

LIN总线的基础知识
接口/总线/驱动
描述
前几天小编画点时间看了一些关于LIN总线基础的内容,把其中的关键点提取了出来,在这里分享给大家。在这里你可能要问“不都有CAN总线了吗?这个LIN总线又是从哪里来的?”其实理由很简单,就是CAN总线太贵啦!处处都用CAN总线的话,那整车的总线架构成本将会变得很高!在一些比如车身电子配件的地方(如车窗、后视镜、大灯、车锁等),我们不需要报文像CAN总线上传输的那样“高速”!各大厂商一拍脑门就研究了这个LIN总线!
什么是LIN总线?
LIN(Local Interconnect Network)总线是基于UART/SCI(通用异步收发器/串行接口)的低成本串行通讯协议。其目标定位于车身网络模块节点间的低端通信,主要用于智能传感器和执行器的串行通信,而这正是CAN总线的带宽和功能所不要求的部分。
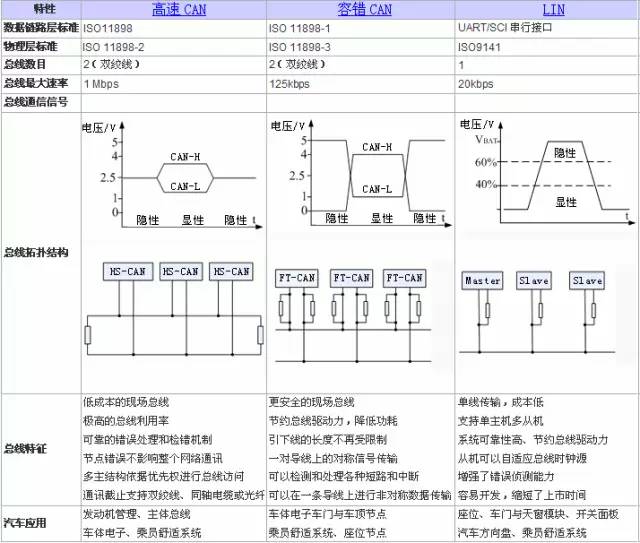
CAN/LIN总线去区别
由于LIN网络在汽车中一般不独立存在,通常会与上层CAN网络相连,形成CAN-LIN网关节点。

LIN总线的主从关系
LIN总线采用的是单线传输形式,应用了单主机多从机的概念,总线电平一般为12V,传输速率最高限制为20kbps。由于物理层的限制,一个LIN网络最多可以连接16个节点。
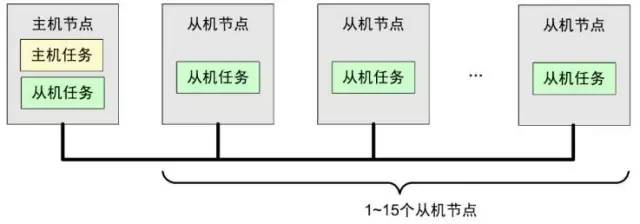
总线任务负责:
(1)调度总线上帧的传输次序(2)监测数据,处理错误(3)作为标准时钟参考(4)接收从机节点发出的总线唤醒命令
从机任务不能直接向总线发送数据,需要接受到主节点发送的帧头后,根据帧头所包含的信息来判断:(1)发送应答(2)接收应答(3)既不接收也不应答
LIN的特点:
(1)网络由一个主节点与若干个从节点构成。(2)使用LIN总线可以大幅度削减成本。(3)传输具有确定性,传播时间可以提前计算(4)LIN具有可预测的EMC(电磁兼容性)性能,为了限制EMC的强度,LIN协议规定最大传输速率为20kbps。(5)LIN总线提供信号的配置、处理、识别和诊断功能。
LIN报文帧结构
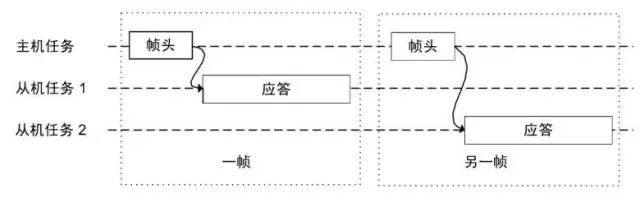
LIN报文帧包括帧头(hearder)与应答(response)两部分。主机负责发送至帧头;从机负责接收帧头并作出解析,然后决定是发送应答,还是接收应答或不回复。
帧头结构包括同步间隔段、同步段、PID段(受保护ID)段,应答部分包括数据段与效验和段。其中值“0”为显性电平、“1”为隐性电平,这点与CAN总线相类似。在总线上实行“线-与”:当总线有至少一个节点发送显性电平时,总线呈现显性电平;所有节点均发送隐性电平或者不发送信息时,总线呈隐性电平,即显性电平起着主导作用。
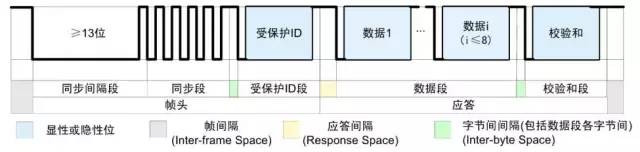
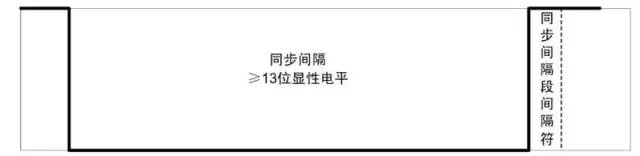
(1)同步间隔段
同步间隔段至少是由13位的显性电平组成,由于帧中的所有间隙或者总线空闲时总线均保持隐性电平状态。所以同步间隔段可以标志一个帧的开始。其中同步间隔段的间隔符至少为1位隐性电平。
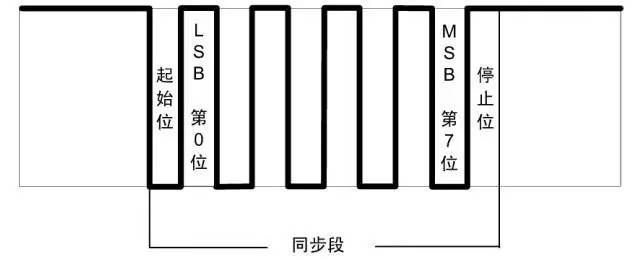
(2)同步段
LIN同步以下降沿为判断标志,采用字节0x55(01010101b)进行同步。在从机节点上可以不采用高精度的时钟,由此带来的偏差,需要通过同步段来进行调整。
(3)PID段
受保护的ID的前6位叫做帧的ID,加上两个奇偶效验码后称作受保护的ID。帧ID的取值范围为0x00~0x3f总共64个,帧ID标识了帧的类别和目的地。从机任务会根据帧头ID作出反应(接收/发送/忽略应答)。其中P0与P1效验如下(⊕为异或,
-
LIN总线的基础知识2023-11-08 7109
-
LIN总线相关知识2025-12-10 355
-
什么是汽车LIN总线#lin学习电子知识 2022-09-23
-
LIN通信的调度表及帧类型#汽车Lin总线北汇信息POLELINK 2023-06-06
-
LIN总线网络管理与状态管理#汽车Lin总线北汇信息POLELINK 2023-06-07
-
LIN总线错误类型介绍#lin总线 #汽车电子北汇信息POLELINK 2024-12-21
-
萌新求助,求大佬分享pcie总线基础知识2021-10-26 1579
-
LIN是什么LIN总线的入门资料免费下载2019-03-21 2899
-
LIN总线是什么?CAN/LIN总线的区别与结构2021-03-17 30287
-
LIN础知识和8位PIC单片机上实现的MCC LIN协议栈库2021-04-01 1286
-
全面介绍PCIe总线的基础知识2021-12-14 1452
-
CAN总线的基础知识详细讲解2022-04-02 1420
-
CAN总线基础知识2023-02-09 5832
-
什么是LIN总线?车载总线之LIN总线概述2023-07-26 23040
-
LIN基础知识和8位PIC单片机上实现的MCC LIN协议栈库2023-09-25 1288
全部0条评论

快来发表一下你的评论吧 !
