

KUAK 机器人更换手轴的安装步骤
机器人
描述
拆卸机器人手轴4-5-6
卸下机器人的工具.
记录好卸下工具之前的个轴的位置
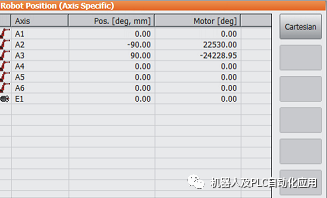
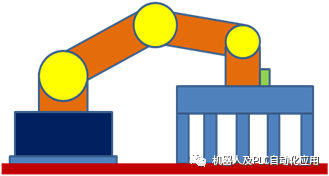
将机器人位置摆好.
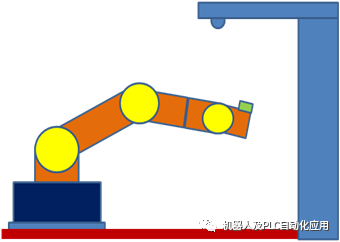
钓住机器人手轴,机器人关机
专用工具

操作步骤
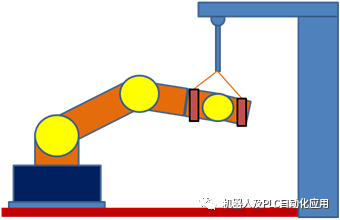
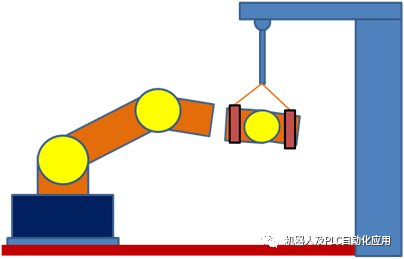
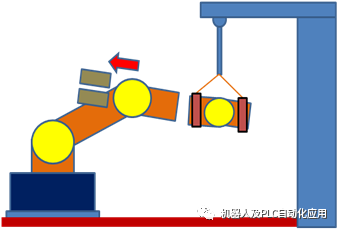
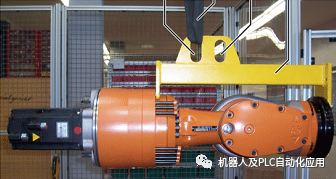
1. 用合适的设备固定主机械手:
起重机
挂装设备 (滑轮)
主机械手起重装置
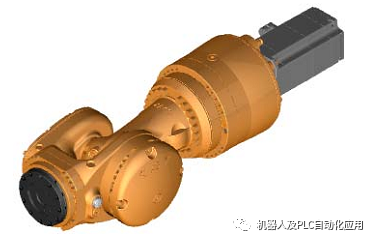
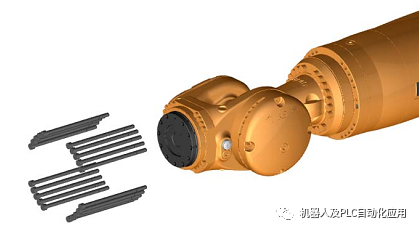
2. 松开用于固定手部的内六角头螺栓 M10 x 170 / 10.9。
Quantec 主机械手:
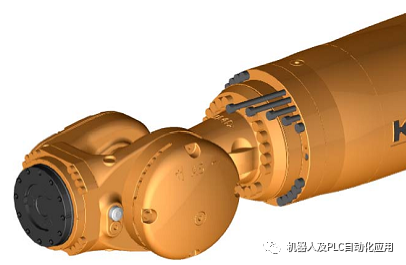
位于孔圈最上方的那颗螺栓应在最后旋出。由此可避免松开时歪斜。
3. 旋出手部固定螺栓。
Quantec 主机械手固定螺栓
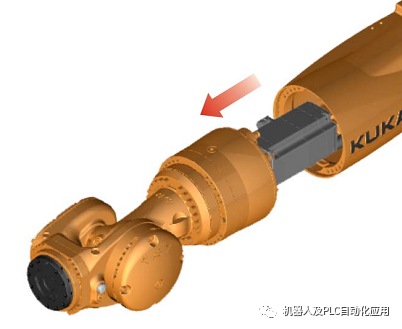
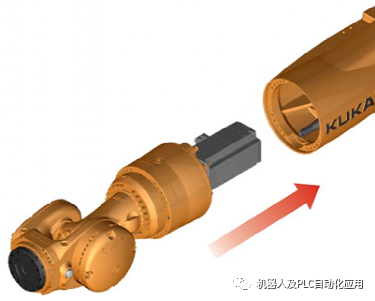
4. 将手部沿箭头方向水平拉出约 20 cm
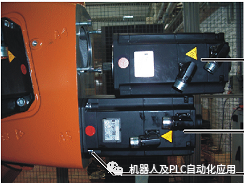
5. 松开电机 A6 上的电机插头和传感器插头。
6. 将手完全从小臂中拔出。
7. 放在一块合适的垫子上。
8. 松开轴 4 和轴 5 电机上的电机插头和传感器插头。
9. 松开轴 4 和轴 5 手轴电机的螺栓。
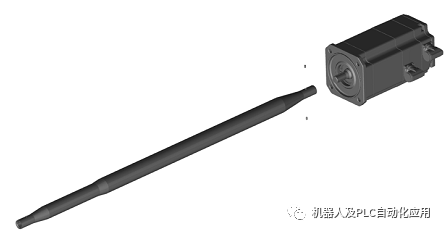
10. 松开无头螺丝,拆下驱动轴 A5 和 A6。

驱动轴 A5 和 A6
安装手部和手轴电机
操作步骤
1. 给轴连接件和配合面涂上少许 Microlube GL261。
2. 将轴 6 电机装到主机械手上并用四个内六角螺栓 M8 x 25 / 8.8 以 23 Nm 的拧紧扭矩上紧。
3. 用合适的设备提起主机械手。
4. 在水平位置 — 吊在小臂前约 20 cm — 连接轴 6 的电机插头和传感器插头。

连接轴 6 电机

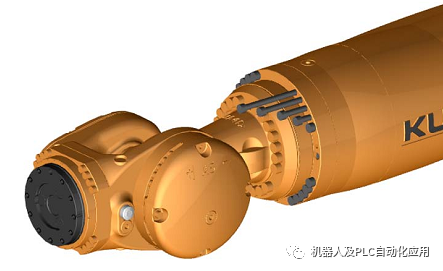
5. 小心地沿箭头方向将主机械手推入小臂,插入时要注意定位用的配合销和轴 6 的布线。
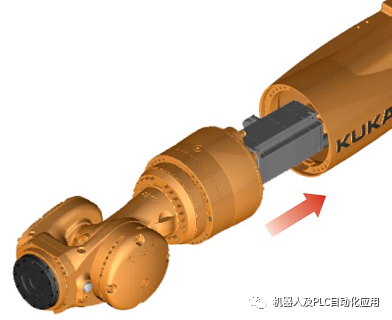
安装主机械手
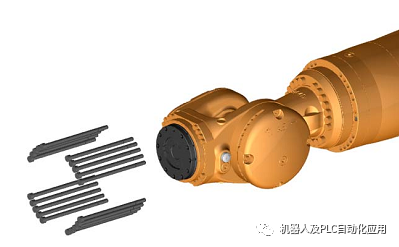
6. 旋入 20 个内六角螺栓 M10 x 170 / 10.9。
7. 用 60 Nm 的扭矩交叉拧紧。
9. 将连接轴装到轴 4 和轴 5 的电机上 (轴向固定),事先给轴连接件涂上少许 Microlube GL261,给紧定螺钉 M4 x 8 / 45H(拧紧扭矩 3.7 Nm)涂上少许三键粘胶 Drei Bond 1305。
10. 将轴 4 和轴 5 的电机 (用连接轴)装到小臂上并用 8 个内六角螺栓 M8 x 25 / 8.8 以 23 Nm 的拧紧扭矩上紧。
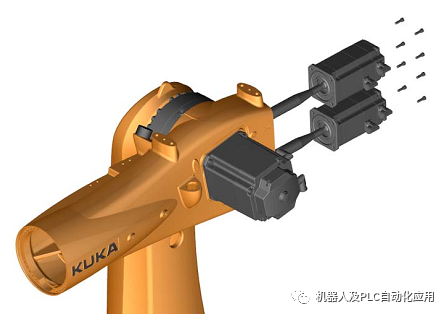
轴 4 和轴 5 的驱动轴
11. 连接轴 4 和轴 5 的电机插头和传感器插头。

轴 4 和轴 5 电机的连接电缆
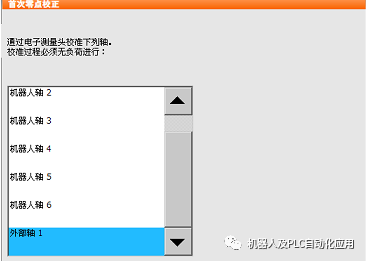
更换完手轴后要记得作零点标定哦

然后再按照记录好的轴的位置去带工具,这样能确保6轴方向的工具安装正确.
编辑:黄飞
- 相关推荐
- 热点推荐
- �
-
六轴工业机器人的主要特点2017-08-08 6654
-
单轴与多轴机器人的优缺点PK(深度总结)2017-11-23 3676
-
六轴智能搬运机器人的优劣势分别是什么2018-08-14 1714
-
多轴机器人的发展趋势2020-07-29 7466
-
ABB机器人维修保养指南2020-08-19 5970
-
工业机器人仿真与编程2021-09-07 2391
-
大族机器人-六轴机器人2016-12-25 1607
-
六轴机器人如何选购?六轴机器人的选购技巧2019-03-21 1520
-
工业机器人安装调试的13个步骤2021-01-29 12686
-
简述工业机器人安装调试的13个步骤2021-04-05 8469
-
四轴机器人与六轴机器人的区别2021-08-26 15644
-
ABB工业机器人安装系统添加外轴步骤(适用IRC5系统)2022-08-26 4201
-
KUAK机器人更换手轴的几个关键点2023-02-16 1714
-
工业机器人的安装及调试步骤2023-06-08 8291
-
单轴机器人的安装方法2023-02-18 3339
全部0条评论

快来发表一下你的评论吧 !
