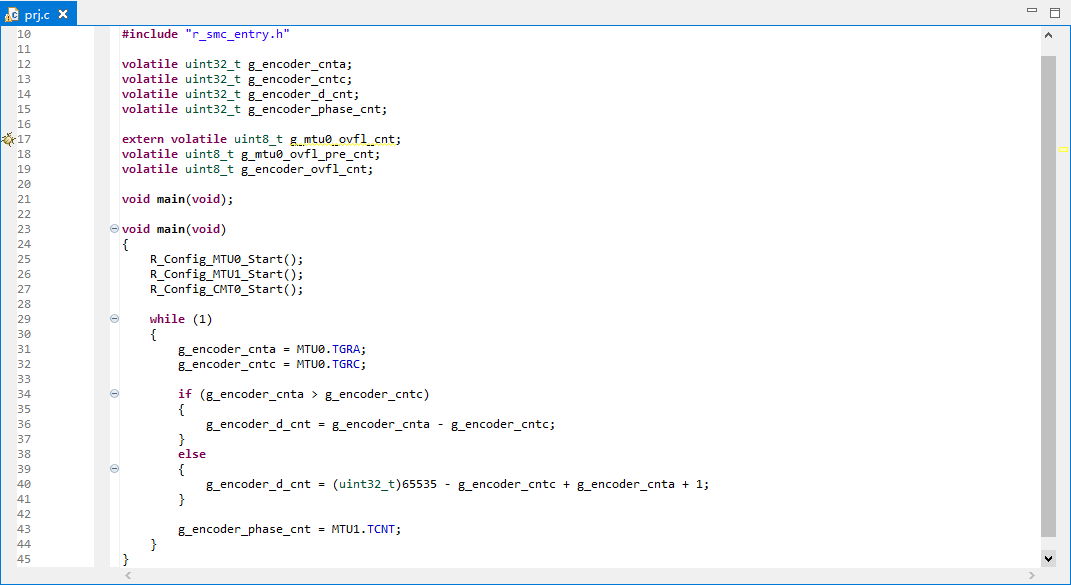
prj.c,主程序。实现简单的循环读取编码器脉冲计数值与定时器值。
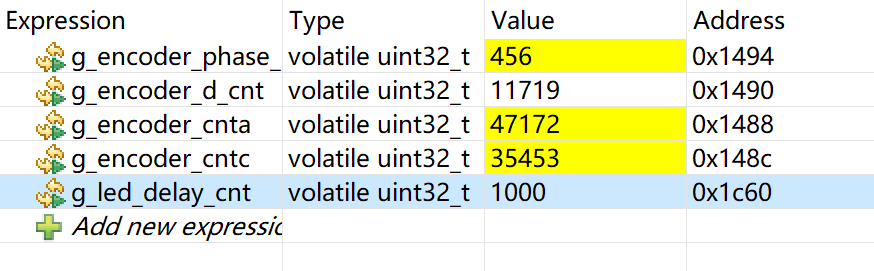
开始仿真测试,测试结果如下:
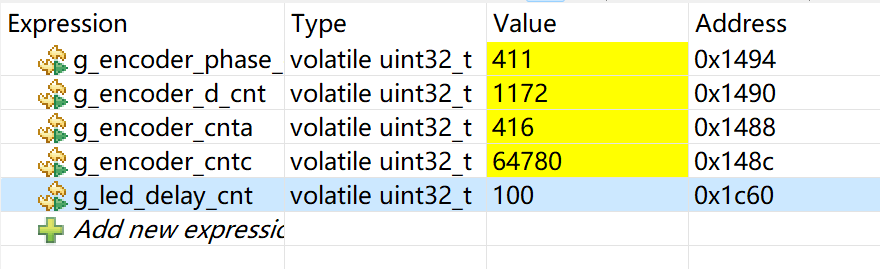
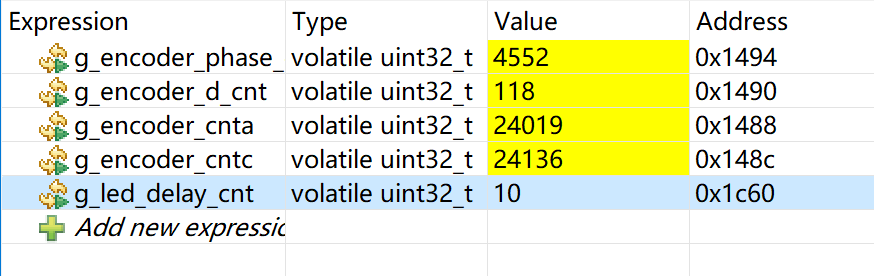
通过调整g_led_delay_cnt数值模拟不同频率下的脉冲输入。
当g_led_delay_cnt=1000时:
当g_led_delay_cnt=100时:
当g_led_delay_cnt=10时:
编辑:黄飞
-
电机控制基础3——定时器编码器模式使用与转速计算2021-08-30 16845
-
定时器是不是有编码器输入功能?2025-03-11 372
-
请问STM32单片机和 ABZ三相接口的编码器该怎么连接?2018-05-21 15152
-
stm32定时器编码器模式2021-08-09 2255
-
关于定时器编码器的应用2021-08-19 1347
-
如何去编写定时器接编码器的程序呢2021-11-15 2381
-
使用定时器的编码器功能采集旋转编码器的信号并处理2022-01-12 1268
-
请问单片机如何模拟编码器ABZ脉冲?2023-09-26 740
-
实用多功能定时器电路图2008-11-07 4654
-
多功能定时器电路制作2012-07-20 22533
-
STM32F103-定时器编码器模式和高级定时器输出互补的PWM信号2022-01-14 1429
-
STM32F407定时器编码器模式简介2022-03-31 10355
-
使用MCU连接旋转编码器的方法2022-05-09 7722
-
详解stm32定时器的编码器模式2023-01-19 12847
-
STM32CubeMx定时器编码器模式基本使用方法2023-06-01 7626
全部0条评论

快来发表一下你的评论吧 !
