

开发一种刚-柔混合触觉传感器
传感器
描述
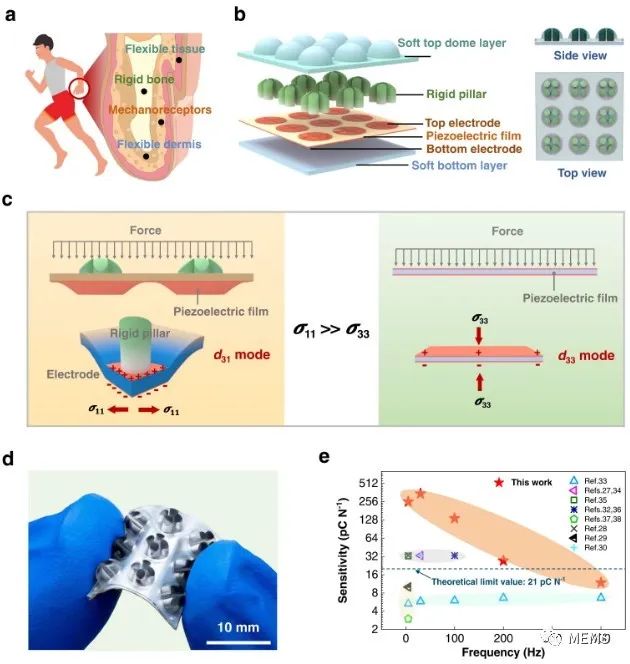
据麦姆斯咨询报道,近日,受手指结构(嵌入肌肉中的刚性骨架)的启发,厦门大学周伟教授、秦利锋副教授和香港城市大学王钻开教授等人开发了一种刚-柔混合触觉传感器(rigid-soft hybrid tactile sensor,RSHTS),其采用刚-柔混合力传输层与柔性基底相结合的结构,不仅大大增强了力传输性能,而且触发了压电感知层的d31工作模式,而不是传统的d33模式,使其具有超高的灵敏度。此外,该传感器能够以高可靠性检测多个力的方向,在机器人动态触觉传感方面显示出巨大潜力。
RSHTS的概念、结构和传感性能
随着机器人科学技术的飞速发展,越来越多的智能机器人被用来代替人类在极端或危险环境中执行任务。例如,在新冠肺炎(COVID-19)大流行期间,智能机器人被广泛用于为被隔离人员运输生活用品,这极大地避免了病毒的交叉感染和传播。作为智能机器人不可或缺的组成部分,柔性触觉传感器在赋予机器人以类似人的触觉感知进行抓取、握持和触摸等高灵巧操作方面发挥着举足轻重的作用。
这些类人传感器可以检测各种刺激的强度和模式,包括按压、轻击和滑动。而对于人类手指来说,这种能力主要归功于四种功能性机械感受器(慢适应感受器I型、II型,即SA-I、II和快适应感受器I型、II型,即FA-I、II),它们分布在皮肤中,用于静态力(<~5Hz)和动态力(5-400Hz)检测。
为了实现智能机器人和可穿戴电子设备的机械力传感感知,通常利用基于压阻、电容、摩擦电和压电机制的触觉传感器将触觉信息转换为电信号。其中,压电柔性触觉传感器在动态力检测方面具有快速响应的优点,因此被广泛用于模拟人体皮肤中的FA-I、II,其形式通常采用由柔性基底和感知层组成的分层结构,其中柔性基底用于直接接触刺激并将力从外部传递到内部感知层,或用于顺应机器人身体的曲面以与环境交互。
然而,与使用硅、陶瓷和玻璃作为基底的基于刚性材料的触觉传感器相比,柔性触觉传感器的灵敏度和响应速度通常受到弹性基底的天然粘弹性的限制,因为它会吸收部分机械能。尽管人们一直致力于设计具有微结构的柔性基底,例如改善感知层的电性能,或者将感知层从2D改变为3D以提高灵敏度,但是压电柔性触觉传感器的灵敏度仍然有限。此外,现有的压电触觉传感器在d33模式下工作,这容易受到低于d33系数的理论灵敏度的影响。
在本项研究中,受动物和人类手指结构的启发,研究人员设计了一种具有三层结构(一层顶部圆顶层、一层感知层和一层底层)的超灵敏压电触觉传感器,该传感器采用刚-柔混合力传输层与柔性基底相结合的结构。研究结果表明,这种混合结构不仅显著增强了高频动态力的传输,而且在新的d31工作模式(而不是传统的d33模式)下实现传感,从而获得超高的灵敏度。
因此,这种RSHTS具有346.5 pC /N的超高灵敏度,约为d33模式下的理论极限灵敏度(21 pC/N)的17倍。此外,RSHTS还具有5-600 Hz宽带宽和0.009-4.3 N的线性力检测范围。研究人员还证明了基于RSHTS的机械手可以实现多个力方向的实时检测。
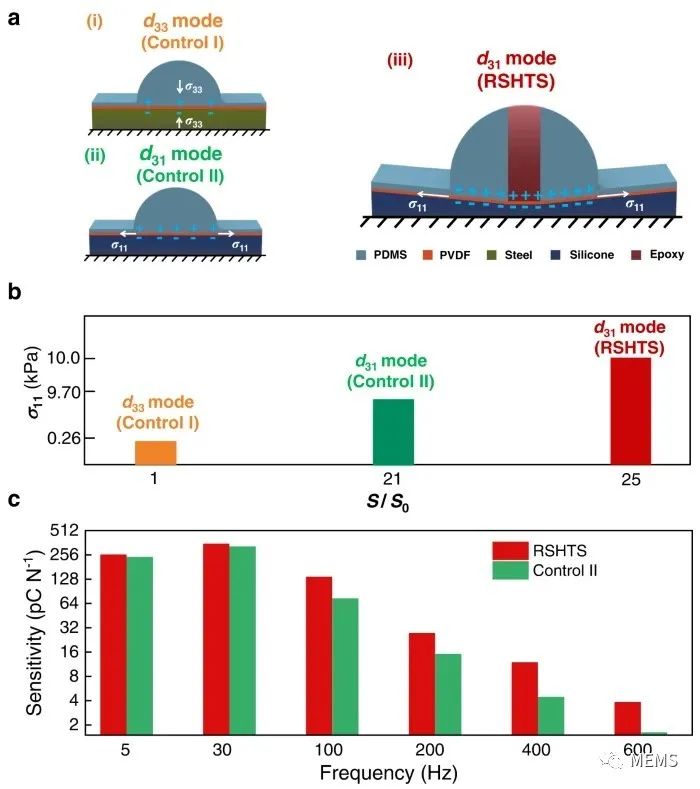
RSHTS应力分析的结构设计思路和数值模拟
归功于顶层的圆顶设计和感知层中图案化的电极,RSHTS可以通过分析四个压电电容器的输出来检测多个力的方向。具有一个感知单元的RSHTS阵列可以区分±X、±Y和±Z轴上施加的力的方向。此外,RSHTS可以清楚地识别高频振动,显示了动态力检测的优势。基于RSHTS的机械手用于检测冲击力并模拟倒水过程,这表明RSHTS在帮助机器人实现高灵巧操作方面的巨大潜力。
研究人员所提出的传感器有望应用于可穿戴电子设备,以实现对外部刺激的长期监测,从而建立机器人的类人触觉系统,恢复残疾人或老年人的触觉感知能力等。
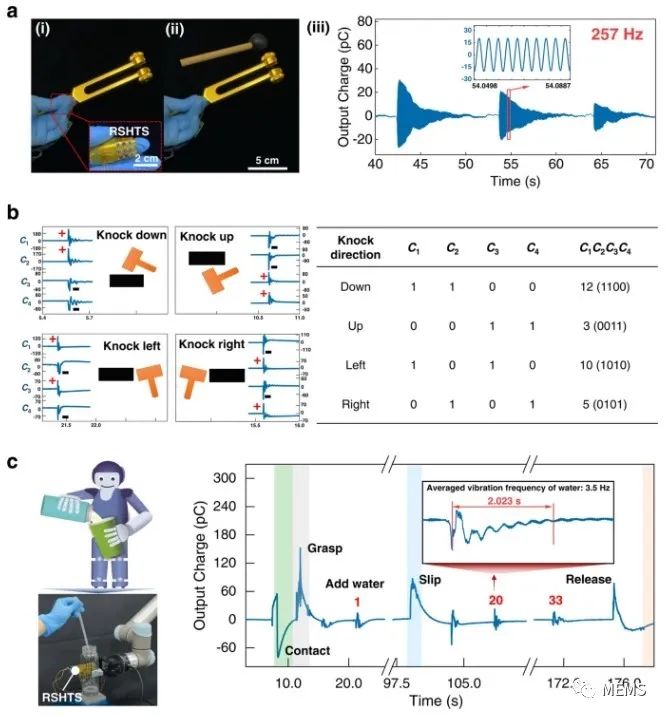
RSHTS的高频刺激检测和基于RSHTS的机械手用于检测冲击力,并模拟机器人倒水。
审核编辑:刘清
-
一种模拟皮肤触觉的柔性仿生光纤触觉传感器2023-11-24 3084
-
一种使用3D打印系统制造具有改进传感性能的保形触觉传感器2023-11-22 1802
-
什么是触觉传感器?触觉传感器如何工作?2023-08-29 6197
-
一种新的线性电流霍尔效应传感器IC2021-05-03 7969
-
触手可知—人工传感器模拟人体触觉2020-12-26 1233
-
多相机光学触觉传感器可用于开发柔软的机器人皮肤2019-11-22 1550
-
传感器应用在触觉前沿图像系统设计2018-11-01 2109
-
浅析模拟触觉传感器原理及应用2018-08-02 9167
-
一种柔性触觉传感阵列力觉标定2018-01-19 904
-
基于传感器的触觉设计应用2017-09-14 1040
-
一种无线传感器开发系统的设计方法2010-07-15 1509
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 4110
-
一种采用光波导的触觉传感器2009-07-10 522
全部0条评论

快来发表一下你的评论吧 !
