

dToF雷达和三角雷达对比分析
MEMS/传感技术
描述
01 激光雷达
扫地机领域激光雷达简介及分类
dToF&三角法
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射光信号,然后通过接收物体反射回来的光信号,通过信号处理和数据处理,便获得目标的相关信息,比如探测到的距离、方位、高度、速度等。
目前市面上扫地机领域的主流激光雷达产品,按技术路线大体可以分为两类,一类是dToF(Direct Time of Flight,直接时间飞行法)雷达,另一类是三角测距法雷达。
02 原理简介
三角法的原理
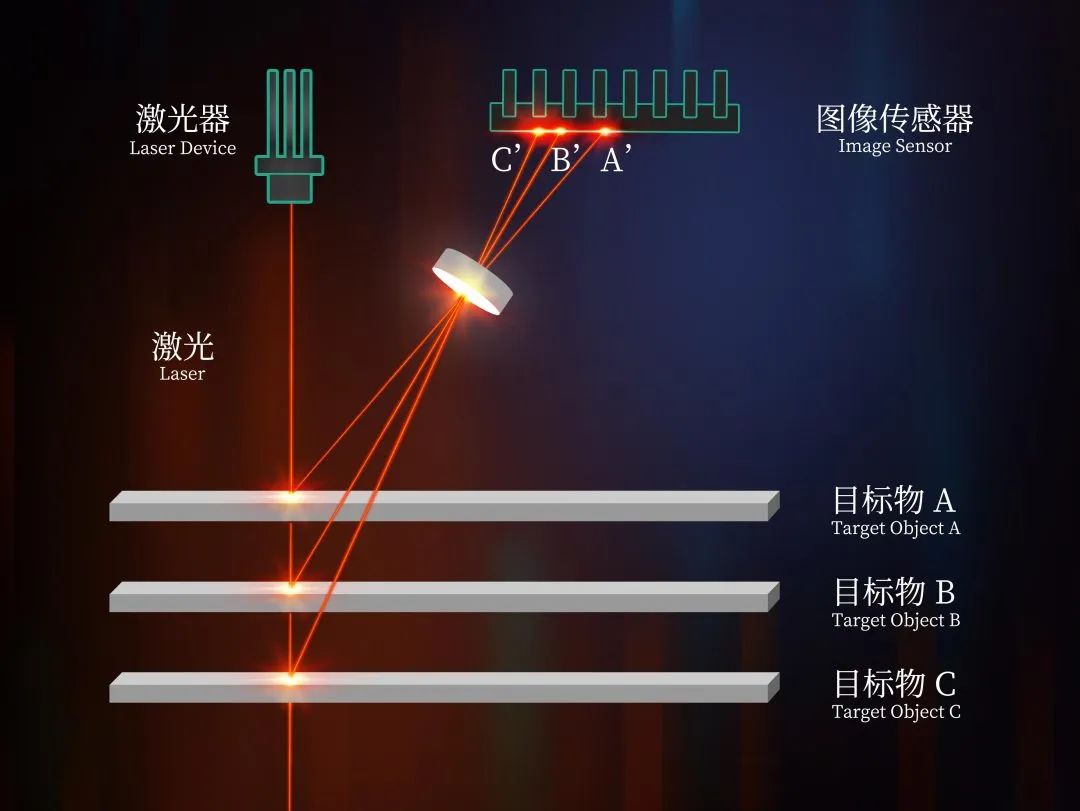
激光以一定的入射角度照射被测物体,激光在物体表面发生反射和散射,反射光由图像传感器接收,由于激光器和探测器间隔了一段距离,所以依照光学路径,不同距离的物体将会成像在图像传感器上不同的位置。因此通过三角算法公式,计算出被测物体与基线的距离值,就能推导出被测物体的距离。
dToF的原理
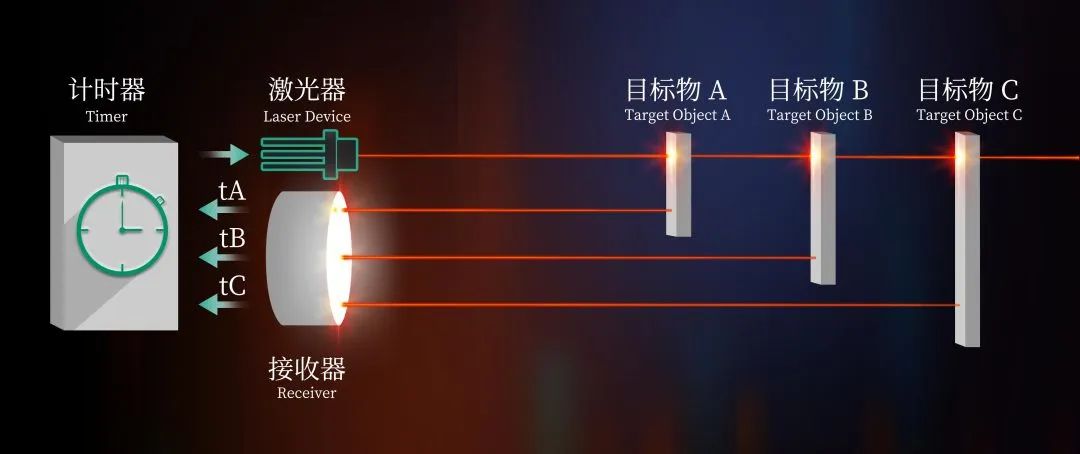
激光器发射一个激光脉冲,并由计时器记录下发射的时间;回返光经接收器接收,并由计时器记录下回返的时间。两个时间相减即得到了光的“飞行时间”,而光速是一定的,因此在已知速度和时间后很容易就可以计算出距离。
03 优劣势对比
| # | 三角测距激光雷达 | ToF雷达 |
| 技术实现难度 | 中 | 高 |
| 性能 | 中 | 优 |
| 成本 | 低 | 高 |
| 应用环境 | 室内短距离 | 室内长距离/室外 |
通过表格中对技术实现难度、性能、成本、应用环境四个方面的对比,可看出这两种分类方法的区别。
技术实现难度
dToF雷达的实现难点主要在2个方面,一个是SPAD在工艺和器件设计方面具有较高技术难度;另一个是dToF要求极高的计时精度和处理速度。因此,dToF技术实现难度要高于三角法。
性能
01 测量距离
三角法在室内短距离环境下,可呈现较好的测量效果。但从原理上,dToF雷达因其技术优势,可覆盖从近端到远端的广泛量程。
02 帧率
根据目前市面上的产品,三角法雷达的帧率一般不大于2kHz。dToF在完成一次测量时只需要一个光脉冲,实时时间分析也能很快响应,所以采样率能做到更高。
北极芯微最新的PCI图像传感器线阵解决了三角法受限问题,图像传感器的读取速度提升了1个数量级,大幅提升了三角法雷达的帧率,可媲美dToF。
03 精度
dToF雷达在几十米的测量范围内能保持毫米级别定位精度,而三角法在近距离下的精度虽然很高,但是随着距离越来越远,其测量的精度会逐渐变差。
绿色电力交易
成本 在扫地机等短距离雷达产品领域,相较于dToF雷达百元级价位的费用,三角法因其几十元的高性价比优势,得到厂商和用户的青睐。 应用环境
三角雷达的场景主要是在室内短距离应用,比如扫地机器人避障,而dToF因其性能优势,应用则更为广泛。再加上dToF雷达半固态的设计,使得其具有更优秀的防护效果。
总结:三角法和dToF孰优孰劣?其实并无绝对的高低之分,它们优势各异,用户需根据应用场景的不同而选择适合的方案。
编辑:黄飞
-
基于AWR1642的角雷达的短程雷达解决方案2020-12-14 10575
-
阐述基于激光三角测距法的激光雷达原理2023-12-27 2822
-
270°扫描角度的雷达和360°扫描角度的雷达有什么区别?2018-11-09 3747
-
TOF激光雷达2019-06-07 9371
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 10168
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30604
-
多普勒天气雷达网探测数据对比分析2018-02-12 935
-
激光雷达类型:TOF雷达与三角测距雷达2020-12-26 5154
-
浅述毫米波雷达技术在角雷达的应用2022-01-12 9924
-
三角测距是什么意思?三角测距原理图解2022-06-21 43090
-
单线激光雷达原理揭秘:三角测距 VS ToF测距2022-02-24 9519
-
三角法测距原理2023-07-08 9414
-
彻底理解dToF雷达系统设计2023-07-31 3430
-
思岚科技推出新一代融合型DTOF雷达产品RPLIDAR C12023-10-31 2544
-
基于激光三角测距法的激光雷达原理2023-12-25 2522
全部0条评论

快来发表一下你的评论吧 !
