

 测控复合式重锤物位计系统
测控复合式重锤物位计系统
电子说
描述
本文的测控复合式重锤物位计系统核心功能为物位测量,整个物位测量过程状态如下图2.1所示。由图2.1可知,本文设计的重锤物位计系统在工作过程中共有两个位置点:顶部原点、底部料面;三种工作状态:锤体上升、锤体下降、顶部停驻;一种故障状态:“埋锤”。
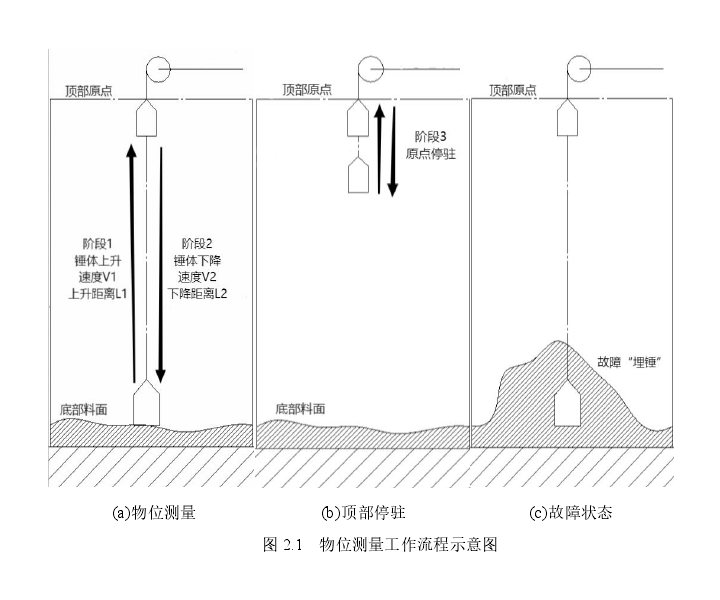
系统物位测量的过程如下:系统安装调试开启前,锤体初始位置位于料仓底部。调试工作开始时,系统启动,微机发出升锤信号(阶段1),驱动电机输出正向力矩M1,带动锤体以速度V1上升。当锤体升至料仓顶部原点时,锤体进入停驻状态。由于本文驱动电机为无外置调速器的无刷直流电机,若电机长时间堵转易发热烧毁。因此将锤体到顶停止状态改为了震荡停驻的设计,即锤体到顶后就缓慢地进行短距离周期性往复运动,以实现功能上的顶部停驻效果(阶段3)。系统在开机后绝大部分时间不进行料位测量,均保持在该状态,该阶段也称为原点停驻状态。
当系统发出物位测量命令后,驱动电机输出正向力矩M2,此时M2小于锤体的负载转矩M0,被锤体带动反向运转,锤体以速度V2下降(阶段2)。当接触到料面时,系统自动识别到锤体触底,此时电机重新输出正向力矩M1,带动重锤上升(阶段1)。当系统识别到锤体升至料仓顶部原点后,便进入原点停驻阶段。同时计算出此时料面高度值,并显示在LCD屏幕上。之后一直处于原点停驻阶段,等待下一次物位测量命令。
此外,故障检测也是重锤物位计系统的重要功能,而“埋锤”和“丢锤”(信号丢失)问题就是现有的重锤物位计系统常见的问题。在测控分离式重锤式物位计中,由于距离检测与锤体位置的判断完全依赖于外置的摆杆机构以及附有光敏传感器的检测导轮。因而一旦出现机械结构动作失灵或传感器信号丢失的情况,便会出现“丢锤”的故障。本系统所设计的测控复合式重锤物位计由于去除了所有的外置传感器,并将物位测量信号与无刷电机换相信号复用,避免了因外部信号丢失造成的“丢锤”问题。因此本系统只需解决埋锤问题的故障检测即可,“埋锤”检测,在功能上体现为:当锤体在上升过程中被物料所掩埋时,系统会自动识别非正常状态,而后停止对重锤的拽引,以报警灯常亮的方式发出报警信号。
审核编辑 黄昊宇
- 相关推荐
- 热点推荐
- 物位计
-
两极复合式EMI滤波器电路2008-08-26 4772
-
贴片机的旋转头复合式结构基本结构2018-09-06 2878
-
复合式振动测试2018-10-16 2823
-
双模块复合式结构贴片机2018-11-27 1802
-
雷达物位计的测量原理,如何使用雷达物位计?2021-03-18 2988
-
导波雷达物位计和雷达物位计的区别?2021-04-23 17103
-
基于复合式光电编码器的永磁同步电机启动方法研究2009-10-30 869
-
复合式风力发电机2009-11-24 838
-
复合式集中滤波器电路2008-12-15 747
-
温湿度振动复合式环境箱2009-01-09 494
-
音色醇美的复合式甲类功放2016-06-15 1509
-
捷联图像导引系统传感器数字复合式稳像方法2017-01-03 781
-
重锤式料位计的工作原理2021-11-03 4070
-
重锤物位计发展历史2022-09-08 2199
-
复合式过电压保护器也叫三相组合式过电压保护器组合式避雷器2026-03-19 396
全部0条评论

快来发表一下你的评论吧 !
