

多旋翼飞行器设计与控制-基本组成
军用/航空电子
描述
一、机架
1、机身
指标参数:
重量:尽可能轻
轴距:外圈电机组成圆的直径
材料:冲碳纤维就完了
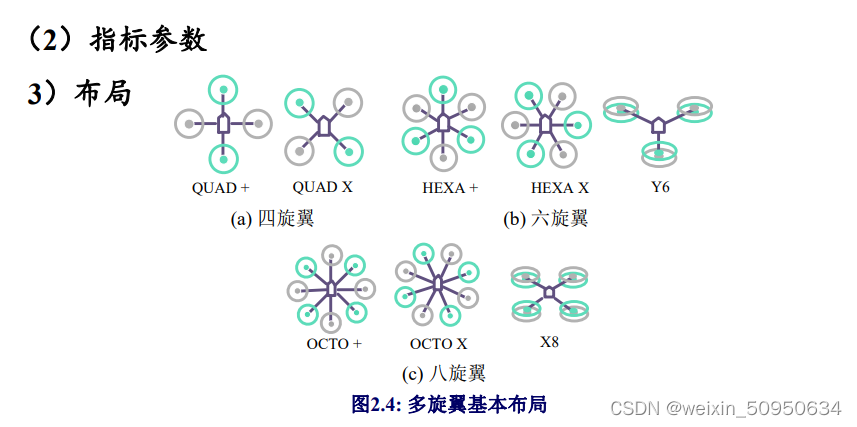
布局:
2、起落架
作用:
支撑多旋翼重力
避免桨叶离地太近
减弱起飞时地效
消耗和吸收着陆撞击能量
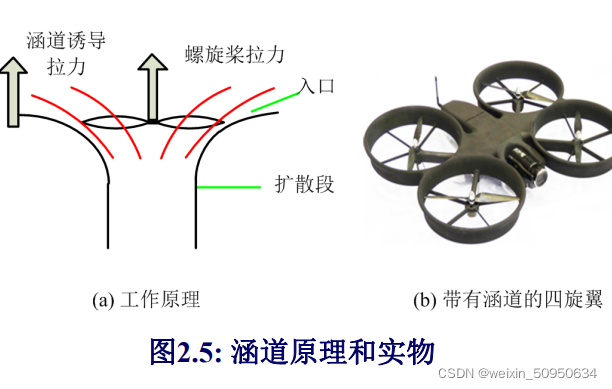
2、涵道
作用:
保护桨叶和人身安全
提高桨叶拉力效率
减小噪音
工作原理:
当螺旋桨工作时,进风口内壁空速快静压小,外壁静压大,产生附加拉力
参数:
扩散段长度
螺旋桨直径
尽管涵道可以提升效率增加悬停 时间,但增加涵道的同时也会增加多 旋翼机的重量从而使悬停时间缩短, 因此最终的优化设计需要权衡与折中。
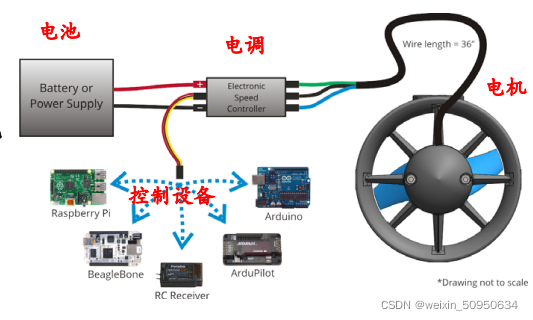
二、动力系统
动力系统包含螺旋桨、电机、电调和电池
1、螺旋桨
指标参数:
螺距:设螺旋桨在一种不能流动的介质中旋转,那么螺旋桨每转一圈,就会向前进一个距离,就称为螺距(这好像和螺丝的定义一样)
型号:4位表示,前两位表示直径后两位表示螺距
弦长
转动惯量:小的转动惯量可以视为阻尼比小,因此可以提升电机作用的响应速度。
桨叶数
安全转速:螺旋桨转速越高,桨叶形变越大,当螺旋桨转速大到一定程度时,螺旋桨的力效就会降低,因此需要使螺旋桨工作在安全转速以下
螺旋桨力效:

静平衡:螺旋桨静平衡是指螺旋桨重心与轴心线重合时的平衡状态
动平衡:螺旋桨动平衡是指螺旋桨重心与其惯性中心重合时的平衡状态
动平衡与静平衡的目的是减小震动
2、电机
主要以无刷直流电机为主
标称空载KV值:空载(不安装螺旋桨)情况下,外加1V电压得到的电机转速值
标称空载电流和电压:在空载试验中,对电机施加空载电(通常为10V)时测得的电机电流被称为空载电流
最大峰值电流/功率:电机能承受的最大瞬时通过的电流/功率
最大持续电流、功率:电机能允许持续工作(规定时间)而不烧坏的最大连续电流/功率
内阻
电机效率:

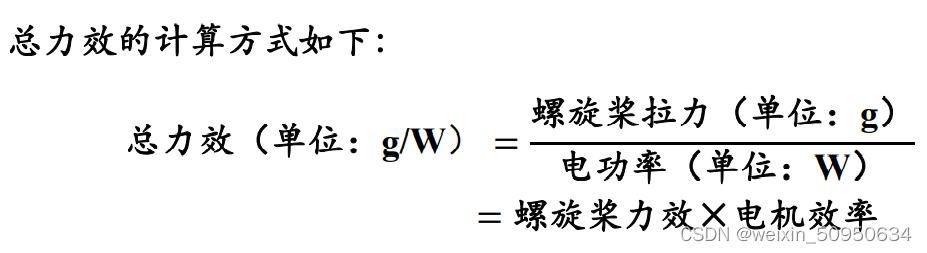
总力效:
3、电调
基本功能是为电机调速
最大持续/峰值电流:安数不足会导致电调烧毁
电压范围
内阻:由于电调电流很大,因此会在内阻上产生较高的发热,因此要注意散热
刷新频率:影响电机的响应速度
可编程特性
兼容性:电机与电调兼容不好会发生堵转
方波驱动:数字信号控制工作在开关状态
FOC矢量控制:正弦驱动在运行平稳性、调速范围、减振减噪方面优于方波驱动。目前可采用光电编码器、霍尔传感器或者基于观测器的方法测量转子角度。因为多旋翼电机始终工作在高转速状态下,可以基于观测器的方法进行矢量调制。
4、电池
三、指挥控制系统
1、遥控器和接收机
指标参数:
频率:常用2.4GHz,尽量避开障碍物
调制方式:PCM(脉冲编码调制)与PPM(脉冲位置调制)
通道:一个通道对应一个独立的动作
控制模式:日本手和美国手
油门:直接是油门和增量式油门
遥控距离
2、自动驾驶仪
组成:GPS、IMU、气压计、测距模块、微型计算机、接口。
主要解决感知、控制与决策问题
3、地面站
4、数传
数传电台是指借助DSP 技术和无线电技术实现的高性能专业数据传输电台。采用数字信号处理、数字调制解调、具有前向纠错、均衡软判决等功能的无线数据传输电台。数传电台一端接入计算机(地面站软件),一端接入多旋翼自驾仪,通讯采用一定协议进行,从而保持自驾仪与地面站的双向通讯。
指标参数:
频率
传输距离
传输速率
通信协议:MAVLink
编辑:黄飞
-
四旋翼飞行器控制模型2021-09-15 1353
-
多旋翼飞行器设计与控制的基本组成2021-09-14 1076
-
浅析四旋翼飞行器2021-08-06 2627
-
多旋翼无人机飞行器的入门学习资料和实践说明2019-11-04 2102
-
多旋翼飞行器设计与控制2019-07-11 5057
-
多旋翼自主飞行器(C题)2015-08-12 10201
-
四旋翼飞行器的设计2013-11-28 15026
全部0条评论

快来发表一下你的评论吧 !
