

KUKA机器人程序可以使用扭矩限制避免在碰撞时发生损坏
机器人
555人已加入
描述
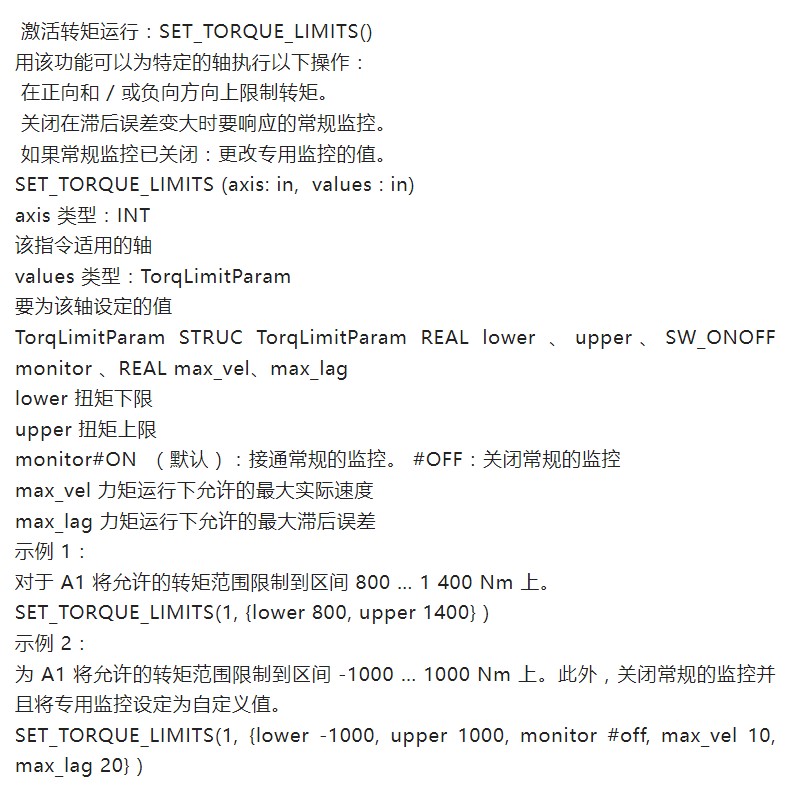
可以使用扭矩限制避免在碰撞时发生损坏。
优势:确保了机器人只用特定的有限作用力压向障碍物。
缺点:机器人边迟钝。不再能高加速。
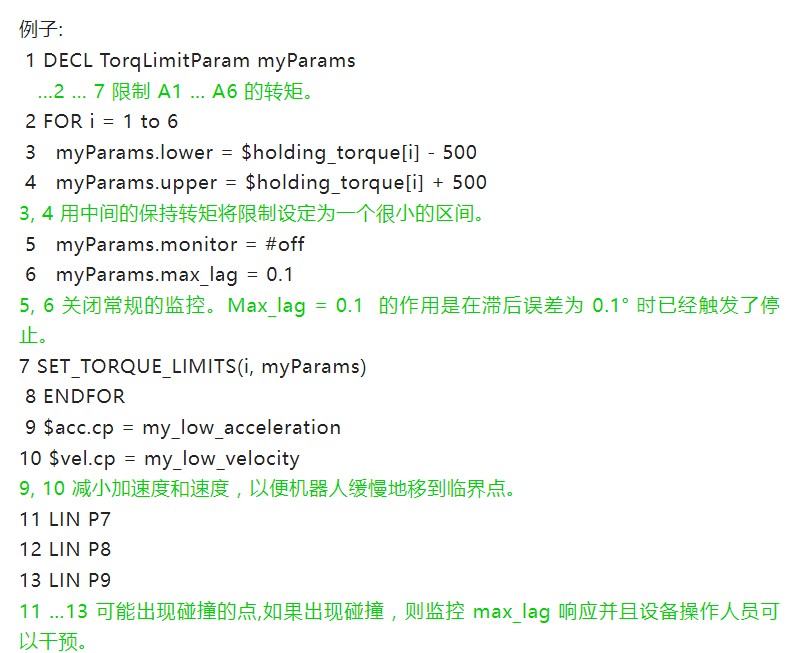
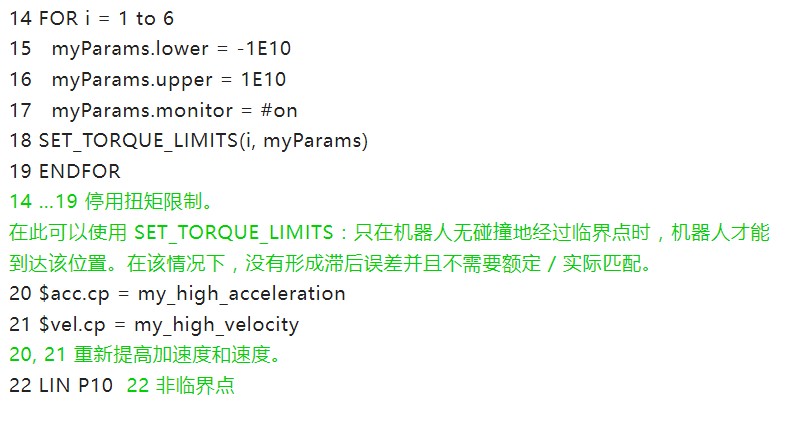
机器人从箱子中取出工件。在运动至点 P7、P8 和 P9 时,可以排除机器人与工件一起挂在箱子上。应确保机器人不会大力压紧致使形成损坏。为此,在临界点之前限制作用力。
关闭常规的监控。不因为否则将不必要地触发监控,而是因为与该示例相反它们不够严格。取而代之,将其中一个专用监控设定为一个很小的值。(取决于具体的应用情况,这对使用常规监控也很有意义。)
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
为什么说关节扭矩传感器是高端机器人的“触觉神经”?2026-04-17 936
-
人形机器人关节扭矩传感器的详细应用场景及解决方案2026-05-20 271
-
酷卡机器人提示要求调零的目的是什么?2015-01-14 6136
-
智能机器人对于传感器的需求2015-01-20 6843
-
KUKA重型机器人2015-02-03 8367
-
未来机器人发展关键——多传感系统2015-02-04 5294
-
求KUKA机器人控制柜三维模型2016-04-18 6499
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4151
-
盘点工业机器人常见的六种传感器类型2018-11-08 3470
-
KUKA机器人问题解答2019-07-15 2658
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12445
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8040
-
库卡机器人MGV电源模块维修2021-09-08 1905
-
KUKA机器人伺服驱动模块维修2021-09-17 1909
-
一文详解KUKA机器人的碰撞识别2020-09-19 28775
全部0条评论

快来发表一下你的评论吧 !
