

基于无线电移动机器人定位系统技术分析
机器人
描述
对于移动机器人,定位技术是保证移动机器人轨迹/运动作业的前提技术,特别是跟踪作业的基础。
与自动驾驶车辆定位不同,小型移动机器人更需要的是定位精度。根据作业环境,小型移动机器人定位技术可以视为室内定位系统(Indoor Location System, ILS)。小型移动机器人定位技术不同于机械加工领域的定位技术,从关键词上可以明显区别“Location/Localization”与“Position/Positioning”。Localization 指的是机器人在作业空间内的自身的位置关系问题,position 是会指向更精密的点问题。
本文的主要内容包括:室内定位测量原理(物理属性)[1],室内定位技术,定位模型方法,定位算法,定位系统评价因子,基于惯导的定位系统,基于无线电网络的定位技术,集群定位算法。
室内定位测量原理
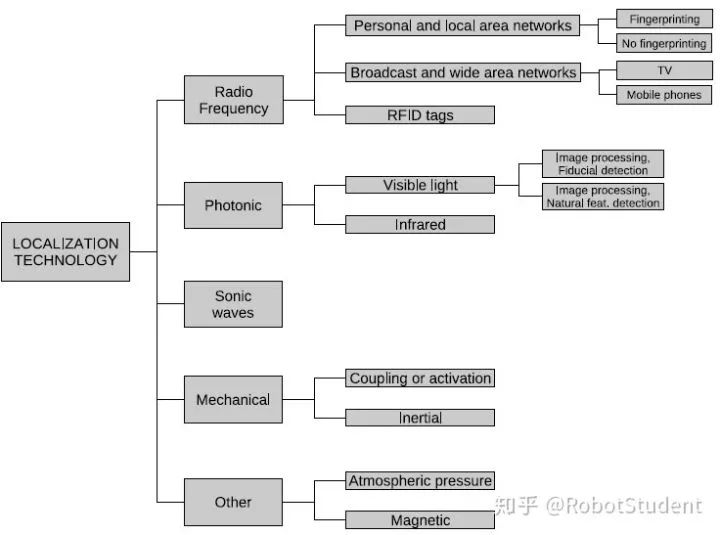
无线电频谱与电磁波
(1)个人或区域互联网,包括IEEE 802.11, Ultra-Wideband (UWB),ZigBee, 或者 Bluetooth。
采指纹基定位方法
邻近技术
贝叶斯统计匹配
极大似然估计
关联判决(Correlation discriminant kernel selection)
神经网络
非采指纹基定位方法
几何学
(2)区域广播网络,包括定位目的的网络,例如GPS/GNSS,以及具有定位功能多的网络,例如智能手机网络、电视广播信号。
电视信号
胞元网络(智能手机)
(3) RFID 标签 (4)雷达 光子能场 (1)图像分析,自然特征提取与识别(场景图片)
移动相机系统
固定相机系统
(2)图像分析与特征点标记(二维码定位)
此外,还有声波、机械能(惯性/接触)、地球磁场、大气压。
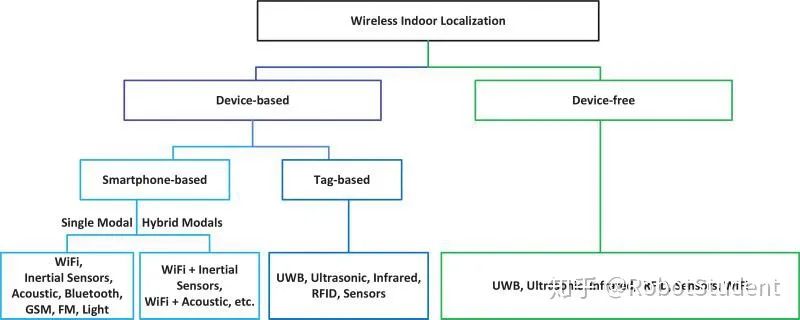
无线电室内定位系统分类[2]
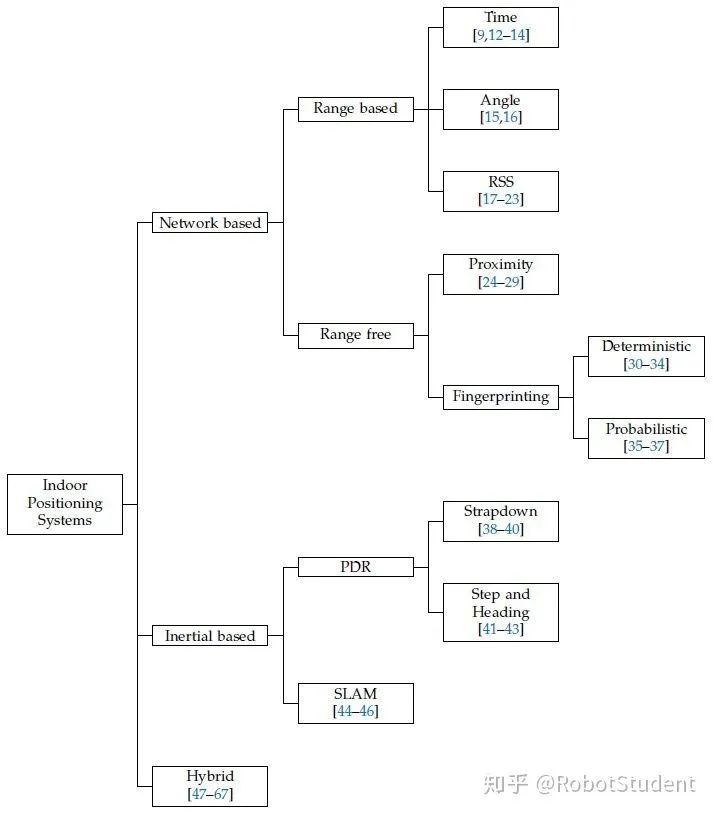
室内定位技术
室内定位服务系统Indoor Location Based Services (ILBS)可以简单地分为三类[3]:
1、网络系统:基于无线网络
2、惯性系统:机载惯导系统预估定位
3、混合系统:融合无线网络与惯性系统的混合系统
RSS-IMU 混合系统
基于地图的混合系统
基于智能手机的混合系统
室内定位模拟方法分类
1、angle of arrival(AoA) 技术:根据到达信号角度
2、time of arrival(ToA) 技术:根据到达信号时间(类似雷达测距)
3、fingerprinting 技术,即特征技术
室内定位模拟算法
1、三角定位(Triangulation),需要借助固定基站或者已知基站位置信息,GPS等无线网络定位法。
2、邻近(Proximity), 使用具有有限的感知范围和分析能力的传感器,RFID。
3、场景分析(Scene analysis),利用场景画面中的特征完成定位分析,点云和3D重构技术,机器视觉。
4、航位推算(Dead reckoning),基于先验信息推算出运动轨迹,惯导、捷联惯导。
定位算法
按照文献[5],基于静态传感器节点的定位技术广泛应用于移动机器人跟踪功能,定位算法可总结为:
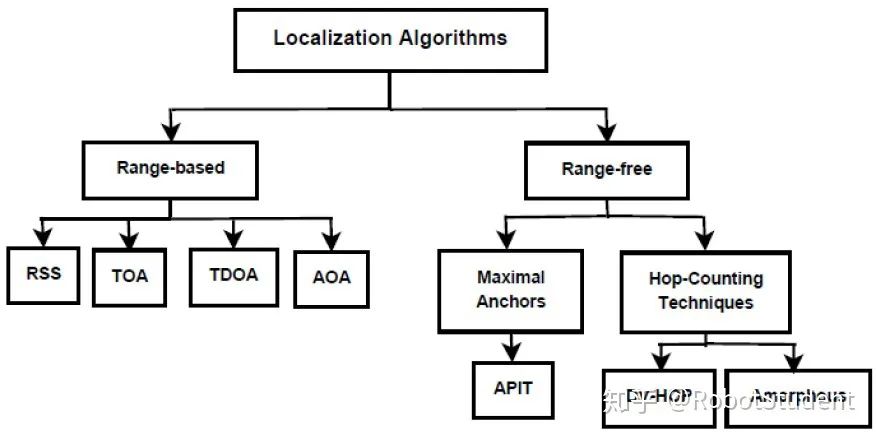
1、范围基定位(Range-based localization)
time-of-arrival (TOA) – based 定位. 联合最小二乘估计 the Least-Square Estimate
time-difference-of-arrival (TDOA) – based 定位. 协同定位
Angle-of-arrival (AOA) – based 定位.
received signal strength (RSS) – based 定位,联合最大似然估计Maximum likelihood estimate
MDS Based 定位,联合奇异值分解 Singular Value Decomposition (SVD)
Channel Impulse Response Based fingerprinting 定位
2、无范围基定位(Range-free localization)
Approximate Point in Triangle Test (APIT)
Centroid-based 定位
Monte-Carlo 定位
DV-Hop based 定位
Closer point based 定位
Based Coordinates (ABC) localization method
定位计算补偿方法Implementation methods
1、机器学习方法 Machine Learning Based Methods:
least square support vector machine and Gaussian processes ,Semi-supervised Laplacian regularized least squares method and HMM based RSS-EKF (Extended Kalman Filter) method using RSS
2、集中和分布式方法Centralized and Distributed Methods
3、多传感器数据融合方法Multi-Sensor Data Fusion Methods
4、采指纹方法Fingerprinting Based Methods
跟踪算法分类(Broad classification of tracking methods):
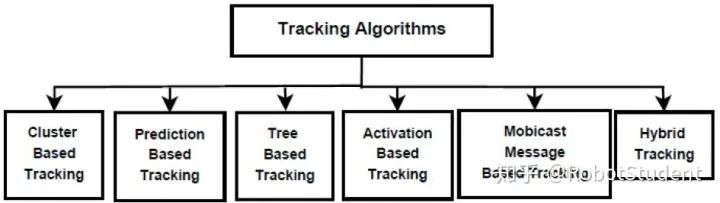
1、聚类跟踪算法 Cluster-based tracking methods, dynamic clustering algorithm for target tracking
2、预测跟踪算法 Prediction-based tracking methods
3、树基跟踪算法 Tree-based tracking methods
4、主动跟踪算法 Activation-based tracking method
5、Mobicast基跟踪算法 Mobicast-based tracking method
室内定位方法评价
1、精度与误差
2、环境适应性。场景对定位系统测量精度影响,一个高性能框架能够避免对重复定位差异
3、消耗:带宽、寿命、能耗、权重与额外设备
4、基站数量
基于惯导的定位系统
惯性导航与定位技术可以分为两类:
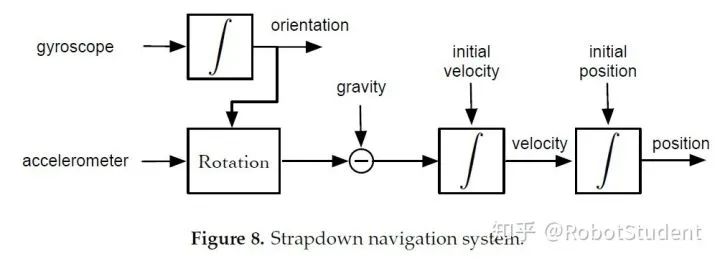
捷联惯导系统Strapdown systems: 采用两次积分预测运动
步进与航向系统Step and Heading Systems (SHS): 通过表示步进长度与航向的惯性定位向量预测位置
参考下图,惯导定位系统通过二次积分获得定位信息[6]
一个经典的具有定位功能的移动机器人控制系统架构如下图所示,该系统通过无线电、里程计以及惯性测量单元实现自定位功能[7]。
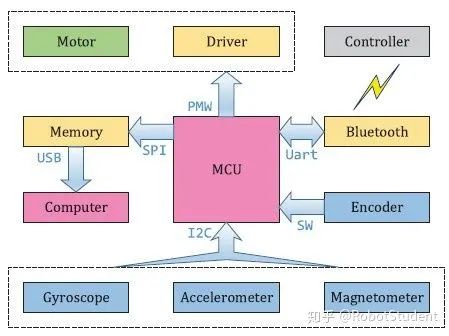
微型惯性测量单元,包括陀螺仪、加速度计、磁偏角计、温度和气压等功能,通过物理模型和误差模型推算。
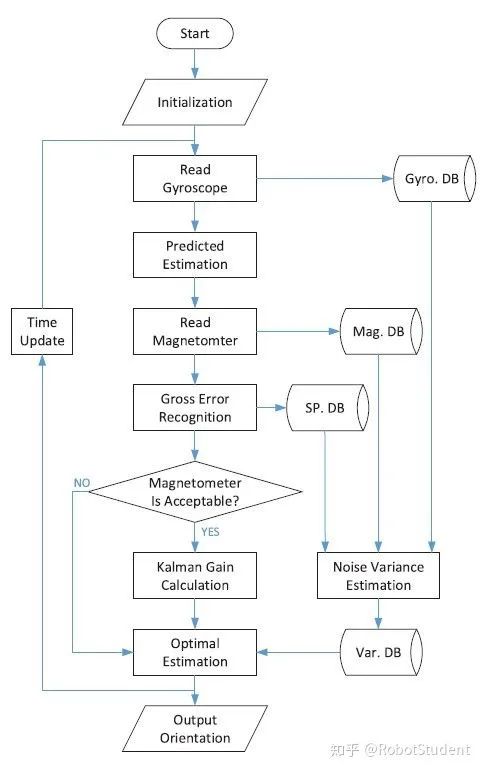
扩展卡尔曼滤波算法EKF与粒子滤波器是移动机器人群体定位中最为广泛,尤其在RoboCup等机器人大赛[7]。
基于无线电定位系统
最流行的室内无线电点位技术方法为RSSI定位算法,是采用AP终端设备组件的网络,通过检测信号功率推算距离,再利用定位模型获取定位信息,最常见的终端是ZigBee。
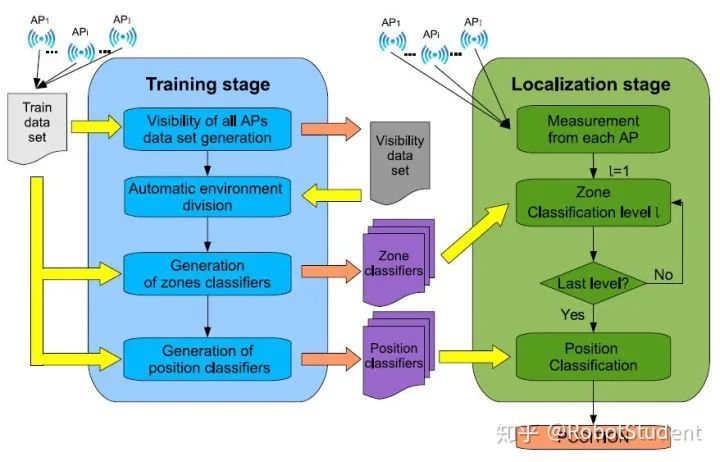
参考[8]
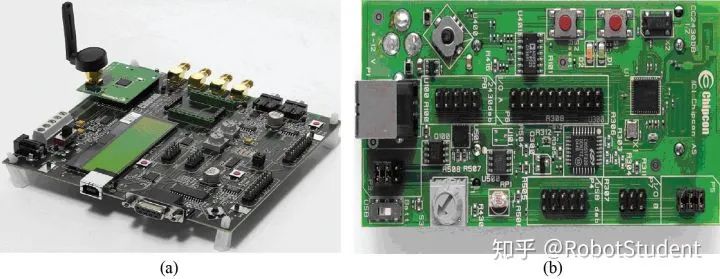
基于ZigBee组件的微型定位系统
集群定位系统
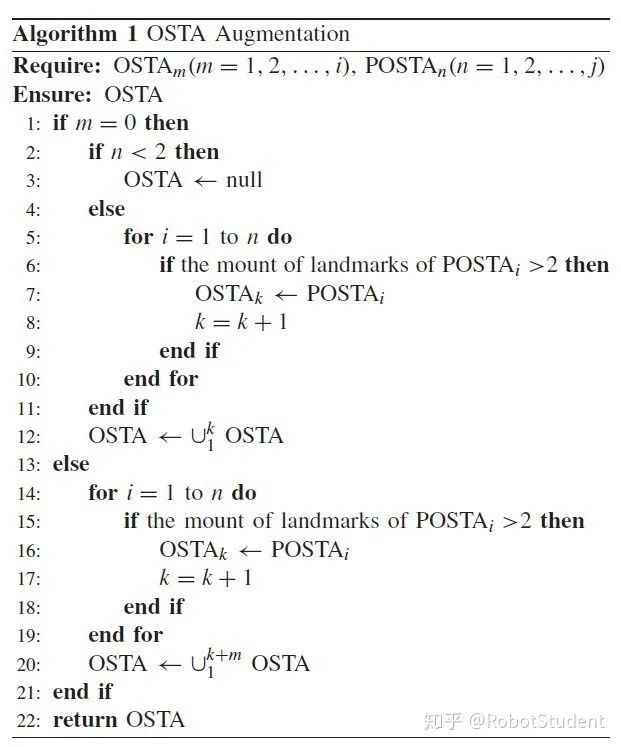
参考文献[9][10],集群类机器人定位技术,不仅可以依靠静态基站进行定位,还可以利用机器人之间无线电终端辅助其它终端进行定位。

算法1 [9]
因为集群定位存在很大的噪声干扰,因此需要对采集到的信息进行去噪处理,或者提高系统抗干扰能力,采用统计算法提高定位系统精度。如在文献[10],采用了卡尔曼滤波器对定位优化。
文献[10]-算法1
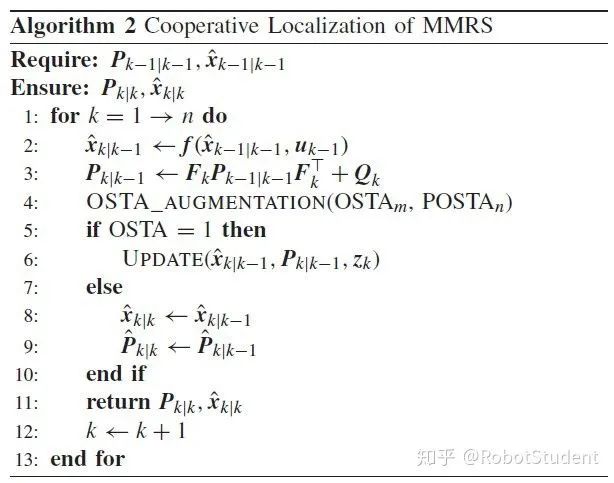
文献[10]-算法2
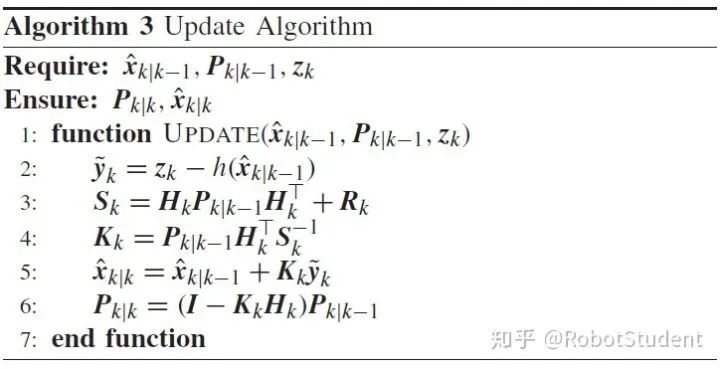
文献[10]-算法3
总结
本文大部分内容是根据综述文章对现用的室内定位进行总结,考虑到微型运动机器人的工程成本以及计算力,本文所讨论的室内定位技术并不是应用于自动驾驶的SLAM和VSLAM技术。
同时,本文提到了定位跟踪技术,在寻迹控制中个人倾向采用视觉方向。对于粗精度的定位系统,可以采用基于ZigBee的RSSI定位系统,此外可以融合IMU单元提高系统定位精度。
参考文献:
[1] Torres-Solis, J., H., T., and Chau, T., 2010, “A Review of Indoor Localization Technologies: Towards Navigational Assistance for Topographical Disorientation,” Ambient Intelligence, F.J. Villanueva Molina, ed., InTech.
[2] Kivimäki, T., Vuorela, T., Peltola, P., and Vanhala, J., 2014, “A Review on Device-Free Passive Indoor Positioning Methods,” International Journal of Smart Home, 8(1), pp. 71–94.
[3] Alejandro Correa, Marc Barcelo, Antoni Morell, and Jose Vicario, 2017, “A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications,” Sensors, 17(8), p. 1927.
[4] Mrindoko, N. R., and Minga, D. L. M., 2016, “A Comparison Review of Indoor Positioning Techniques,” 21(1), p. 9.
[5] Kumar, S., and Hegde, R. M., “A Review of Localization and Tracking Algorithms in Wireless Sensor Networks,” p. 12.
[6] Lv, W., Kang, Y., and Qin, J., 2019, “Indoor Localization for Skid-Steering Mobile Robot by Fusing Encoder, Gyroscope, and Magnetometer,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, 49(6), pp. 1241–1253.
[7] Li, D., Chen, Q., and Zeng, Z., 2018, “Self-Localization Algorithm of Mobile Robot Based on Unscented Particle Filter,” 2018 37th Chinese Control Conference (CCC), IEEE, Wuhan, pp. 5459–5464.
[8] Hernández, N., Alonso, J. M., and Ocaña, M., 2017, “Fuzzy Classifier Ensembles for Hierarchical WiFi-Based Semantic Indoor Localization,” Expert Systems with Applications, 90, pp. 394–404.
[9] Safavi, S., and Khan, U. A., 2017, “An Opportunistic Linear–Convex Algorithm for Localization in Mobile Robot Networks,” IEEE Transactions on Robotics, 33(4), pp. 875–888.
[10] Sun, Q., Tian, Y., and Diao, M., 2018, “Cooperative Localization Algorithm Based on Hybrid Topology Architecture for Multiple Mobile Robot System,” IEEE Internet of Things Journal, 5(6), pp. 4753–4763.
编辑:黄飞
-
轮式移动机器人电机驱动系统的研究与开发2025-06-11 395
-
Labview My RIO 移动机器人2016-08-21 13635
-
想设计炫酷的移动机器人?视觉定位设计方案分享给你!2019-06-01 2945
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3807
-
如何实现移动机器人的设计?2020-11-23 3313
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2990
-
什么是移动机器人软硬件系统问题2021-08-06 2519
-
详解移动机器人软硬件系统问题2021-11-11 2574
-
基于地图的移动机器人定位技术新进展2009-07-10 610
-
基于GPS/GIS/GSM 的移动机器人定位技术研究2009-08-13 831
-
移动机器人激光全局定位系统的算法研究2015-12-18 882
-
基于正交编码器和陀螺仪的轮式移动机器人定位系统2017-12-12 3223
-
如何才能实现移动机器人的导航定位和地图构建技术2020-07-01 1533
-
移动机器人的导航定位和地图构建技术综述2020-07-28 2173
-
机器人定位是如何实现的?2023-06-12 2143
全部0条评论

快来发表一下你的评论吧 !
