

CMSIS_V1和CMSIS_V2有什么区别呢?该怎么选择呢?
电子说
1.4w人已加入
描述
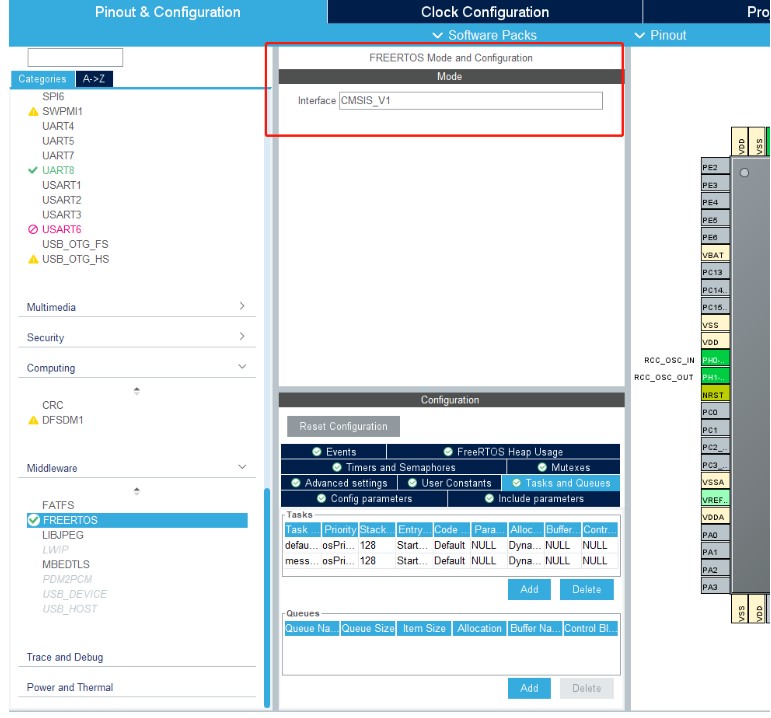
STM32CubeIDE在stm32开发者起着最基础的作用,在STM32CubeIDE中配置FreeRTOS中间层时需要选择interface,其中有三个选项:Disable、CMSIS_V1和CMSIS_V2
CMSIS定义了通用工具接口,并提供一致的设备支持,那么CMSIS_V1和CMSIS_V2有什么区别呢,该怎选择呢?
微控制器软件接口标准CMSIS
CMSIS ARM官方定义如下:
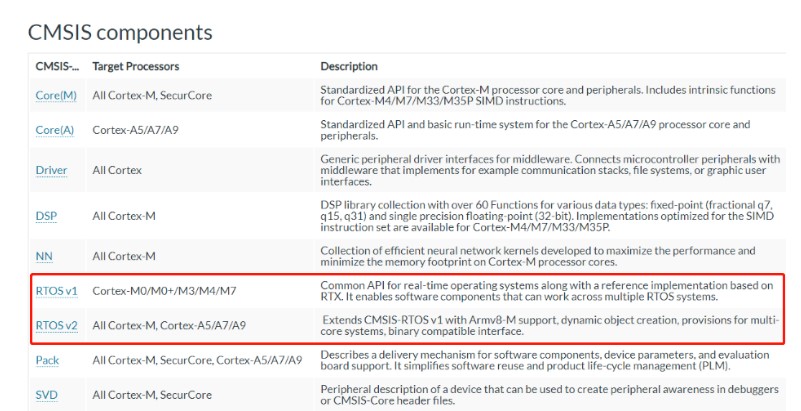
Cortex微控制器软件接口标准(CMSIS)是独立于供应商的硬件抽象层,用于基于Arm Cortex处理器的微控制器,并且CMSIS提供了到处理器和外围设备,实时操作系统以及中间件组件的接口,可以说非常实用。
CMSIS软件接口简化了软件重用,减少了开发周期,而且也不受限操作系统的类型,去耦。
不同之处
RTOS v1使得软件能够在不同的实时操作系统下运行(屏蔽不同RTOS提供的API的差别)
而RTOS v2则是拓展了RTOS v1,兼容更多的CPU架构和实时操作系统。
RTOS v1创建任务函数如下:
/*********************** Thread Management *****************************/
/**
* @brief Create a thread and add it to Active Threads and set it to state READY.
* @param thread_def thread definition referenced with
ef osThread.
* @param argument pointer that is passed to the thread function as start argument.
* @retval thread ID for reference by other functions or NULL in case of error.
* @note MUST REMAIN UNCHANGED: osThreadCreate shall be consistent in every CMSIS-RTOS.
*/
osThreadId osThreadCreate (const osThreadDef_t *thread_def, void *argument)
{
TaskHandle_t handle;
#if( configSUPPORT_STATIC_ALLOCATION == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
if((thread_def->buffer != NULL) && (thread_def->controlblock != NULL)) {
handle = xTaskCreateStatic((TaskFunction_t)thread_def->pthread,(const portCHAR *)thread_def->name,
thread_def->stacksize, argument, makeFreeRtosPriority(thread_def->tpriority),
thread_def->buffer, thread_def->controlblock);
}
else {
if (xTaskCreate((TaskFunction_t)thread_def->pthread,(const portCHAR *)thread_def->name,
thread_def->stacksize, argument, makeFreeRtosPriority(thread_def->tpriority),
&handle) != pdPASS) {
return NULL;
}
}
#elif( configSUPPORT_STATIC_ALLOCATION == 1 )
handle = xTaskCreateStatic((TaskFunction_t)thread_def->pthread,(const portCHAR *)thread_def->name,
thread_def->stacksize, argument, makeFreeRtosPriority(thread_def->tpriority),
thread_def->buffer, thread_def->controlblock);
#else
if (xTaskCreate((TaskFunction_t)thread_def->pthread,(const portCHAR *)thread_def->name,
thread_def->stacksize, argument, makeFreeRtosPriority(thread_def->tpriority),
&handle) != pdPASS) {
return NULL;
}
#endif
return handle;
}
RTOS v2创建任务函数如下:
osThreadId_t osThreadNew (osThreadFunc_t func, void *argument, const osThreadAttr_t *attr) {
const char *name;
uint32_t stack;
TaskHandle_t hTask;
UBaseType_t prio;
int32_t mem;
hTask = NULL;
if (!IS_IRQ() && (func != NULL)) {
stack = configMINIMAL_STACK_SIZE;
prio = (UBaseType_t)osPriorityNormal;
name = NULL;
mem = -1;
if (attr != NULL) {
if (attr->name != NULL) {
name = attr->name;
}
if (attr->priority != osPriorityNone) {
prio = (UBaseType_t)attr->priority;
}
if ((prio < osPriorityIdle) || (prio > osPriorityISR) || ((attr->attr_bits & osThreadJoinable) == osThreadJoinable)) {
return (NULL);
}
if (attr->stack_size > 0U) {
/* In FreeRTOS stack is not in bytes, but in sizeof(StackType_t) which is 4 on ARM ports. */
/* Stack size should be therefore 4 byte aligned in order to avoid division caused side effects */
stack = attr->stack_size / sizeof(StackType_t);
}
if ((attr->cb_mem != NULL) && (attr->cb_size >= sizeof(StaticTask_t)) &&
(attr->stack_mem != NULL) && (attr->stack_size > 0U)) {
mem = 1;
}
else {
if ((attr->cb_mem == NULL) && (attr->cb_size == 0U) && (attr->stack_mem == NULL)) {
mem = 0;
}
}
}
else {
mem = 0;
}
if (mem == 1) {
#if (configSUPPORT_STATIC_ALLOCATION == 1)
hTask = xTaskCreateStatic ((TaskFunction_t)func, name, stack, argument, prio, (StackType_t *)attr->stack_mem,
(StaticTask_t *)attr->cb_mem);
#endif
}
else {
if (mem == 0) {
#if (configSUPPORT_DYNAMIC_ALLOCATION == 1)
if (xTaskCreate ((TaskFunction_t)func, name, (uint16_t)stack, argument, prio, &hTask) != pdPASS) {
hTask = NULL;
}
#endif
}
}
}
return ((osThreadId_t)hTask);
}
正常V1够用了,普通功能选V1,高级功能选择V2:
我分别选择CMSIS_V1和CMSIS_V2编译了两次进行对比,CMSIS_V2都要大一些。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 微控制器
- 处理器
- CMSIS
- stm32cubemx
-
Nano100B Series BSP_CMSIS_V3.02.000包里的I2C_Loopback示例时失败了怎么解决?2024-01-16 560
-
CMSIS-RTOS V1与V2的区别是什么?2024-04-11 2351
-
微控制器软件接口标准 (CMSIS) 有何作用呢2021-11-30 3543
-
如何让CMSIS RTOS V1在应用程序中与CMSIS RTOS V2集成呢?2022-12-12 649
-
M051别使用不同的CMSIS版本, 该如何选择呢?2023-08-25 595
-
GD32_CMSIS_DAP2016-07-29 1303
-
FPGA和单片机有什么区别呢?2017-02-11 43591
-
使用与MQX CMSIS-DSP算法2017-09-07 1330
-
MQX CMSIS-DSP算法应用2017-09-29 788
-
基于MQX CMSIS-DSP算法应用2017-10-09 922
-
CMSIS_V1和CMSIS_V2有什么区别呢,该怎选择呢?2022-09-06 4844
-
CMSIS-RTOS是什么?2023-04-11 2672
-
EML与DML:有什么区别?该如何选择?2023-06-30 5063
-
type-c和普通接口有什么区别呢?2023-07-28 8917
全部0条评论

快来发表一下你的评论吧 !
