

基于机器视觉的平面视觉图像色彩自适应调整系统设计方法
电子说
描述
摘 要:平面图像在光线和角度的影响下容易出现色彩缺陷的问题,但由于传统方法设计的平面视觉图像色彩调整系统的自适应效果较差,导致调整后的图像色彩差异不明显。为了解决以上问题,提出一种基于机器视觉的平面视觉图像色彩自适应调整系统的设计方法。在硬件设计上,开发以 Tiny6410核心板为基础的数据采集器,并重新设计其外围电路中的电源电路和 RS 232电路。在软件设计上,通过自适应直方图对平面视觉图像进行均衡化处理,结合机器视觉技术识别图像色彩缺陷,通过七色算法设计图像色彩调整模块。设计仿真实验,结果显示:通过此次设计的系统调整图像色彩,图像亮度未受到影响;与2组传统图像色彩调整系统相比,所设计的系统色彩调整效果更加符合预期,满足原始图像对色彩的要求。
现代科技发展逐渐走向繁荣,平面图像色彩调整技术也在不断完善的过程中。生活和工作中处处充满着平面图像,人们日常使用的产品一部分都是通过图形结合文字来介绍产品信息、产品内容以及使用方式的。为了能够保证图像的实际拍摄效果,相关学者对平面视觉图像色彩调整方法进行研究。在文献[1⁃2]的研究内容中,两者均利用 Photoshop 颜色模式和高级调整技巧对存在色彩缺陷的图像进行调整,但是两种传统方法对图像色彩的自适应调整能力较差,存在图像色彩差异不明显的问题。因此,此次研究在传统系统[3]的基础上,融合机器视觉技术,提出一种基于机器视觉的平面视觉图像色彩自适应调整系统的设计方法,以优化系统对图像色彩的自适应调整功能。
1 平面视觉图像色彩自适应调整系统硬件设计
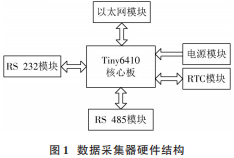
为了辅助机器视觉技术在色彩调整系统中的应用效果,在Tiny6410核心板的基础上设计开发数据采集器硬件。已知该板集成了S3C6410处理器、JTAG接口、复位电路以及 NAND FLASH等,因此设计该硬件时重点应落在外围电路上[4]。数据采集器的基本结构如图1所示。
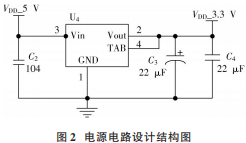
电源模块为系统提供工作电源,是实现数据采集的前提。因此利用5V电源输入,同时利用电压转换电路为色彩调整系统提供3.3 V和5V电压。电源电路的设计结构图如图2所示[5]。
为调试系统硬件与软件设计RS 232电路,如图3所示,利用该电路控制数据采集器的工作运行状态。
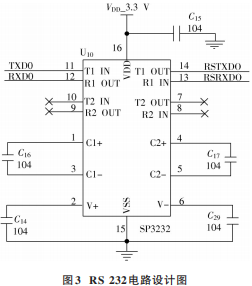
采用SP3232作为电平转换芯片,设计如图3所示的RS 232电路,转换电平信号[6]。至此实现平面视觉图像色彩自适应调整系统的硬件设计。
2 设计平面视觉图像色彩自适应调整系统软件
2.1自适应直方图均衡化平面视觉图像
为了实现对图像色彩的自适应调整,在HSI中对图像强度处理。直方图均衡化的函数映射方式公式为:

式中:f (λ)表示映射函数;λ表示输入的灰度级;i表示灰度级;z(i)表示直方图分量;N表示像素总数;H表示灰度级的数量[7]。在灰度级局部化的情况下,可利用式(1)进行映射。通过机器视觉的感知设置剪辑限值μ,当变化量小于差别阈限值JND时,机器视觉技术无法感觉图像亮度的变化情况。已知差别阈限值曲线与平均背景亮度有关,因此假设平均背景亮度为A(x,y),则存在下列关系式:
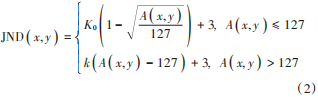
式中:(x,y)表示图像坐标;K0表示背景灰度级为零时的可见度阈值;k表示较高背景亮度下,函数建模的曲线斜率。如果JND值过高,则不能充分增强图像色彩的边缘细节[8]。因此,为了增强细节,同时防止光晕伪影,将灰度级λ的斜率设置为与JND相同的值。假设像素强度与背景亮度相似,则灰度级λ的限幅μ(λ)为:

式中f′(λ)表示剪切后直方图的映射函数。设置色彩对比度增强调节方案,根据全局直方图,调整局部直方图的过度增强问题;根据输入强度保护局部区域的相对亮度,得到精确的映射结果。
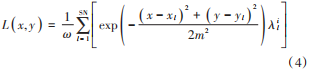
式中:L(x,y)表示均衡化后的映射结果;ω表示归一化因子;SN表示近局域的像素数量;xl,yl表示第l个区域的像素坐标;m表示常数;λil表示修改后的灰度级[9]。根据上述自适应直方图均衡化方法,设计调整系统的自适应处理程序,实现对图像的灰度处理。
2.2均衡化处理后基于机器视觉识别图像色彩缺陷
均衡化处理后,利用机器视觉技术,识别调整图像存在的色彩缺陷问题。首先将图像物体色彩与背景色彩进行分割,下列公式为图像背景色彩分割结果:

式中:IMG0(x,y)表示原始彩色图像;IMG1(x,y)表示移除背景色彩后的图像;IMG2(x,y)表示掩模图像[10]。由于辐射亮度存在动态变化特性,因此根据朗伯反射定律,假设分割后图像上随机一个点的亮度为I1,入射光的强度为I2,光源之间连线的夹角为α,则存在如下所示的关系方程:

对于应用机器视觉的调整系统来说,任意点的入射光强度可默认为相等,因此夹角α是导致色彩不均匀的主要原因。则可以根据下列方程,对图像亮度进行校正:

式中:IRi表示第i个像素校正后的亮度值;Ii表示某一区间内,第i个像素的亮度值;IH表示所有像素点的平均亮度。当存在Ii《IH时,则式(7)的计算结果[11]小于255。根据校正后的亮度,识别存在色彩缺陷的图像像素位置,得到:

式中:SD值表示识别到的缺陷指数;M表示缺陷候选区内的像素数目;qi表示缺陷候选区的第i个像素灰度值;qˉ表示所有的像素灰度平均值。根据上述结果确定图像色彩缺陷区域,实现系统对图像色彩缺陷的识别定位[12]。
2.3 设计图像色彩调整模块
根据七色算法和上述对图像的处理过程,设计图像色彩调整模块。整个算法模块由RGB信号合成模块、七色拆分模块、调整模块组成。
首先,利用七色拆分模块拆分RGB图像信号,发送到七色调整模块中,对各个参数进行调整,更改RGB图像的色彩分量。然后,将运算结果上传到信号合成模块,叠加单色RGB色彩分量,得到调整后的平面视觉图像色彩并输出[13]。要求每个七色算法模块均支持24位色彩输入,根据实际添加的模块数,支持48位、72位的图像色彩输出[14]。最后,经过拆分利用不同的系统参数,在白色调整模块中进行调整,得到白色的RGB色彩分量。该过程中的部分关键代码如下:
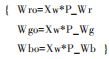
其中P_Wr,P_Wg以及P_Wb用来描述拆解后白色RGB的参数,其取值在(0,1)范围内。利用基色调整模块对图像的色调、饱和度、亮度增益进行再次调整,从而实现基色的调整。再利用补色调整模块对色调、饱和度、亮度增益进行补色调整[15]。最后根据色彩相加原理,将调整后的七色RGB色彩分量进行组合,得到最终的RGB数据并输出。至此实现基于机器视觉的平面视觉图像色彩自适应调整系统的设计。
3 仿真实验
3.1图像亮度测试
利用此次设计的色彩调整系统,对某一存在色彩缺陷的平面视觉图像进行色彩自适应调整,结合13点法对调整后的图像进行亮度测试。图4为13点分布状态图。
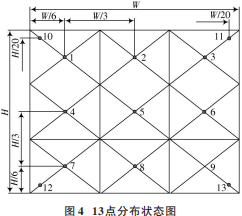
图中,W,H分别表示系统显示屏幕的宽度和高度。采用xyY色度,测试图像调整后中心点的色坐标和亮度参数。
1)测试图像的屏前亮度。在相同亮度的测试环境中,默认其白色的屏前亮度值为L,将亮度计贴在图4中的第5点处。
2)测试色度不均匀程度。保证亮度条件不变,通过下列公式计算调整后的图像色度不均匀程度:

式中:Δx,Δy表示图像色度不均匀的位置;i∈[0,N],表示单元个数;xi,yi表示各显示单元中心点,也就是第5点的坐标。
3)测试图像的亮度均匀性。实验测试条件相同,测试白色亮度显示的一致性,计算公式为:
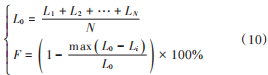
式中:L0表示亮度平均值;N表示测试点个数;L1,L2表示不同测试点的亮度;Li表示中心点亮度值;F表示亮度一致性。利用上述3个步骤,测试图像的亮度效果,发现得到的数据与预期相近,说明此次设计的系统在调整平面视觉图像色彩缺陷等问题时能够保证图像的亮度,满足使用要求。
3.2 增益和亮度线性关系测试
测试系统调整色彩过程中,调整白色增益值后的屏前亮度值,结果如表1所示。
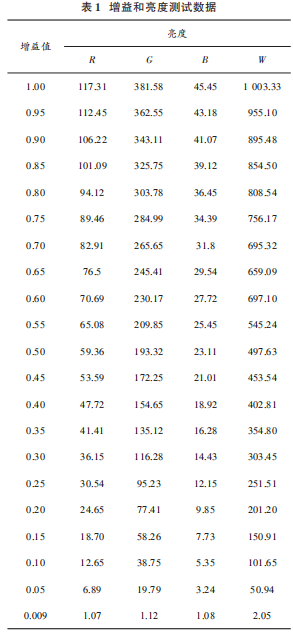
根据表1中的测试数据,绘制增益、亮度变化关系曲线。根据曲线变化趋势,可以证明增益与亮度之间存在线性关系,因此验证了此次设计的调整系统,可以用来调整平面视觉图像进行色彩缺陷。
3.3 图像色彩调整效果测试
将本文设计系统与两个传统色彩调整系统进行对比,对同一存在色彩缺陷问题的图像进行自适应调整。图5为不同系统应用下,图像的差异色彩的分布状态示意图。
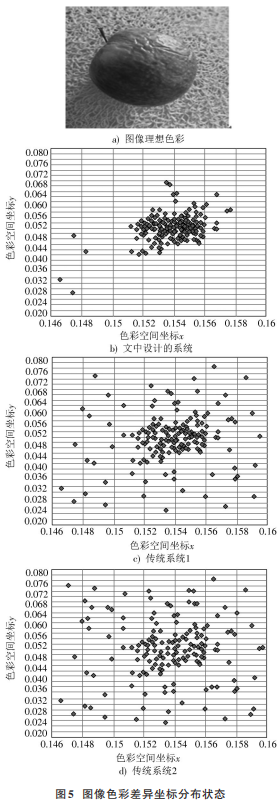
从图5所示的3组测试结果可以看出,只有文中系统应用下的图像,其差异色彩坐标集中在中心位置,而两个传统系统调整后,图像的差异色彩坐标分布相对分散,可见其色彩调整效果并不理想。
4 结 语
为了提高平面图像色彩的自适应调整能力,提出基于机器视觉的平面视觉图像色彩自适应调整系统设计方法。在机器视觉技术的帮助下,结合硬件与软件的双重设计,实现了对平面视觉图像色彩的自适应调整,一定程度上改善了平面图像经过调整后的色彩差异度的问题。但在设计过程中发现,该系统的运算程序较为复杂,可能会影响系统的运行效率。因此,在今后的研究工作中,可以优化系统软件设计步骤,将图像数量作为测试变量,分析长时间的工作条件下,系统是否可以高效运行,进一步提升系统对平面图像的自适应调整能力。
审核编辑 :李倩
-
机器视觉的镜头选择2012-10-22 3327
-
不可忽视色彩对机器视觉系统的影响2012-12-14 3399
-
机器视觉与计算机视觉的关系简述2014-05-13 3281
-
机器视觉应用案例简析2015-11-18 5895
-
机器视觉技术2016-01-17 5510
-
基于labview机器视觉的图像定位2017-03-31 12381
-
机器视觉系统应用于标签外观视觉检查!2019-11-18 2843
-
色彩视觉的应用让机器视觉检测设备更加强大!2019-12-11 2236
-
机器视觉系统技术简介!(干货分享建议收藏)2019-12-17 3529
-
基于ZYNQ的机器视觉应用2020-09-16 2302
-
四元数数控:深圳机器视觉技术是图像处理吗?2021-12-23 844
-
基于DM642机器视觉系统的设计与实现2023-09-20 941
-
基于双目视觉模型的自适应控制2010-01-11 824
-
为自适应机器人焊接开发WiseWELDING机器视觉系统2010-03-11 1106
-
应用机器视觉系统进行导航机器人的设计2018-09-30 8305
全部0条评论

快来发表一下你的评论吧 !
