

KUKA机器人C4配置自动外部控制的步骤
机器人
描述
配置自动外部:
如果机器人程序要由上级控制器(例如PLC)集中控制,则可以使用”自动外部”界面来执行。
上级控制器通过自动外部接口将用于机器人过程的信号(例如运动使能,故障确认,程序启动等)传输到机器人控制器。机械手控制器将有关操作状态和故障状态的信息传输到上级控制器。
为了启用自动外部接口的使用,必须执行以下配置:
| 1 | CELL.SRC程序的配置。 |
| 2 | 自动外部接口的输入/输出配置。 |
配置CELL.SRC
在自动外部模式下,使用程序CELL.SRC调用Folgen。
1.在主菜单中,选择启动>服务> CELL配置。
2.在“现有程序”窗口中,选择要插入到CELL.SRC中的程序,然后按添加软键。
3.如果需要,请重复步骤2将其他程序插入CELL.SRC。
4.按确定。响应确认请求,询问是否应保存更改。
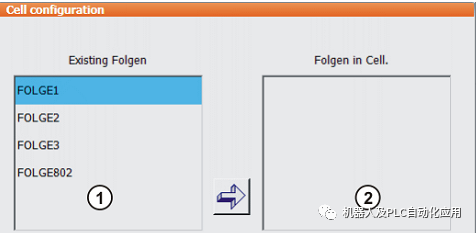
1.可用于配置CELL.SRC的所有Folgen将显示在“现有Folgen”窗口中。
2.位于CELL.SRC中的所有Folgen都显示在“单元格”窗口中的Folgen中。
添加: 将选定的程序插入CELL.SRC。仅在“现有程序”窗口中可用。
删除: 从CELL.SRC中删除选定的程序。仅在“程序”窗口中可用。
配置自动外部输入/输出:
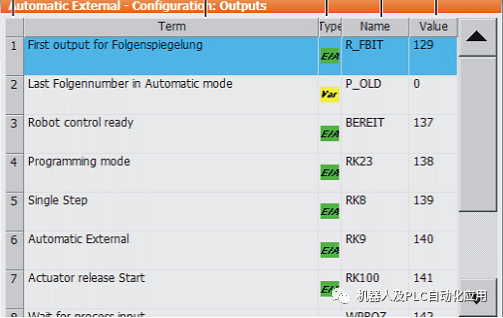
1.在主菜单中,选择配置>输入/输出>自动外部。
2.在“值”列中,选择要编辑的单元格,然后按“编辑”。
3.输入所需的值,然后按OK保存。
4.对所有要编辑的值重复步骤2和3。
5.关闭窗口。更改已保存。

配置外部自动输入
配置自动外部输出
自动外部输入:
ANTEIN
如果在此输入上设置了高电平脉冲,则上级控制器将打开机器人驱动器。输入必须永久存在才能启用操作。如果设置为低,上级控制器将关闭机器人驱动器。
SRB
如果在此输入上有一个持续时间至少为20 ms的高电平脉冲,则上级控制器将启动所选程序。
P_TYPE
审核编辑:刘清
-
KUKA机器人首次投入运行的整个步骤2023-05-29 6388
-
KUKA机器人外部自动控制配置步骤2023-03-17 14120
-
KUKA机器人C4外部自动控制最终版-v1介绍2023-01-08 2984
-
KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析2022-11-29 2365
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 1674
-
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错2022-03-17 9107
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1461
-
KUKA机器人伺服驱动模块维修2021-09-17 1745
-
库卡机器人MGV电源模块维修2021-09-08 1714
-
KUKA机器人C4外部自动模式的配置解析2020-10-09 4903
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12117
-
KR C4机器人和LBR iiwa机器人的不同之处2019-07-08 2445
-
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载2019-04-22 5275
-
KUKA重型机器人2015-02-03 8121
全部0条评论

快来发表一下你的评论吧 !
