

磁链观测器在异步电机矢量控制中的应用
工业控制
描述
导读:本期文章主要是介绍电压型磁链观测器和电流型磁链观测器。两种磁链观测器运用到异步电机矢量控制中,外环磁链环用磁链观测器形成闭环,分析电压型和电流型磁链观测器的观测性能。
一、研究背景及意义
磁链估计是高性能交流感应电机调速系统中的重要组成部分。而磁链在实际应用中一般不用传感器直接检测,所以现代交流电力传动控制系统常用磁链估计模型来估算磁链。在电机运行过程中,要考虑磁饱和、温度等干扰信号对电机参数造成偏差的影响,所以如何在电机全速范围内获得准确的磁链即提高磁链观测器的参数鲁棒性成为众多学者的研究内容。
转子磁链观测器利用定子电压、定子电流或转子转速信号观测出转子磁链的相位和幅值。如果转子磁链的相位观测不准,那么定子电流的励磁分量与转矩分量就不能实现完全的解耦,可能会造成系统的振荡甚至不稳定。如果观测出转子磁链的幅值偏大,会使得电机运行在弱磁状态,减小电机的带载能力;如果观测出转子磁链的幅值偏小,会导致过大的励磁电流,使电机的铁心饱和,严重时还会导致绕组过热而烧坏电机。因此决定整个矢量控制系统性能优劣的最为关键环节就是转子磁链观测器。
二、开环转子磁链观测器
2.1、电压型磁链观测器
在静止坐标系下基于电压模型的转子磁链向量表达式如下:
从上式可以发现电压型观测器具有以下特点:
(1)该模型与转子电阻Rr无关,且不需要电机转速 信息,适合用于无速度传感器矢量控制;
(2)包含一纯积分项,被积项的初始相位与直流偏置都会影响积分结果;
(3)低速时观测器性能较差。因为低速时给定的定子电压幅值小,电机端电压难以精确获得,定子电阻的阻值在运行过程中又会发生变化,使得被积项产生明显的相对误差。
针对电压模型磁链观测器包含纯积分环节和低速性能差的问题,主要有三个改进措施:
(1) 采用其他环节来替换纯积分环节,例如用一阶低通滤波环节,针对一阶低通滤波环节会带来幅值和相位的误差以及无法消除直流偏置影响的问题,现有文献提出了许多改进型的积分器;
(2)对逆变器的非线性误差电压进行补偿。逆变器的驱动信号中存在的死区时间、开关管的导通压降和开通关断时间都会使得逆变器的参考电压和实际输出电压产生一定误差,尤其在低速时,由于给定电压的幅值小,重构的定子电压与实际值的相对误差变得尤为明显。如何尽可能地减少给定电压与逆变器输出实际电压的误差不单是电压模型磁链观测器的问题,这是所有用到定子电压的磁链观测器共性问题。
(3)加入定子电阻的在线辨识,使得在控制系统的运行过程中定子电阻参数能够跟随其实际值变化。
2.2、电流型磁链观测器
静止坐标系下的基于电流模型的转子磁链向量表达式如下:
从上式可以发现电流型观测器具有以下特点:
(1)需要实测的定子电流和转速信号,不需要定子电压信号;
(2)包含转子时间常数与互感Lm参数,当电机温升和磁路饱时会对这些参数产生较大影响;
(3)不包含纯积分环节,故其观测值是渐进收敛的。
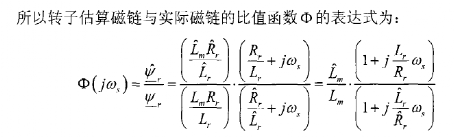
三、敏感性分析
3.1、基于电流型磁链观测器的参数敏感性分析
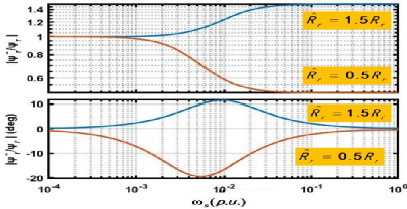
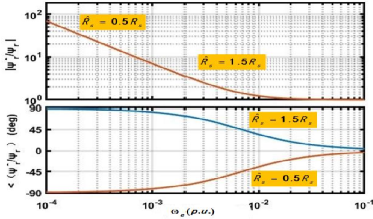
图(1)转子电阻取0.5和1.5倍时基于电流型的磁链比值函数的波特图
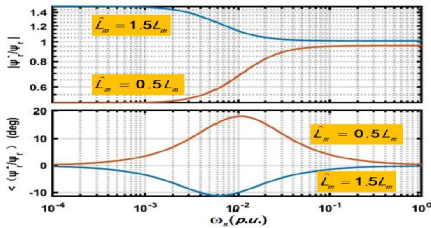
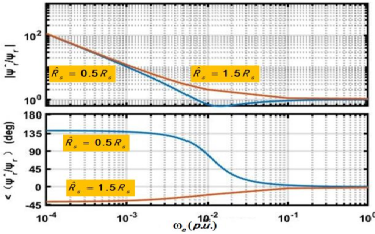
图(2)互感取0.5和1.5倍时基于电流型的磁链比值函数的波特图
(1)、基于电流模型的转子磁链观测器不受定子电阻 偏差的影响;
偏差的影响;
(2)、基于电流模型的转子磁链观测器在空载时对转子电阻偏差不敏感,但随着负载的增大,对转子电阻偏差的敏感性提高;
(3)、基于电流模型的转子磁链观测器对互感的偏差较敏感。
3.2、基于电压型磁链观测器的参数敏感性分析

图(3)定子电阻取0.5和1.5倍空载时基于电压型的磁链比值函数的波特图
图(4)定子电阻取0.5和1.5倍满载时基于电压型的磁链比值函数的波特图
(1)、基于电压模型的转子磁链观测器不受电机转子电阻偏差的影响;
(2)、在低速段,基于电压模型的转子磁链观测器对定子电阻的偏差十分敏感,定子电阻的偏差会导致转子磁链的估计值出现较大的幅值和相位误差;在中、高速段,基于电压模型的转子磁链观测器对定子电阻的偏差不敏感。
(3)基于电压模型的转子磁链观测器对互感的偏差不敏感。
3.2、小结
现有参考文献中对电压模型和电流模型磁链观测器的参数敏感性分析,综合来看,电流模型不需要电压信号且不包含纯积分环节,更适合低速运行状态;电压模型里不包含转子电阻,电机参数鲁棒性更强,因此中、高速时性能优于电流模型。为了充分利用两种模型的优点,可以将两种模型结合起来,在低速时采用电流模型,在中、高速时采用电压模型。下面介绍一种电压电流混合模型转子磁链观测器。(暂定)
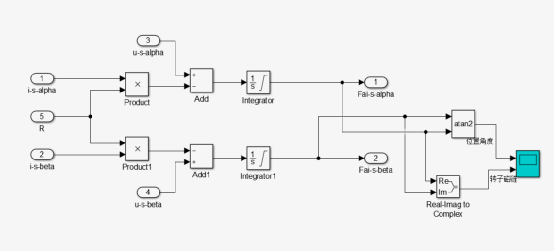
四、仿真建模
这次异步电机矢量控制系统仿真共有三个,主体仿真框架一样,主要改变磁链估计模块。本期文章主要介绍三种磁链估计方式,一种是旋转坐标系下的转子磁链估计、另外两种是静止坐标系下的电流型磁链观测器和电压型磁链观测器。
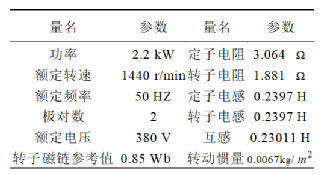
4.1电机参数
4.2电机运行的工况
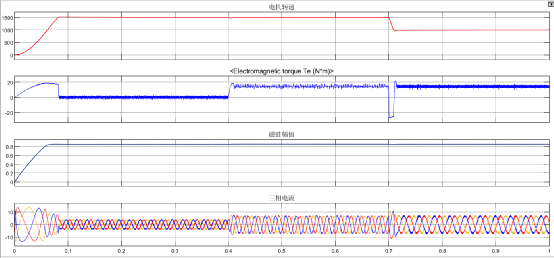
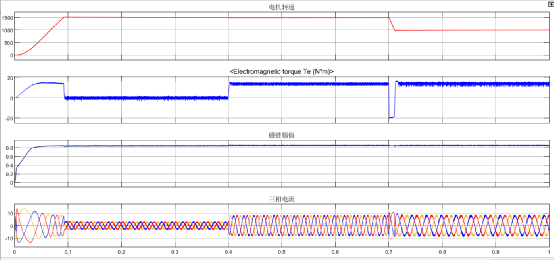
仿真中异步电机的参数如上表所示。仿真运行的采样率为5K,在0.7秒前,速度参考值设为1500r/min,在0.7秒后参考速度设置为1000r/min(中高速区域),低速区域设为300r/min后降到150r/min(低速区域)。在0.4秒前,电机空载,在0.4秒之后给电机加14N.m的负载。
4.3仿真波形分析
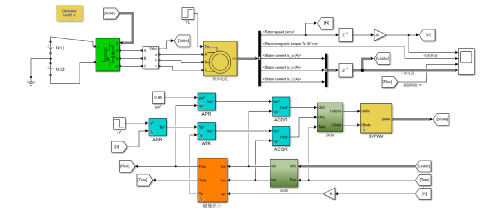
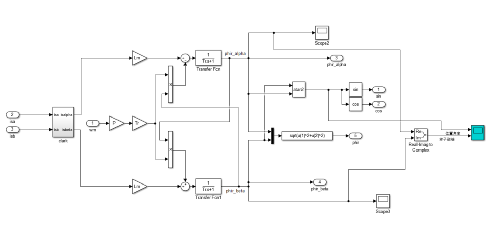
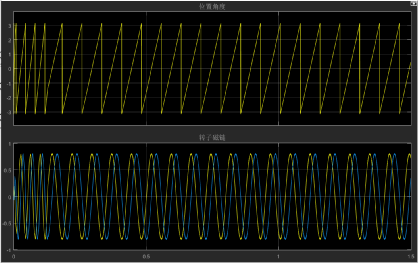
图4-1异步电机矢量控制系统仿真(旋转坐标系下的转子磁链估计)

图4-2仿真搭建
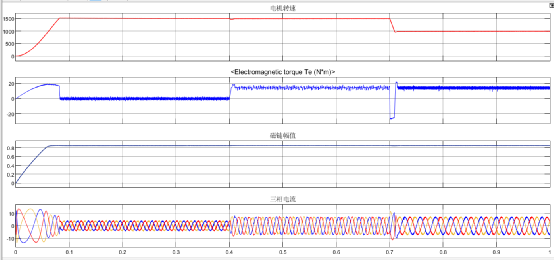
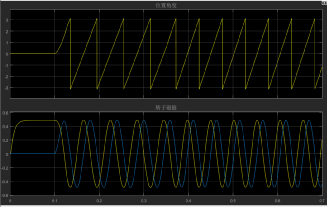
高速区域
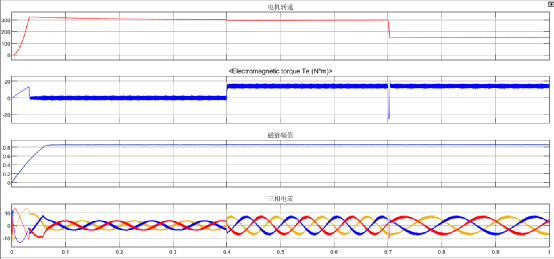
图4-3仿真波形变化情况(低速区域)
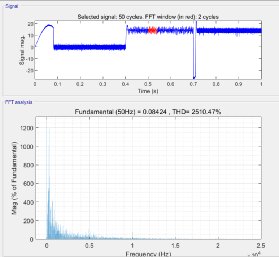
图4-4 FFT分析
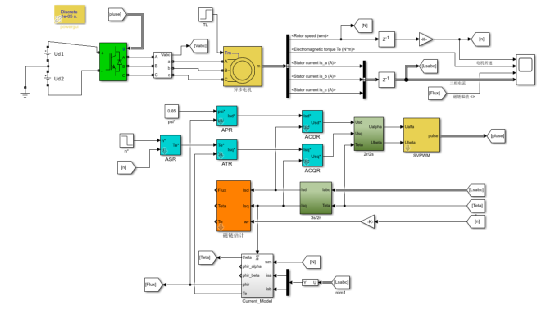
图4-5异步电机矢量控制系统仿真(静止坐标系下的电流型磁链观测器)

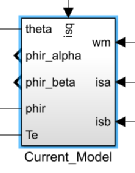
图4-6仿真搭建
高速区域
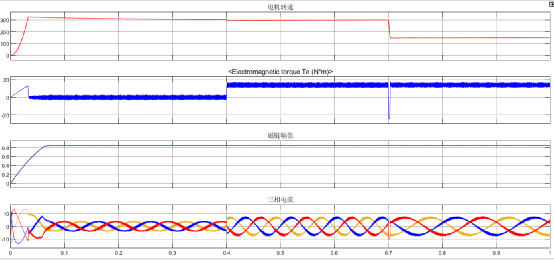
图4-7仿真波形变化情况(低速区域)
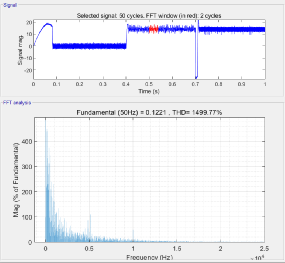
图4-8 FFT分析
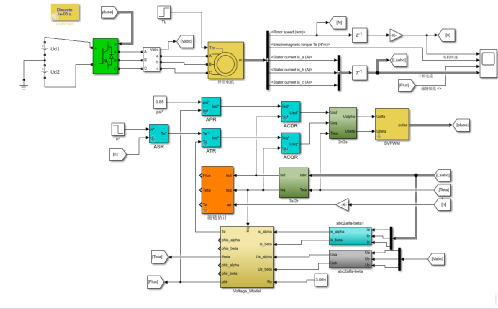
图4-9异步电机矢量控制系统仿真(静止坐标系下的电压型磁链观测器)

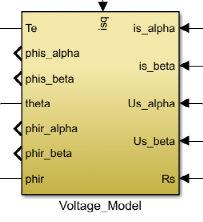
图4-10仿真搭建
(高速区域)
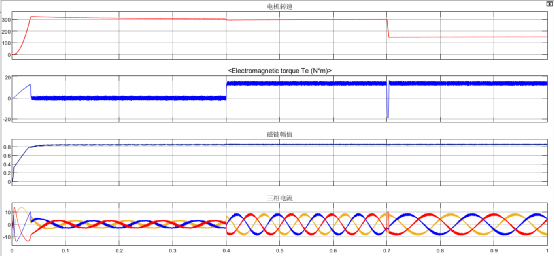
图4-11仿真波形变化情况(低速区域)
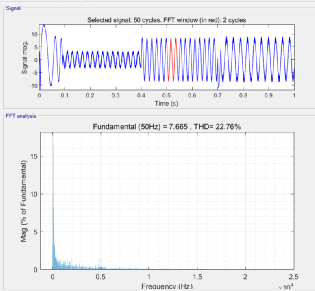
图4-12仿真波形变化情况
4.4总结
从上节仿真分析可知:在高速带载运行区域时,电压型磁链观测器并到磁链环中转矩纹波更小。在低速运行区域,电流型磁链观测器具有更好的观测器性能。
综上可知:在低速区域时,电流型磁链观测器具有更好的观测优势;在中高速区域,电压型磁链观测器具有更好的观测优势。后期文章将介绍电压电流混合模型磁链观测器,在全速范围内进行稳定观测,提高电机的控制性能。
审核编辑:汤梓红
-
显著改善异步电机动态性能的磁链观测方法2025-07-15 396
-
基于全阶模型磁链观测器的异步电机矢量控制2023-11-09 3333
-
异步电机速度估计-混合模型磁链观测器法2023-05-18 2277
-
基于电流型磁链观测器的异步电机矢量控制学习2023-03-30 947
-
异步电机控制笔记2023-03-29 1206
-
交流异步电机矢量控制之simulink仿真搭建2023-03-27 793
-
基于电压型磁链观测器的异步电机矢量控制学习2023-01-29 2949
-
全阶模型磁链观测器学习2022-11-08 7252
-
异步电机无感控制中,观测器在观测磁链时需要用到转速信息,而在速度估计时有需要用到磁链的信息,这样不矛盾吗?2019-05-21 3940
-
异步电机全阶磁链观测器反馈矩阵设计_邓歆2017-01-08 931
-
基于反电动势滑模观测器的异步电机矢量控制2017-01-07 1227
-
异步电机的矢量控制中磁链给定位什么是0.962016-04-22 4428
-
异步电机的无速度传感矢量控制设计2016-01-21 4927
全部0条评论

快来发表一下你的评论吧 !
