

利用脉冲沿可以帮助程序更加稳定
电子说
描述
今天给各位学员分享小文老师的开发经验:
关于如何更好的使用P_TRIG和N_TRIG指令。
P_TRIG:扫描信号上升沿
N_TRIG:扫描信号下降沿
一、沿的用法
其实在博图内,沿的用法有很多种,如下图:

但是小文老师更青睐于我们讲的这两款,主要有点在以下:
1、沿触发之前可以使用多个逻辑,形成沿触发
2、可以更加直观的看到沿是“TRUE”或者“FLASE”的状态,判断逻辑

我们先来说一下,哪些开发的情况下会使用这两个指令?
其实就是在写步进程序的时候,对于步数的转化,会使用沿指令; 还有在我们外部信号触发,例如你的传感器,可能会发生抖动,抖动严重的会导致制程序紊乱,对于这种抖动,我们采用“滤波”+“P_TRIG”,看下图:
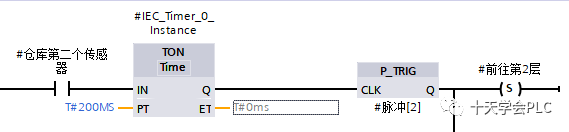
传感器闭合后,为了防止是误触发,采用一个定时器,定时器为200毫秒,当传感器的信号到达200毫秒后,触发沿,沿转移到下一个步序,这样的话,尽管你的传感器一直在抖动,也能有效的隔离在后面的判断逻辑之外,从而尽可能减小对程序的影响。

这是我在使用时的一些心得,当然也可以用于上电复位,上电后,或者调用FB后,用第一个扫描周期的沿,复位所有的状态和输出,保证我们每次使用FB时都是初始化过的FB!
二、避免用错沿 在使用时,P_TRIG的下方一般会有一个镜像寄存器,用来判断指令是否触发,如下图:
我们可以在DB中建立一个Array的数据类型,其中元素可以指定为20,个或者更多,属性为Bool型,也就是你有20个Bool类型的寄存器可以使用:
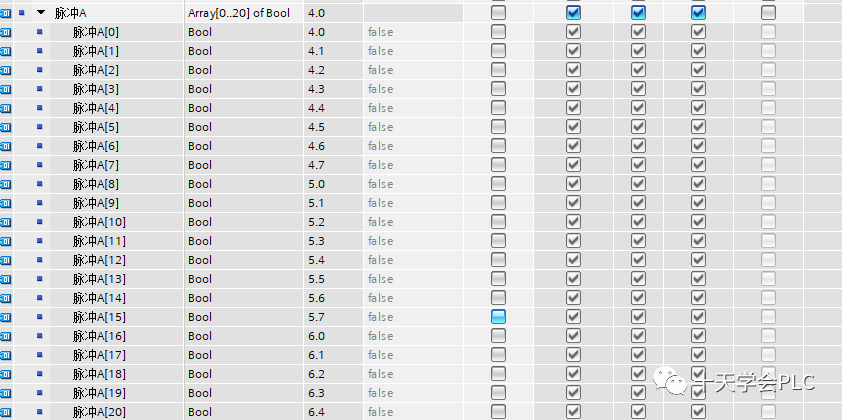
每次需要使用的时候,直接拖拽即可!非常方便,步进程序一步步往下写的话,很方便调用,也不担心用重复导致的动作不执行。
总结,更好的利用脉冲沿,可以帮助程序更加稳定,同时掌握良好的编程规则和习惯,有助于我们开发更为复杂的自动化系统!
审核编辑:刘清
-
M451的GPIO可以设置成脉冲上升沿或下降沿中断吗?2019-01-08 0
-
可由输入脉冲前、后沿触发的单稳态多谐振荡器2009-03-29 393
-
脉冲前、后沿检波器2009-04-11 775
-
脉冲信号测量程序2016-08-17 1548
-
VHDL同步整形电路(上升沿触发)程序2016-11-11 1270
-
同步整形电路(下降沿触发)VHDL程序2016-11-11 1048
-
一种快沿脉冲信号发生器的设计2017-11-14 1661
-
MCU是如何统计脉冲信号输入个数的呢?2023-01-09 2226
-
如何使用西门子1200的脉冲指令?2023-05-23 15389
-
为什么脉冲数字信号的波形中其上升沿和下降沿展开后会有边沿震荡2024-02-06 1751
全部0条评论

快来发表一下你的评论吧 !
