

S7-200 SMART CPU固件更新V2.7
电子说
描述
V2.7固件
S7-200 SMART CPU 固件更新 V2.7 提升了下表中八种 CPU 型号的整体稳定性,支持Web 服务器上的用户自定义网页和 Web API功能。下表中固件更新的 ST CPU 模块支持2/3D 直线插补运动控制。
表格 1 受固件更新 V2.7 影响的 CPU 型号
CPU 型号 产品编号
CPU SR20,AC/DC/继电器 6ES7288-1SR20-0AA1
CPU ST20,DC/DC/DC 6ES7288-1ST20-0AA1
CPU SR30,AC/DC/继电器 6ES7288-1SR30-0AA1
CPU ST30,DC/DC/DC 6ES7288-1ST30-0AA1
CPU SR40,AC/DC/继电器 6ES7288-1SR40-0AA1
CPU ST40,DC/DC/DC 6ES7288-1ST40-0AA1
CPU SR60,AC/DC/继电器 6ES7288-1SR60-0AA1
CPU ST60,DC/DC/DC 6ES7288-1ST60-0AA1
说明
带 V2.7 版本固件的 ST20 CPU 仅支持2D 直线插补运动控制功能;带 V2.7 版本固件的 ST30,ST40,ST60 CPU 支持2D 和3D直线插补运动控制功能
运动控制
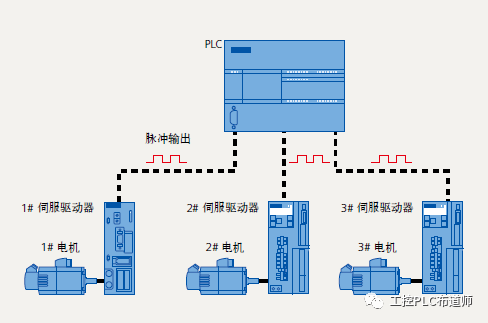
S7-200 SMART 晶体管输出类型 CPU 模块本体最多提供三轴 100 KHz 高速脉冲输出,通过强大灵活的设置向导可组态为 PWM 输出或运动控制输出,支持多达 3 轴直线插补功能,为步进电机或伺服电机的速度和位置控制提供了统一的解决方案。
S7-200 SMART SR/ST CPU 使用集成的 PROFINET 接口,可利用通信的方式控制伺服驱动器,进一步减少设备间的接线,缩短设备的响应时间,从而满足小型机械设备的定位需求。
通过脉冲方式控制伺服/步进驱动器
S7-200 SMART CPU 提供了四种开环运动控制方法:
• 脉冲串输出 (PTO):内置在 CPU 的速度和位置控制。此功能仅提供脉冲串输出,方向和限值控制必须通过应用程序使用PLC中集成的或由扩展模块提供的 I/O 来提供。
• 脉宽调制 (PWM):内置在 CPU 的速度、位置或负载循环控制。若组态 PWM 输出,CPU 将固定输出的周期时间,通过程序控制脉冲的持续时间或负载周期。可通过脉冲持续时间的变化来控制应用的转速或位置。
• 运动轴:内置于 CPU 中,用于速度和位置控制。此功能提供了带有集成方向控制和禁用输出的单脉冲串输出,还包括可编程输入,并提供包括自动参考点搜索等多种操作模式。
• 运动轴组:支持基于PTO的开环轴组功能,可支持2轴或3轴的直线插补功能,并可以支持通过运动控制向导的Move_Path功能进行多段路径规划。
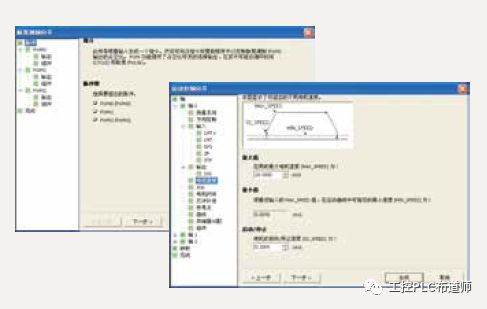
PWM和运动控制向导设置
为了简化您应用程序中位控功能的使用,STEP 7- Micro/WIN SMART提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。
PWM向导设置根据用户选择的PWM脉冲个数,生成相应的PWMx_RUN子程序框架用于编辑。
使用运动向导组态轴组 和生成 POU(程序组织单元),命令轴组从实际位置到绝对或相对目标位置的 2D/3D 直线插补运动。
审核编辑 :李倩
-
S7-200SMART与S7-200的区别2026-06-14 374
-
西门子S7-200 SMART的通信端口解析2024-02-27 6605
-
S7-200 SMART与调试助手之间TCP通信2023-10-29 2814
-
SIMATIC S7-200 SMART系统手册2023-08-28 1427
-
S7-200 SMART 通信端口以及连接方式2023-08-14 5870
-
S7-200SMART之间进行PROFINET IO通信技术分析2023-07-23 4518
-
S7-1500与S7-200 SMART的PROFINET IO通信配置2023-07-02 14992
-
S7-200 SMART变量倒序的编程2023-05-06 2042
-
S7-200 SMART PLC的应用案例2023-04-12 3513
-
S7-200 SMART如何下载程序?2023-03-29 6684
-
如何导入S7-200 Smart变量2023-02-07 9952
-
S7-200 SMART存储卡的使用指南2022-09-08 4130
-
S7-200SMART与S7-200的区别是什么2020-12-04 6852
全部0条评论

快来发表一下你的评论吧 !
