

探讨AUTOSAR中信号通信的高级机制和术语
电子说
描述
1 系列目标
本系列文章的目的是解释 AUTOSAR 系列中基于信号的通信的基本概念,但不深入 AUTOSAR 本身。当我为一家 2 级汽车供应商从事基于信号的通信项目时,我意识到我对 AUTOSAR 的了解并不能帮助我顺利开始该项目。相反,自始至终,这是一段艰难的旅程,我通过翻阅来自组织内部和外部的大量文件来了解车辆通信的细节。
大多数时候,我分散了必须处理的信息片段,却不知道它与另一条信息之间的关系,以及当信息穿过 AUTOSAR 软件组件的各个层时它如何影响其他东西。通过系列文章,我试图带来与车辆基于信号的通信概念相关的非常底层的信息。
本系列文章的目标受众是汽车软件开发人员,他们必须在经典 AUTOSAR 框架内处理车辆通信,并且需要对需要解析信号数据并进行通信的软件组件进行建模或使用,以将其称为应用软件。祝读者阅读愉快。
2 简介
AUTOSAR(汽车开放系统架构)是领先的汽车制造商和供应商的一项标准化计划,成立于 2003 年秋季。目标是开发 ECU 软件的参考架构,以管理现代车辆中日益复杂的 ECU。
AUTOSAR 体系结构的基本元素包括正式定义的软件组件 (SWC),具有与基本软件 (BSW) 的明确指定接口,进而提供基本的标准服务,例如总线通信、内存管理、IO 访问、系统和诊断服务。
另一个基本元素是将 SWC 与 BSW 连接起来的运行时环境 RTE。人们可能遇到的最高级别的分层架构图如下图所示。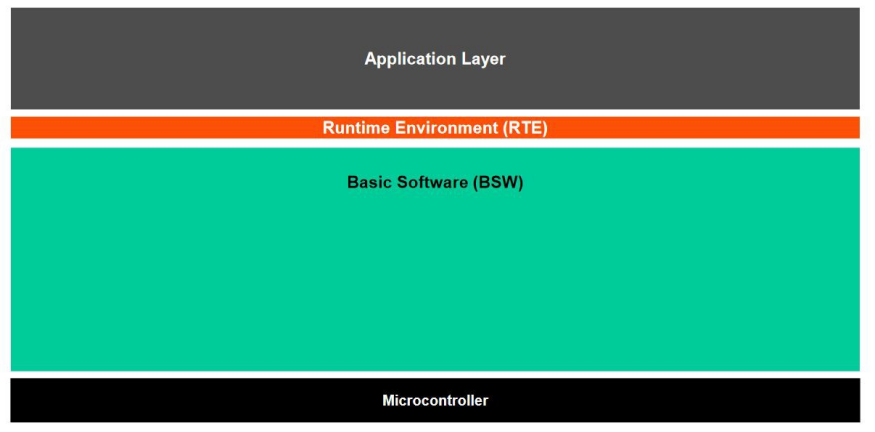
AUTOSAR 架构中的重要层。
通过这样的标准,汽车软件社区的开发人员在应用层上竞争,同时标准化硬件及其接口,从而消除开发硬件(例如 ECU)和后来可以运行的应用软件的巨大成本在新硬件之上。
从车主的角度来看,他可以选择从他选择的供应商处更换ECU,而不限于车辆公司指定的供应商。
绿色的 BSW 层进一步细分为 4 个重要的分层组件,即服务层、ECU 抽象层 (ECUAL)、微控制器抽象层 (MCAL) 和复杂驱动层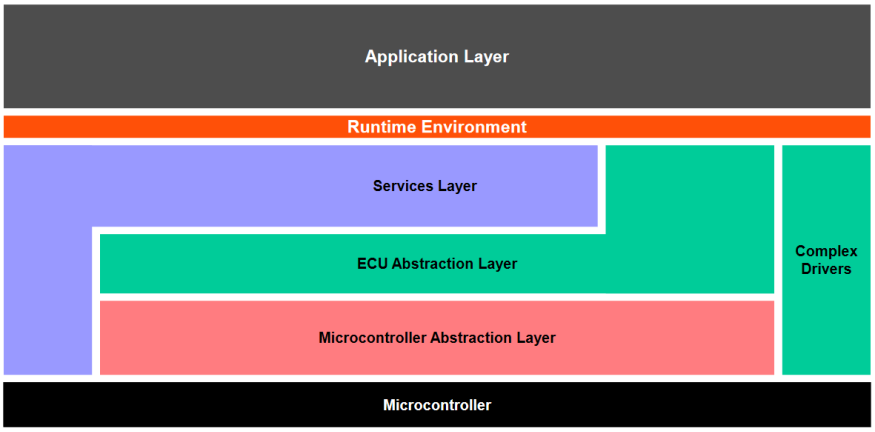
BSW 中的层。
BSW 中的每一层还包含标准化的软件组件,这些组件为车辆的安全运行提供关键功能。此类组件从最顶层开始直接或通过其下层提供的通道与硬件交互。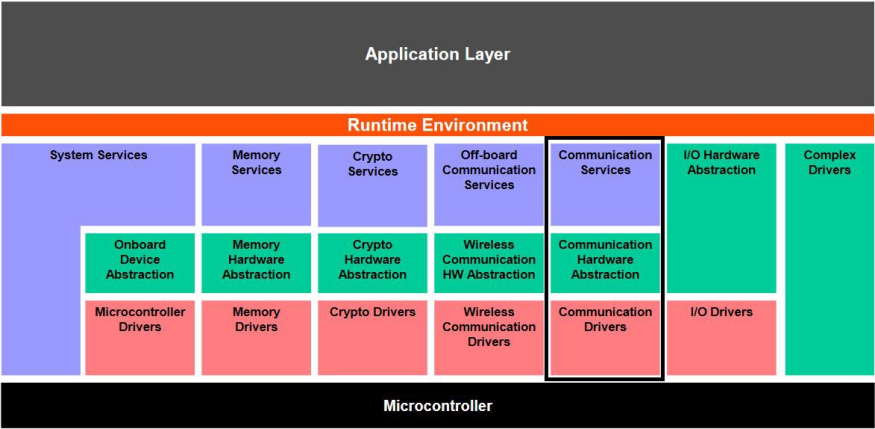
BSW 中的组件。
3 BSW 内部的通信架构
我这篇文章的重点是AUTOSAR中基于信号的通信,其BSW层的相关组件在上图中的黑框中突出显示。可以在下图中看到对这一层的仔细观察。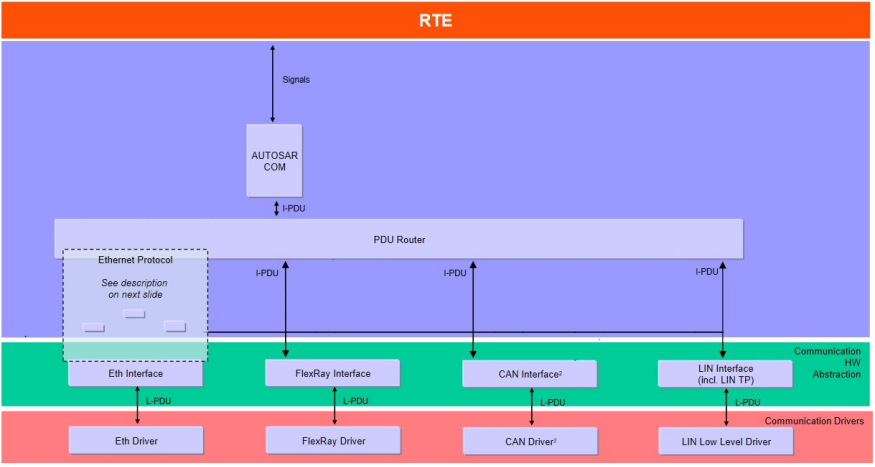
AUTOSAR 中的通信层。
因此,从通信的角度来看,与 AUTOSAR 中的几种通信机制(或汽车术语中的总线系统)相关的驱动程序和接口,即以太网、FlexRay、CAN 和 LIN 可以在上图中看到。
所有这些都将数据(此处的信号)传递到称为 PDU 路由器的基本软件组件,然后信号再次通过 AUTOSAR COM 传递到 RTE,从 RTE 将信号发送到应用层内的相关应用软件。
4 汽车中的总线系统
在不深入了解车辆通信协议在过去几十年中如何演变的历史细节的情况下,我想重点介绍广泛用于车辆通信并受 AUTOSAR 标准支持的重要总线系统。
1.CAN或控制器局域网: 这个繁忙的系统由 Robert Bosch GmbH 在八十年代初开发,并于 1994 年成为国际标准化 (ISO 11898)。CAN 总线系统支持高达 1 Mbit/s 的数据速率。
2.CAN FD或控制器局域网灵活数据速率: 这是 CAN 总线系统的进一步发展。它支持更高的数据速率(最大 8 Mbit/s)和多达 64 个数据字节。
3.LIN或本地互连网络: 专为汽车中智能传感器和执行器的经济高效通信而开发。LIN 总线系统特性:主/从架构(单主和多达 16 个从属)、保证延迟时间、数据帧的可变长度、配置灵活性等等。
4.FlexRay: 该总线系统被设计为用于所有与安全相关的应用程序以及在汽车中传输大量数据的总线系统。FlexRay 总线系统特性包括高达 10 Mbit/s 的数据传输、所有网络的冗余实现、确定性传输行为。
5.以太网:这是我们都知道的术语,并且已经过时了,由于其架构的固有性质,它很容易适应车辆通信的需求。对于汽车应用,使用以太网的特定标准 IEEE802.3。它们的优势在于它们的大带宽、网络的可扩展性以及使用经过验证的通信协议。
5 AUTOSAR中对通信概念的需求
AUTOSAR 中对通信概念的需求源于这样一个事实,即现代车辆依靠软件来感知其内部和外部环境并采取/计划可能是先发制人的纠正措施或可能是驾驶员计划的行动过程或车辆本身。
由于我们正处于自动驾驶汽车的风口浪尖,而且汽车中的软件都是针对自动驾驶功能的,所以我会坚持汽车可以在一定程度上控制自己的想法。 在任何情况下,车辆从传感器收集的数据都必须在某处进行处理,以便车辆可以决定需要采取什么行动才能安全运行并同时达到目标,例如从 A 点到 B 点。
在这一点上,我喜欢将自动驾驶汽车与人体进行类比: 车辆通信基础设施与人类神经系统的类比
1. 人体具有眼睛、鼻子、皮肤、触觉和耳朵等形式的传感器,用于感知外部环境,并将数据发送到中央单元,即我们的大脑,稍后可以采取行动向我们的身体部位发送信号的形式,例如手和腿向某个方向移动。同样,车辆具有雷达、激光雷达、摄像头等传感器,它们可以感知外部环境,将信号发送到可以处理这些数据的 ECU。
2. 大脑还通过向身体的各个部位发送信号来控制身体内部功能,例如消化食物、泵血、从血液中提取二氧化碳和许多其他功能,使我们能够过上健康的生活,我们'不知道在我们的日常生活中。但是大脑能够完成这些任务,因为它具有神经系统形式的通信基础设施。
同样,车辆还需要执行数百个基本功能以持续监控其内部环境,例如电池功耗、温度以保持传感器和 ECU 的安全运行水平等等,并且必须根据数据做出有凝聚力的决策保持车辆健康用于故障安全操作(自动驾驶汽车行业的流行词)。为了实现这种连贯的功能,将所有传感器信息传送到中央单元或将信息分发到不同的单元,车辆需要一个通信基础设施,可以认为传感器通过电缆和电线连接到一个或多个处理 ECU。
为了标准化通信基础设施的接口,需要一个通信概念,而 AUTOSAR 已经成功地提出了一个。
6 通信在车辆中的工作原理
在非常普遍的意义上,车辆传感器检测到这些变化。传感器在此过程中产生的数据是信号形式的原始数据。正是这个信号首先被转换为适合通过传感器内的较小 ECU 通过通信基础设施传输的信号。然后该信号通过电缆和电线发送,也称为物理通道, 分配给处理它的ECU。在 AUTOSAR 术语中,它通常称为通信总线。ECU 在其硬件层中接收原始信号数据,并在 MCAL、HWAL、服务层中进行处理,最后转发到 AUTOSAR 运行时环境 (AUTOSAR RTE),然后再将其发送到运行基于传感器数据输入的决策算法。如下图所示。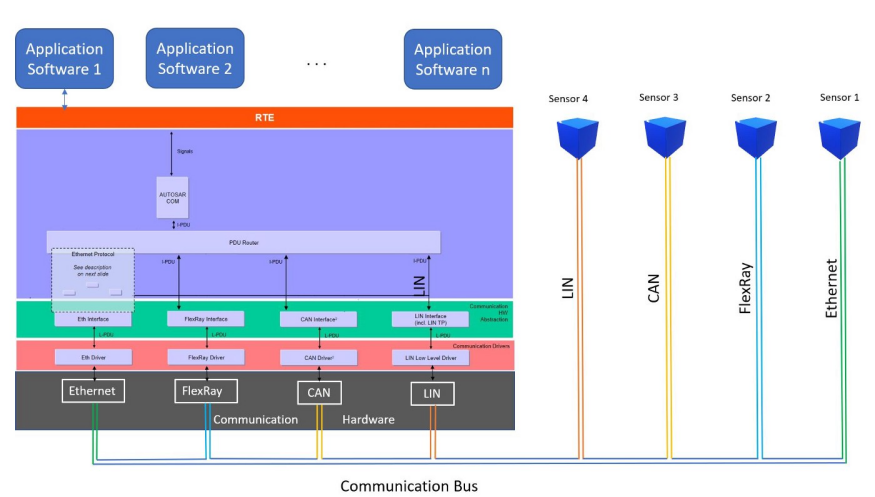
AUTOSAR 中通信基础设施的总体示意图
在上图中,已说明了一般草图。实际上,车辆可能不支持所有通信系统和协议。但是应该带走的信息是,通信发生在特定通道上,该通道旨在支持特定系统(LIN、CAN、FlexRay 或以太网)。
7 通信基础设施
在第 5 节中,我介绍了通信基础设施这一术语,它包含所有元素,包括高级和低级,可用于和定制以实现与依赖于车辆通信的通信和车辆服务相关的所需车辆功能。
在 AUTOSAR 中,通信基础设施可以再次分解为高级元素,例如通信拓扑,这只是意味着通信点的布局(请参阅本文以了解网络拓扑的概述)和由 AUTOSAR 元素组成的通信控制,即通信集群,物理通道和控制通过车辆通信网络的数据流的ECU 。
8 结论
在本文中,我深入探讨了 AUTOSAR 中信号通信的高级机制和术语,并解释了这些高级元素是如何组合在一起的。
审核编辑:刘清
-
AUTOSAR通信协议解析 如何实现AUTOSAR通信2024-12-17 4939
-
CP AUTOSAR信息安全机制全面解析2024-02-22 6597
-
AUTOSAR架构下的多核通信介绍2023-11-13 5571
-
AUTOSAR经典平台介绍2023-10-27 2798
-
AUTOSAR功能安全机制之内存分区与实现2022-09-19 2961
-
介绍AUTOSAR支持的四种功能安全机制2022-06-10 5784
-
经纬恒润正式升级为AUTOSAR高级合作伙伴2022-03-25 1757
-
VHDL设计中信号与变量问题的研究2010-04-12 1576
-
低压电力线载波通信中信号传输特性分析2009-08-06 971
全部0条评论

快来发表一下你的评论吧 !
