

 ZMC408SCAN轴控光纤激光器加工
ZMC408SCAN轴控光纤激光器加工
电子说
描述
上一节介绍了控制器的功能、激光控制接口等,本节主要介绍如何实现激光打标控制。
本节以光纤激光器为例,采用控制器的LASER激光电源接口连接光纤激光器,配合脉冲轴的运动控制,完成激光加工。
01 功能简介
ZMC408SCAN是正运动技术新推出的一款支持EtherCAT总线的开放式激光振镜运动控制器,专为工业激光+振镜+运动控制方面的应用而设计。支持16路运动轴的复杂连续轨迹控制需求,可实现振镜轴+脉冲轴+总线轴的混合插补。
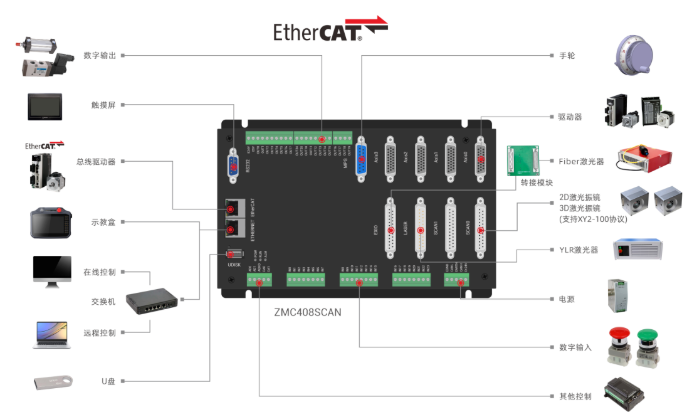
1.ZMC408SCAN实现激光加工包含运动控制与激光控制两大部分,只需一台ZMC408SCAN控制器便可实现振镜控制+激光能量控制+运动轴控制。
(1)运动控制:使用常用的电机驱动设备(脉冲型或EtherCAT总线型驱动器均支持),或者通过激光振镜实现运动;
(2)激光控制:通过LASER、支持PWM功能的OUT输出口或者EXIO扩展接口连接市面上常用的多种类型的激光器。使用MOVE_OP指令控制激光开关,MOVE_PWM指令调节激光的频率和占空比,另外还有MOVE_DELAY指令和MOVEOP_DELAY指令控制开关光的延时。
2.ZMC408SCAN在激光加工领域的优势。
(1)ZMC408SCAN内置高精度PSO位置同步输出功能,在加工圆角、曲线部分时即使进行了减速调整,在高速加工的场合,也能控制激光输出的间距保持恒定;
(2)支持激光振镜控制和振镜反馈,包含2个振镜接口,支持2D振镜和3D振镜,配合不带加减速的运动指令MOVESCAN,拐角处振镜加工自动延时,完成精准高效的激光控制,提高激光加工设备的产能;
(3)通过指令在运动中灵活的调节激光开关/关光延时,响应快,精确到us级别的控制,且设置过程简单,大大缩短了工程师的调参时间;
(4)自带LASER激光器控制接口,支持支持IPG、YLR、YLS等类型激光电源,还带一个EXIO扩展IO接口,通过定制转接板,灵活控制市场上主流的各种激光器;
(5)支持PC同时控制16个ZMC408SCAN控制器同时工作,形成一种振镜阵列的激光加工。
(6)板载4路高速差分脉冲输出,并带4路高速差分编码器反馈,支持EtherCAT总线驱动器的控制,支持5轴XYZAC轴的插补,支持振镜轴与运动轴混合插补。
02 接口说明
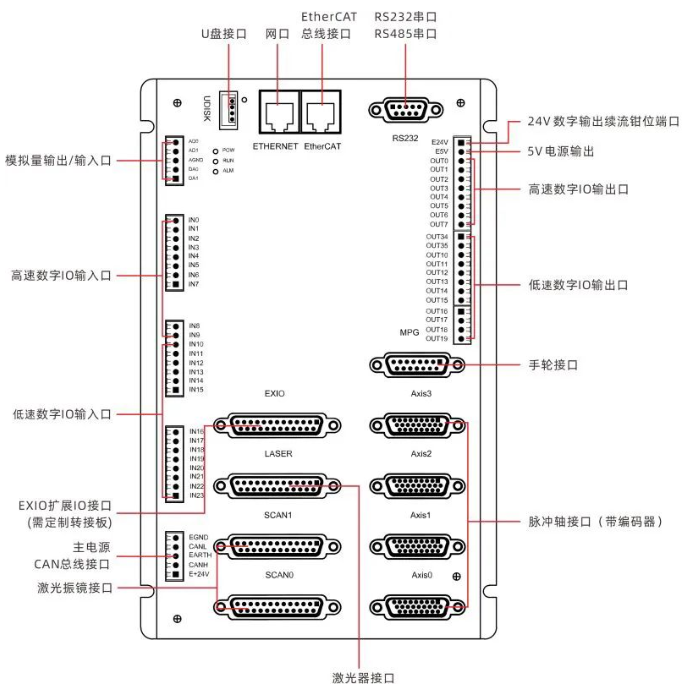
1.控制器的接口说明如下表:
|
标识 |
接口 |
个数 |
说明 |
|
RS232 |
232串口 |
1个 |
采用MODBUS_RTU协议 |
|
RS485 |
485串口 |
1个 |
采用MODBUS_RTU协议 |
|
CAN |
CAN总线 |
1个 |
连接CAN扩展模块或控制器 |
|
ETHERNET |
网口 |
1个 |
采用MODBUS_TCP协议,通过交换机扩展网口个数,至少包含两路网口通道 默认IP地址192.168.0.11 |
|
EtherCAT |
总线口 |
1个 |
EtherCAT总线接口,接EtherCAT总线驱动器和扩展模块 |
|
E+24V |
主电源 |
1个 |
24V直流电源供电 |
|
UDISK |
U盘接口 |
1个 |
插入U盘设备 |
|
IN |
数字量输入 |
24个 |
NPN类型,内部24V供电,输入0-3具有锁存功能 |
|
OUT |
数字量输出 |
12个 |
NPN类型,内部24V供电,输出0-7具有PWM功能,输出0-7具有精准输出和PSO功能 |
|
AD |
模拟量输入 |
2个 |
分辨率12位,0-10V |
|
DA |
模拟量输出 |
2个 |
分辨率12位,0-10V |
|
Axis |
脉冲轴接口 |
4个 |
每个接口包含差分脉冲输出和差分编码器输入 |
|
SCAN |
振镜接口 |
2个 |
激光振镜接口,带反馈,采用XY2-100协议 |
|
LASER |
激光控制接口 |
1个 |
激光电源控制端口,支持IPG、YLR、YLS等类型激光电源 |
|
MPG |
手轮接口 |
1个 |
5-24V手轮信号输入 |
|
EXIO |
扩展IO接口 |
1个 |
灵活定制转接板,可扩展FIBER、YGA等其它类型激光电源控制接口 |
2.ZMC408SCAN控制器LASER激光电源接口功能:
(1)LASER激光电源接口支持连接IPG、YLR、YLS等类型激光电源;
(2)可通过控制器的指令直接发送激光、红光、使能等输出信号进行操作激光器,让激光器产生响应;
(3)DB接口中带有1个PWM输出口;
(4)可接收激光器信号,可显示IN信号并作出对应响应。
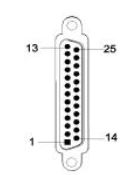
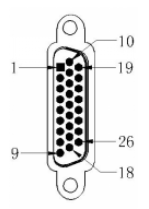
3.LASER激光电源接口采用DB25针公头,针脚说明参见下表:
|
针脚号 |
信号 |
操作口 |
说明 |
|
1、4、14 |
LAGND |
LAGND |
激光模拟信号参考地 |
|
2、3、13 |
NC |
/ |
保留 |
|
5 |
Guide Control |
OUT32 |
红光控制输出引脚,24V有效 |
|
6 |
ACON |
OUT33 |
预留输出引脚,24V有效 |
|
7 |
LaserRequest |
OUT28 |
激光请求输出,24V有效 |
|
8 |
Program start |
OUT29 |
程序开始输出,24V有效 |
|
9 |
ERST |
OUT30 |
激光器复位输出,24V有效 |
|
10 |
LASER ON |
OUT31 |
激光器使能输出,24V有效 |
|
11 |
PWM/NC |
OUT9 |
预留PWM信号,24V电平 |
|
12 |
Modulation- |
/ |
调制信号- |
|
15 |
LASER_AD/NC |
AIN(2) |
预留模拟量输入,0-10V,16位分辨率 |
|
16 |
LASER_DA/NC |
AOUT(2) |
预留模拟量输出,0-10V,16位分辨率 |
|
17 |
Error |
IN44 |
激光器报警输入,24V有效 |
|
18 |
Emission EN |
IN45 |
激光发射输入,24V有效 |
|
19 |
Pow Active |
IN49 |
激光主电源已经启动,24V有效 |
|
20 |
Power ON |
IN48 |
激光系统上电状态输入,24V有效 |
|
21 |
Laser standby |
IN47 |
激光器已处于待机状态输入,24V有效 |
|
22 |
Ready |
IN46 |
激光就绪状态输入,24V有效 |
|
23、25 |
EGND |
EGND |
各数字输入输出的参考地 |
|
24 |
Modulation+ |
OUT8 |
调制信号+,支持PWM,24V电平 |
注意:
(1)上表的输入输出除PWM和Modulation之外其它信号作用支持自定义;
(2)OUT(9)、AOUT(2)和AIN(2)为预留信号,标准型号中没有,如果需要请订货时选择特殊型号。
03 控制系统接线参考
1.以ZMC408SCAN控制FIBER激光器为例,分为运动控制和激光控制两部分。参考架构如下图。
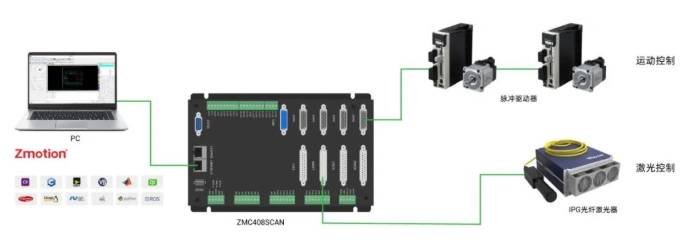
→运动控制部分采用脉冲型驱动器,使用自带的AXIS差分脉冲输入接口连接脉冲型驱动器。
→激光控制部分采用LASER接口连接激光器,根据激光器手册的说明完成控制电路的接线,通过DA模拟量输出口调节激光的能量,通过Modulation调制信号端口控制激光开关。
2.控制器与激光器接线参考
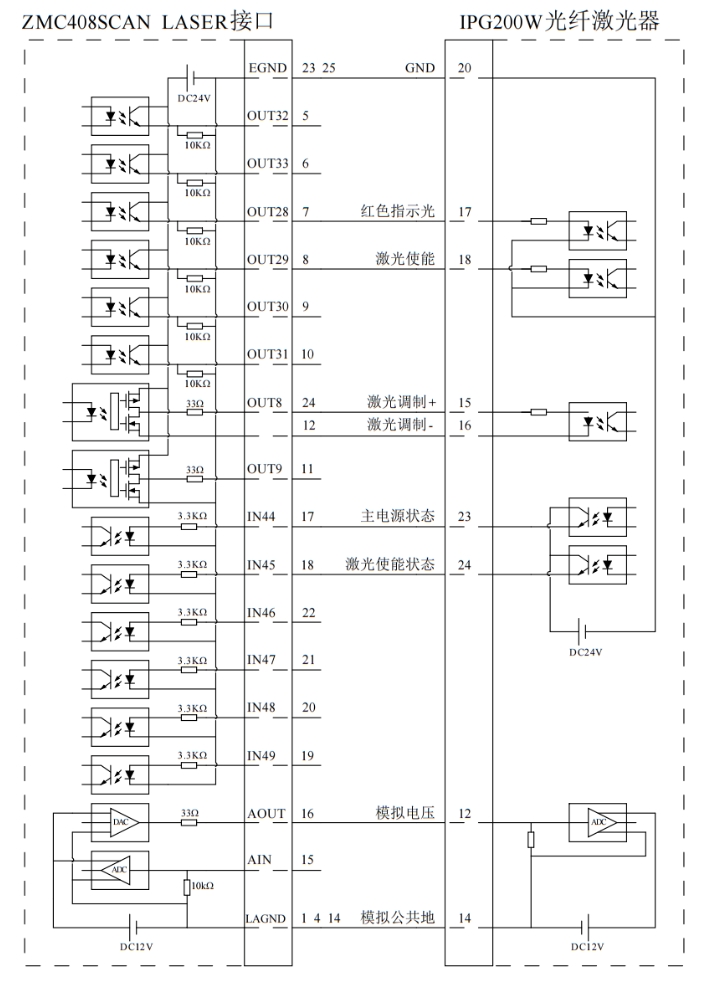
LASER激光电源接口内部电路图和与IPG200W光纤激光器的接线参考如下图所示:
(1)使用LASER接口内的16位DA接线参考(特殊型号支持)
(2)使用控制器外部端口上的12位DA接线参考
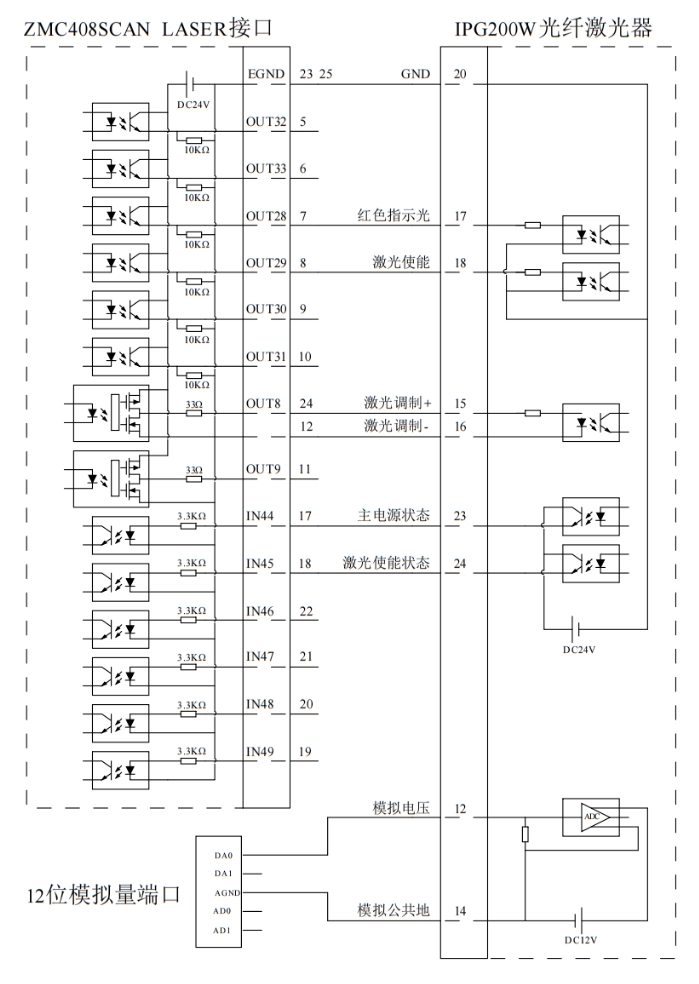
(3)LASER激光器接口接线原理如上图所示,数字IO接口除OUT8,OUT9外可自行定义。
(4)对于需要模拟量输入的激光器有两种接线选项,对分辨率要求不高的可以选用控制器12位DA接口实现,对于分辨率要求较高的可以选择LASER接口中带的16位DA实现功能。
(5)请使用屏蔽线接线,尤其是环境恶劣的场合,务必使屏蔽层充分接地。
3.控制器与脉冲驱动器接线参考
ZMC408SCAN提供4个本地差分脉冲轴接口,同时包含差分编码器输入,每个接口为标准DB26母座。
与松下A5/A6伺服驱动器差分接线参考示例:
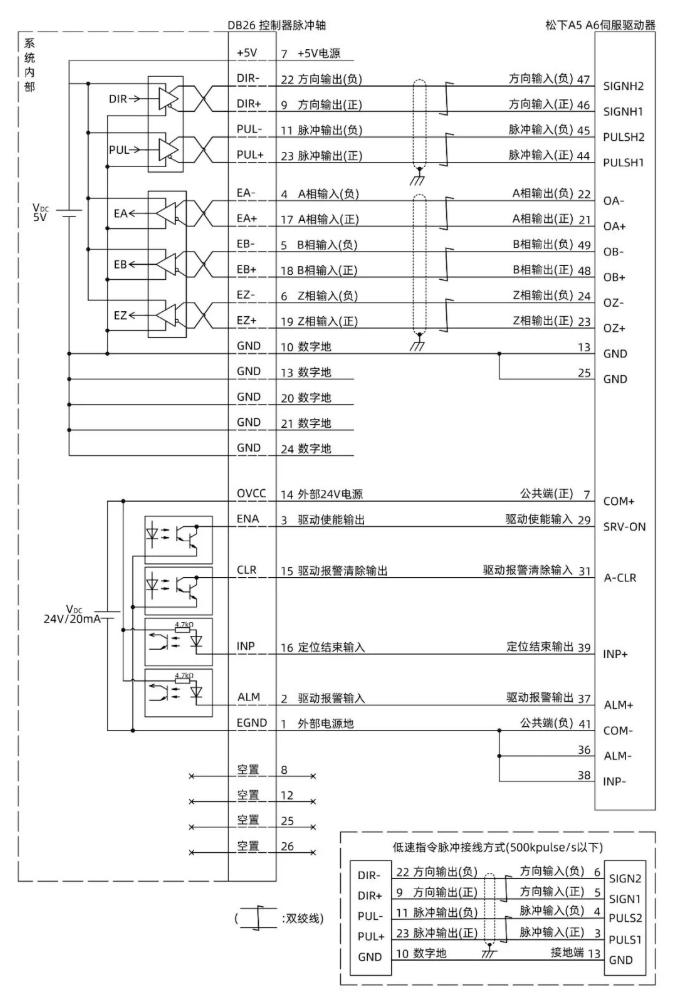
差分脉冲轴接口接线原理如上图所示,不同型号驱动器接线方法存在差异,请谨慎连接;
请使用屏蔽双绞线接线,尤其是环境恶劣的场合,务必使屏蔽层充分接地。
04 光纤激光器控制实例
1.操作步骤
(1)请按照以上接线说明正确接线;
(2)上电后请选用EtherNET、RS232(默认参数可直接连接)、RS485(默认参数可直接连接,硬件需使用转接头)三种任一种接口连接ZDevelop;
(3)通过ZDevelop视图栏中输入输出窗口操作监控对应IO点;
(4)通过ZDevelop视图栏中AD/DA窗口操作监控对应模拟量输入输出口;
(5)通过ZDevelop在线命令发送指令 PWM_FREQ(PWM编号) = 频率,PWM_DUTY(PWM编号) = 占空比。
2.参考BASIC例程:激光控制参考上节引脚说明
BASE(0,1) '选择脉冲轴0,1
ATYPE = 1,1 '设置脉冲轴类型
UNITS = 100,100 '设置脉冲当量
SPEED= 1000,1000 '设置轴运动速度
ACCEL= 10000,10000 '设置加速度
DECEL= 10000,10000 '设置减速度
DPOS = 0,0 '轴位置清零
MERGE=1,1 '开启连续插补
SRAMP=50,50 'S曲线
CORNER_MODE = 2,2 '设置拐角减速
DECEL_ANGLE = 30*PI/180,30*PI/180 '设置轴拐角减速范围
STOP_ANGLE = 90*PI/180,90*PI/180 '设置轴拐角减速范围
FORCE_SPEED = 1000,1000 '减速参考速度
MOVEABS(0,0) '移动到中心零点位置
TRIGGER
BASE(0,1)
AOUT(0)=2048 '12位模拟量输出口0设置激光器功率为50%,0-10V对应功率0-100%
OP(29,ON) '打开激光器使能IO
MOVEABS(0,200) '空移到0,200位置
MOVEOP_DELAY =-1.5 '提前1.5ms开光 ,延时开光使用MOVE_DELAY
MOVE_PWM(8,0.5,10000) '设置PWM占空比0.5,频率10000K
MOVE_OP(8,ON) '出光
MOVEABS(200,200) '标刻字母Z,移到200,200位置
MOVEABS(0,0) '移到0,0位置
MOVEABS(200,0) '移到200,0位置
MOVE_DELAY(2.5) '延时关光2.5ms
MOVE_OP(8,OFF) '关光
END
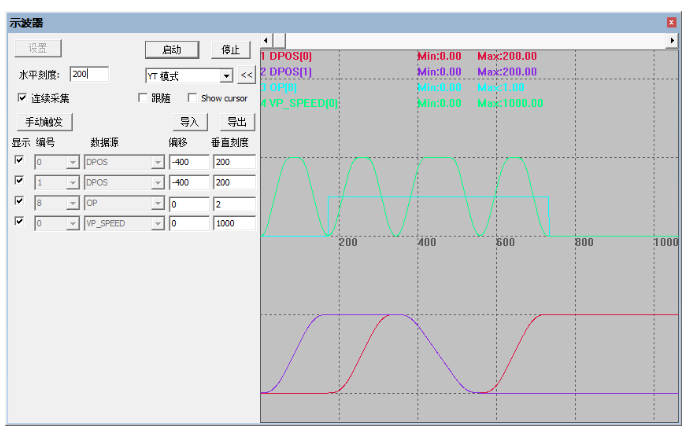
示波器采样运动波形如下:在运动到位置(0,200)之前提前1.5ms开光,标刻字母Z,运动结束延时2.5ms光关。
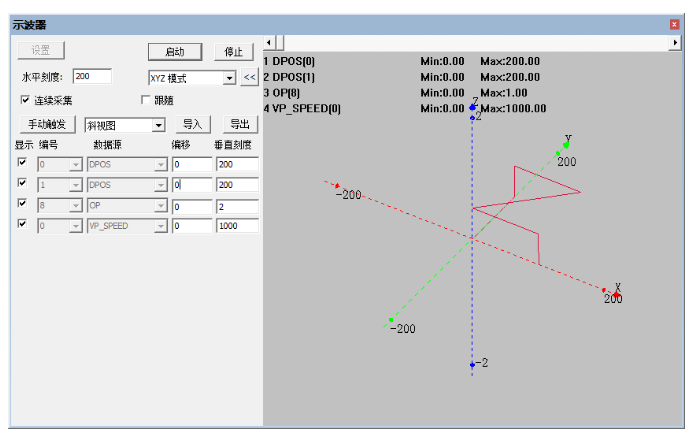
3D模式下便于查看哪段运动激光开启。
本次,正运动技术开放式激光振镜运动控制器(三):ZMC408SCAN轴控光纤激光器加工,就分享到这里。
审核编辑:汤梓红
- 相关推荐
- 热点推荐
- 控制器
- 激光器
- EtherCAT总线
-
ZMC408SCAN振镜控制光纤激光器加工2022-09-14 3438
-
ZMC408SCAN光纤激光器的能量控制2022-09-19 3258
-
高功率光纤激光器2018-11-02 5086
-
【资料】正运动ZMC408SCAN控制器用户手册2023-05-10 5579
-
开放式激光振镜+运动控制器(五):ZMC408SCAN控制器2022-03-03 2877
-
激光振镜运动控制器(一):ZMC408SCAN接口与功能2022-08-01 4500
-
开放式激光振镜运动控制器:ZMC408SCAN激光接口与控制2022-09-01 4648
-
应用ZMC408SCAN开放式激光振镜运动控制器的C++开发2022-10-24 3281
-
ZMC408SCAN振镜控制光纤激光器加工的方法2022-10-26 3580
-
开放式激光振镜运动控制器:C++振镜矫正方法与实现2022-10-27 4273
-
开放式激光振镜运动控制器ZMC408SCAN进行振镜矫正的方法与实现2022-10-31 3654
-
浅谈ZMC408SCAN激光接口与如何实现激光的控制2022-11-01 2554
-
正运动激光振镜运动控制器ZMC408SCAN用户手册2023-04-11 954
-
激光振镜运动控制器ZMC408SCAN-V2用户手册2023-06-08 894
全部0条评论

快来发表一下你的评论吧 !
