

为什么说智能驾驶将进入数据驱动的时代?
描述
“你的头脑就是你的牢笼,但是如何突破自己的大脑呢?”人们经常用这句话来审视自我的局限,但在2022年的智能驾驶行业,这也是所有智能驾驶“大脑”需要回答的一个问题。
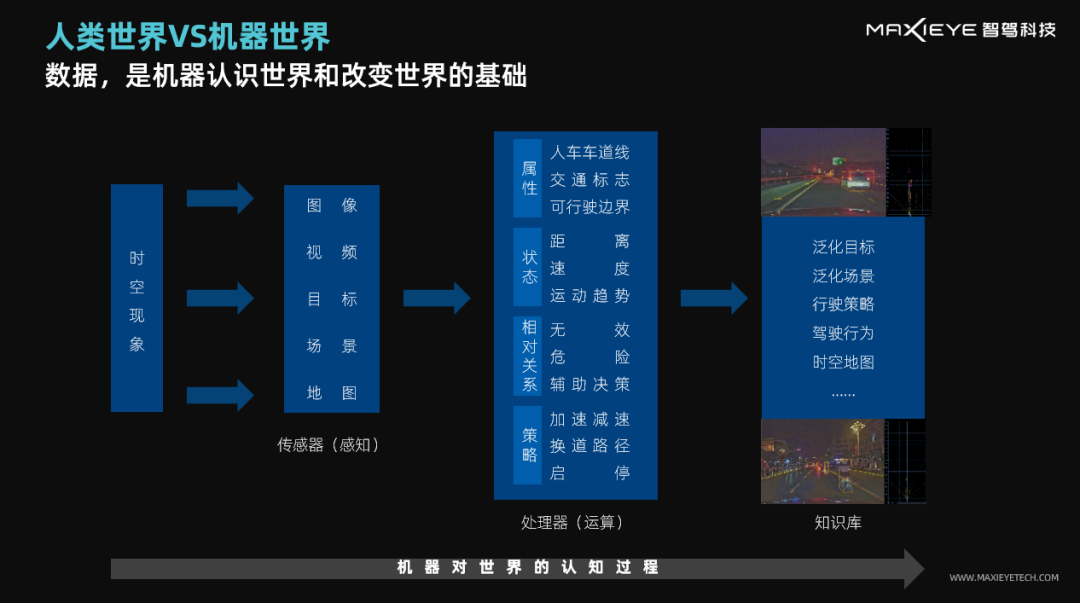
在人类世界中,出生以后,我们首先通过大量的经验学习、逻辑分析,建立自己的知识体系,成为一个独立的个体。但在积累到达一定程度后,往往会开始认识并反思自己的局限,并激励自己通过拓宽认知的边界和思维上的突破,拥抱更广阔而美好的世界,达到全新的高度和境界。这是人类学习和进步的方式。
在智能驾驶领域中,通过对大量数据和丰富出行场景的不断学习,变得“越来越聪明”,不断实现系统性能的突破,这是机器智能的方式。
过去几年,智能驾驶经历了从无到有的过程,从技术原型的积累到初代产品上车,从L0-L1级的基础安全性能到L2++级的智慧化体验,随着高阶智能驾驶落地需求越来越迫切,数据驱动和场景闭环的重要性也凸显出来。
为什么说智能驾驶将进入数据驱动的时代?
数据如何在场景中实现流转?
场景闭环又如何把当下的量产落地和未来高阶方案串联起来?
近日,智驾科技MAXIEYE创始人周圣砚在2022 年度(第四届)高工智能汽车市场峰会发表主题演讲,围绕《自动驾驶升维:量产,数据,场景闭环》进行了观点阐述,通过剖析智能驾驶面临的难题,与行业同仁探讨数据驱动的“解题”方案。

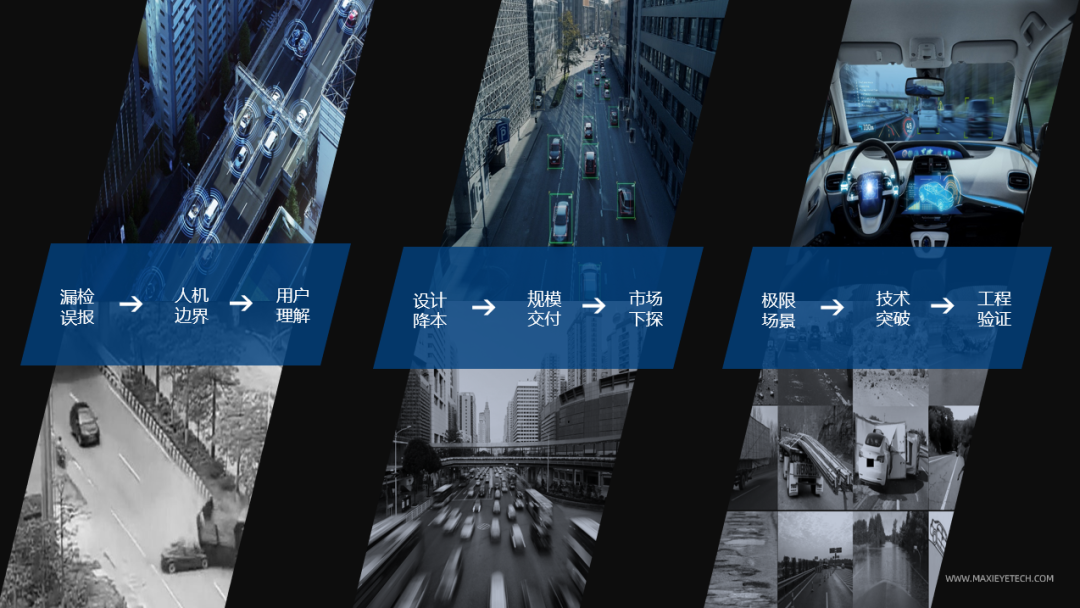
第一,实现可靠稳定的系统性能难。智能驾驶诞生的初衷,是让出行更加安全、舒适、便捷。但最近因智能驾驶导致的交通事故,一定程度引发了大家的质疑和担忧。智能驾驶系统的安全可靠,人机交互的边界规则等成为不可回避的问题。
“这是智能驾驶理想和现实的差距。”周圣砚表示,在用户理想的认知中,智能驾驶是没有约束、无限制的,但现阶段可规模化应用的辅助驾驶,本质上还是人机共驾,需要用户对智能驾驶的“渐进式”成长有充分的理解。
作为技术服务提供商要做到的是,无论行业处于哪个阶段,都需要确保在相应的功能及使用场景的范畴内,提供安全可靠的产品。场景边界之外是人开,场景边界之内是机器去开。场景边界之外需要钩子算法去获取下一代产品升级所需要的数据和场景。但过去行业浪费了大量数据场景,属于智能驾驶的场景库积累才刚刚起步。
第二,极致性价比和规模化量产难。一晃眼智能驾驶产业已经发展了多年,但在实际上车中,真正的规模化才刚刚开始。在中国乘用车所有价位车型销量中,15万元以下车型销量占比远超50%,但这超过50%的价位车型L2级智能驾驶渗透率,比市场平均水平低了10个百分点,反应了当前智能驾驶尚未很好地渗透大众消费市场。
立足大众消费市场,背后的规模化量产面临一个现实问题:性能和价格的平衡。“用很高的成本做一套系统,消费者很难接受,对基于规模化量产实现大量数据积累,意义并不大。”但如果没有规模化和场景,上述的第一个难题同样难以解决。
第三,高阶智能驾驶落地难。在自动驾驶分级中,到今天能够真正在开放场景中落地的智能驾驶,依然在L3级以下。基于渐进式升维路线从下往上走,依赖基于规模化L2的场景和数据基础,才能实现高阶应用的突破。
三大难题共同指向数据和场景:在量产系统边界明确的前提下,建立用户认知,通过数据驱动下一代产品升级;基于有效场景和数据的挖掘实现极致的系统性能,以高性价比实现人人可享的规模化,再由人人提供的数据驱动迭代;在良好的用户认知和动态迭代中,实现高阶智能驾驶升维。

可靠系统和高阶方案的实现,对数据积累和场景闭环提出了“加法的”需求——尽可能多地上车。
在规模化量产中打通数据闭环后,更重要的是建立获取边界数据的有效触发机制。“盲目收集大量常规的场景,对系统意义并不大。我们希望在不增加硬件成本的前提下,获取更多边界数据,边界数据意味着下一代系统边界性能的突破。”
目前MAXIEYE已经在1R1V高性价比算力平台的MAXIPILOT1.0量产方案中,部署了数据闭环和33种触发机制(触发机制还在持续增加中),包含功能触发、驾驶员行为触发、系统触发、感知触发等类型,实现边界数据场景的高效利用。
比如AEB功能触发前后几秒,MAXIPILOT会将场景视频、车身信息、系统参数信息等关联信息闭环回传,进行复盘和分析;而感知触发的目的,是将同一目标的不同传感器检测数据做全面的精度对标,大幅提高感知精度,为高阶系统落地进行技术积累。
目前MAXIEYE通过量产系统已经积累超过1亿公里真实场景数据。“数据回传之前在车端完成脱敏,通过算法部署把人脸、车牌等信息在车端清洗掉。”
MAXIPILOT量产系统AEB触发视频
“看到这些AEB触发场景,同事们感触很深,自己做出的产品实实在在避免了潜在交通事故的发生,摩托车横穿的那个紧急制动,甚至救了一家三口。”
在数据回传中,MAXIEYE开发了配套工具链。通过工具可以看到实时感知结果、实时融合结果、实时路径规划显示,以及给油门刹车发出的控制信号。有价值的场景数据会到后端进行网络校验,将更准确的结果不断更新到量产车中,在场景闭环中实现数据驱动的智能驾驶。

“能不能用低阶系统为高阶系统赋能?”这是车厂合作伙伴提出的命题,也是MAXIEYE升维的思路所在,即用低阶的“成本减法”和众包方式重建关键场景地图的“场景减法”,为高阶智能驾驶铺路。
高阶领航辅助驾驶量产中,城市地面和路口等场景一直是难以突破的瓶颈所在。通过基于用户车辆的众包数据,解决路口等关键场景的信息重建,可支持高阶系统典型场景的敏锐迭代。
众包数据实现路口等关键场景的信息重建
伴随MAXIEYE全系产品部署数据闭环和相关协议栈、技术栈。换句话说,就是在不同的传感器系统方案中,除了数据流量不同,都可以用通用的工具链赋能车厂客户搭建完整的数据机制。
此外,MAXIEYE正加速部署BEV技术架构,这种端到端的智能驾驶系统开发,将大幅减少感知目标特征的信息损失,减少对经验逻辑依赖的同时,真正实现数据驱动的自学习,释放数据和场景闭环的更大价值。
审核编辑:刘清
-
何小鹏:2025年将进入到真正的自动驾驶时代#自动驾驶新知录 2022-10-25
-
ARDUINO基础入门,带你进入自制智能机器人的时代2013-09-14 21705
-
未来,是大数据的时代2014-09-24 3703
-
聚焦智能驾驶与金融大数据,2017吉林松花湖论坛8月召开2017-06-27 3013
-
未来将进入移动新能源时代2017-11-09 5181
-
加速普及 智能家居市场进入“落地”时代2018-03-27 3466
-
机器学习、深度学习、卷积神经网络...人工智能时代的曙光2018-05-22 9355
-
5G时代的汽车是什么样的2019-05-09 3245
-
智能驾驶全量数据感知及分析系统2020-12-31 2774
-
智能驾驶数据网络时间同步2021-09-03 2235
-
随着大数据技术等互联网科技的引入 铁路春运进入智能服务时代2018-02-03 4030
-
我国智能手机市场将正式进入一超两强时代2019-11-08 3753
-
智能工具的广泛应用,将人类带向了数据驱动的智能时代2020-10-15 2507
-
银行4.0时代来临:银行业将全面进入数字化时代2020-10-21 12668
-
数据闭环,智能驾驶下半场的制胜法宝2023-09-07 1436
全部0条评论

快来发表一下你的评论吧 !
