

三相电机的方波驱动原理
工业控制
描述
采用方波驱动时,每次只给三相电机中的两相通电:一相连接到电源的 正极,一相连接到电源的负极,一相浮空。电流从电源的正极流入,进入其 中一相,并从电机的另一相流出到电源的负极。如图1所示,假设某一时刻,与A相连接的两个功率管Q1和Q2关断,电 机的A相浮空;与B相连接的上桥臂功率管Q3开通,B相连接到电源的正极。为了防止短路,上下两个功率管不能同时开通,因此Q3开通的时候,Q4必须 关断。与C相连接的上桥臂功率管Q5关断,下桥臂功率管Q6开通,C相直接与 电源的负极连接。此时,电流从电源的正极进入Q3,流入电机的B相,并从电 机的C相流出,最后通过C相的下桥臂功率管Q6进入电源的负极。
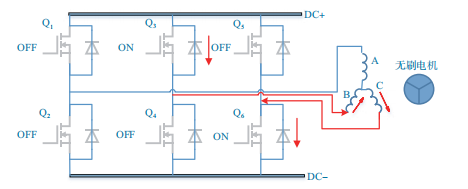
图 1
逆变器驱动电路 通电线圈产生磁场,在定子磁场的作用下会产生一定角度的旋转。如 果这个时候根据霍尔传感器的输出状态,改变功率管的开通顺序,转子会持 续转动到下一个位置。根据霍尔传感器的输出状态,并按表1进行周期性 通电,那么转子会不停地从一个位置运动到另一个位置,从而周期性地旋转 起来。
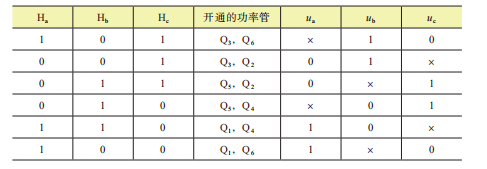
表1
每一次改变通电顺序,称为一次换向,一个电周期共需要6次换向, 这就是人们常说的六步换向。旋转时,定子磁场和转子磁场始终保持适当的 角度差,要使电机产生的力矩增大,可以适当调整定子磁场领先转子磁场的 角度。表2是转子逆时针旋转时的霍尔传感器输出状态与各相通电顺序,即 5→1→3→2→6→4。顺时针旋转时,顺序正好相反。转子旋转时,霍尔传感器输出状态会随着转子磁极移动而改变。因为三相间隔120°电角度摆放,因此3个霍尔传感器的输出信号波形也是互相间隔 120°电角度。表 1霍尔传感器输出状态与换向顺序 Ha Hb Hc 开通的功率管 ua ub uc 1 0 1 Q3,Q6 × 1 0 0 0 1 Q3,Q2 0 1 × 0 1 1 Q5,Q2 0 × 1 0 1 0 Q5,Q4 × 0 1 1 1 0 Q1,Q4 1 0 × 1 0 0 Q1,Q6 1 × 0 每个霍尔传感器的输出状态会每隔180°改变一次,三相霍尔传感器将整 个平面划分为6个扇区,每隔60°电角度,3个霍尔传感器的输出状态组合会 改变一次。根据霍尔传感器的状态,不断改变三相通电顺序,便可形成旋转磁场, 使电机转动起来。霍尔传感器的输出状态与位置关系如图2所示。
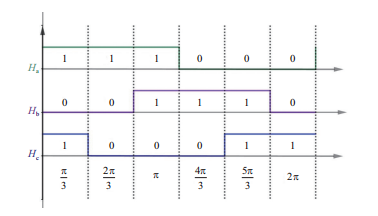
图2
图 2 霍尔传感器的输出状态与位置关系 直流电机的转速和电压是成正比的,如果想改变转速,改变开通的功率 管的PWM占空比即可。这样一来,加在电机相线上的等效电压就会改变,相 当于直流有刷电机的调压方式。常见PWM的调节方式有以下3种。
(1)H_PWM/L_ON,即其中一相的下桥臂一直开通,只调节另一相的 上桥臂。比如第一个状态,Ub给正、Uc给负,Q3和Q6开通,电流从电源的正极经Q3流向电机的B相,再经C相流出,并经Q6进入电源的负极。此时可以只 调节上桥臂Q3的占空比,而Q6一直打开。
(2)H_ON/L_PWM,即其中一相的上桥臂一直开通,只调节另一相的 下桥臂。比如Q3常开,只调节Q6。
(3)H_PWM/L_PWM,即两相桥臂对应的功率管互补调节。比如,某 个区间内,Q3和Q4为一组互补输出,Q5与Q6为一组互补输出,Q1和Q0关断。互补的好处是,上管关断的瞬间电流可以由下管续流,而不经过功率管的内 部续流二极管,可以避免大电流损害功率管。PWM频率一般在20kHz左右,一是因为功率管的能力有限,二是为了尽 量避免高次谐波的干扰。
审核编辑:汤梓红
-
三相电机驱动原理图设计资料2025-12-24 345
-
三相电机的三相分别是什么?三相电机缺相能启动吗?2023-03-25 10510
-
步进电机的驱动与控制 三相步进电机的驱动电路2023-03-20 1141
-
三相无刷直流电机原理2023-03-15 10154
-
三相直流无刷电机驱动电路图解2023-03-07 64217
-
三相电机怎么装成两相电机 如何测量三相电机的好坏2023-03-06 5988
-
三相电机缺相的表现_三相电机启动不了嗡嗡作响2023-03-03 12505
-
三相全波无刷电机的位置检测2023-02-24 3192
-
三相无刷电机的结构、工作原理及驱动方法2023-02-12 26867
-
如何对三相无刷电机驱动器进行仿真?2021-07-21 1734
-
三相无刷电机驱动,三相无刷调速电机,三相无刷落地扇电机2017-11-24 3643
-
三相直流12-24V无刷电机驱动方案,三相正弦波电机24V风扇方案2017-03-30 5245
-
三相直流无刷电机驱动板设计2016-05-05 1984
-
三相方波逆变电路2009-04-10 5839
全部0条评论

快来发表一下你的评论吧 !
