

无人机在输电线路巡检中发挥着越来越大的作用
电子说
描述
针对目前巡线方法存在的效率低、成本高以及直升机电力巡检技术烦琐和可操作性不强等问题,对无人机系统进行了详细的阐述,同时结合无人机在线路运维管理中的应用,详细介绍了无人机巡检的流程,并重点围绕输电线路巡检中路径规划、线路故障的探测及线路的评估预测进行探讨,分析得出以下结论:无人机巡检可有效提高输电线路巡视与检修效率,推动输电线路智慧运维的进程。
社会经济的快速发展离不开电网规模的迅速扩大。大规模复杂的输电线路需要更多的人力、物力进行巡检,由于分布存在差异,输电线路的缺陷隐患也各不相同。传统的以人工为主的输电线路巡检方法存在巡检精度低、盲区多、运维范围小等缺点,不能满足线路巡检的要求,传统巡检方法存在的这些不足促进了无人机巡检技术的发展。
1 输电线路巡检现状
目前输电线路的巡检方法主要有人工巡检、机器人巡检、直升机巡检和无人机巡检。其中,人工巡检只适合小规模、小范围的输电线路巡检,针对大面积、大范围、复杂的山区和水域等输电线路的巡检,人工巡检需要花费大量人力、物力,且存在巡检盲区。直升机巡检效率高,但是需要投入大量的资金,同时直升机技术比较复杂,推广使用比较困难。机器人巡检距离比较短,效率低,而且只限于杆塔之间。而无人机由于飞机体积小、成本低、使用方便,技术比较简单成熟,在电力巡检中逐渐被认可,其能够克服直升机、机器人以及人工巡检的缺点,因而在输电线路运维工作中扮演的角色日益重要起来。
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机可以搭载各种监测设备,如红外、激光雷达、图像采集设备等。通过无人机,运维人员可以方便地借助监测设备进行人工无法实现的、危险的以及重复性的输电线路运维工作。
2 无人机输电线路巡检
无人机输电线路的巡检通常情况下是无人机搭载相机、激光雷达、红外设备等工具对输电线路进行巡检、数据采集。采集的原始数据通过通信设备传输至地面终端的工作站,内业数据处理人员利用专业的软件打开采集的数据,并对数据进行处理,分析得到输电线路中存在的缺陷隐患,然后根据制订的运维检修策略,安排运维人员进行排查消缺。
无人机的巡检可以通过图像数据、点云数据、文本数据等对输电线路的断股、鸟窝、温度异常、绝缘子掉串、金具锈蚀、树障等进行监测分析。
2.1 无人机巡检系统
无人机系统包含飞行平台、机载设备、通信设备、地面站。其中,飞行平台自身可搭载许多先进的数据获取仪器,还有自助预警设备和相关的辅助设备,其作用为保持飞行平台在空中稳定飞行。机载设备作为巡检工具搭载在飞行平台上,机载设备的参数根据实际需要设置。通信设备可将采集的数据传输至数据处理中心。地面站的主要作用是运维人员可以无线操控无人机,并提供位置信息[1]。
2.2 无人机巡检过程
输电线路的巡检包括多项工作,为使输电线路的巡检更加规范,同时提高巡检效率,需要在巡检前根据规范、实际项目的需要、现场实际情况等制订巡检流程。无人机巡检作业流程如图1所示。
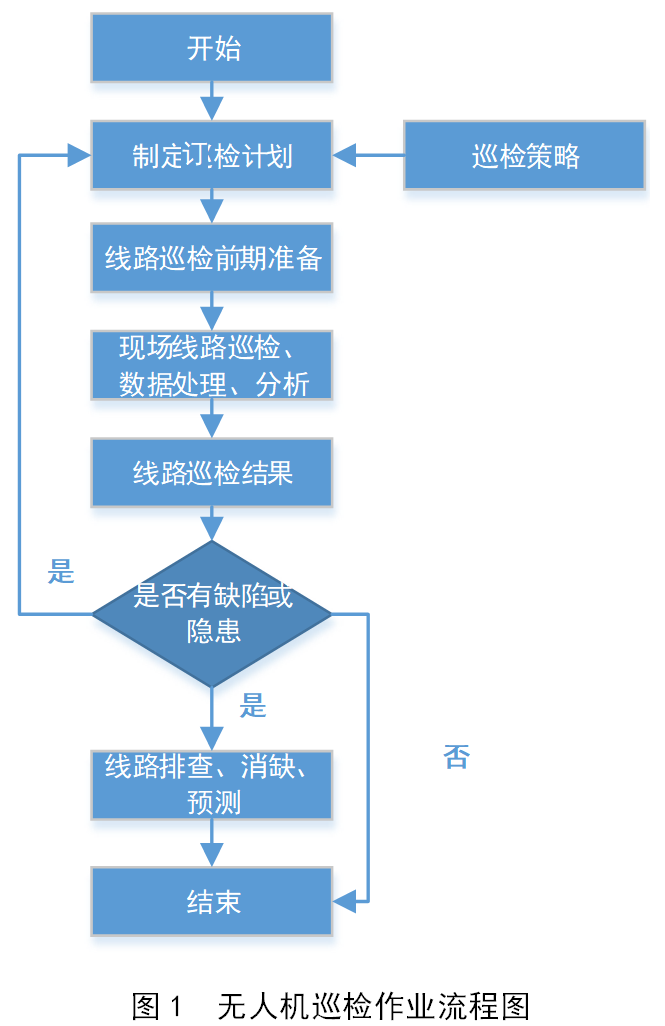
(1)巡检策略。输电线路的运维管理单位根据管辖区域内输电线路上一年的巡检结果及上级单位的任务安排,综合制订符合单位需求的运检策略,并细化到每季度的巡检策略。
(2)制订巡检计划。根据运维策略并结合线路巡检的情况(缺陷、隐患),制订合理的巡检计划。
(3)巡检前期准备。根据之前人工巡检踏勘的线路地形地貌和周围的环境,准备线路、杆塔的台账信息,以备后续使用。
(4)现场线路巡检,数据处理、分析。现场线路巡检主要包括无人机飞行前的准备和线路巡检。无人机飞行前需要对无人机进行检查、试飞,包括确定飞行路线;线路巡检是无人机搭载机载设备按照设定的飞行路线对线路重要部位进行数据采集。数据处理、分析主要是对采集的数据进行存储、预处理、分析。
(5)线路巡检结果。根据数据分析结果,总结巡检的结果,以备线路状态评估使用。
(6)线路排查、消缺。根据线路巡检结果,对出现缺陷或隐患的线路重要部位进行现场排查,并进行消缺处理,对于存在隐患的部分进行线路的状态评价。
2.3 巡检路径规划
在使用无人机巡检时,最为重要的是输电线路的巡检路径要明确。传统的巡检路径规划方法是人工采集线路的重要点位,然后将重要点位导入无人机的导航系统中,这种方法需要严谨的计算,否则会出现无人机飞行安全问题[2]。
为方便运维人员更加有效地规划线路巡检路径,可使用遗传算法进行路径规划。输电线路巡检路径主要包含巡检线路的起点、终点、拐点以及线路中重要目标点的坐标信息,同时路径规划也与无人机自身的参数以及实际巡检任务的要求有关,如无人机电池容量、最低巡检高程、最大拐角等。路径规划的最优选择是在满足巡检要求的前提下找到符合约束条件的线路,同时消耗较少的人力、物力[3]。
在实际巡检中,惩罚函数的表达式如下:

式中:a、b、c、z为常数;xi表示不同的约束条件。 实际的运维巡检中,可以根据两个相邻的路径节点,计算整个线路节点总的路径长度,假设一条线路有n+1个目标点,目标函数可以表示为:

式中:mi表示第i段线路的长度;h表示惩罚函数。 根据式(1)(2),路径规划的函数可以表示为:

这种规划方法是根据适应度函数的最小解得到最佳巡检路径,约束条件的选择及常数需要根据实际巡检任务具体分析。
2.4 线路故障的探测
输电线路故障的探测根据故障的类型主要分为3个方面:
(1)根据无人机搭载的摄像头对线路周围进行拍照,运维人员根据照片判断分析故障类型及故障的严重程度。人工逐个进行分辨存在效率低、人为干扰过多等缺点,因此需采用智能深度学习的方法对输电线路图片进行批量识别,目前广泛使用深度学习方法识别故障,对故障进行分类。使用较为广泛的主要是基于RetinaNet模型的深度学习方法,此方法选取以分类损失函数为核心特征的金字塔网络为骨干网络用于图像目标的自动检测。相比传统的一阶目标检测和二阶目标检测模型,此方法在精度和准确度上都较高[4]。
(2)无人机搭载红外线和紫外线监测设备,利用红外线独有的优势监测输电线路的温度异常,确定线路的故障点位置;利用紫外线监测输电线路放电后产生的信号,以此检测线路放电缺陷点故障。
(3)无人机搭载激光雷达设备对输电线路进行数据采集,根据测区已有的控制点进行数据计算,求得点云数据的坐标点位置。对点云数据进行预处理,进行点云数据分类,形成彩色点云,分类分别为高植被、低植被、电力线、杆塔、地面等多类。根据已有的点云数据量测树木、建筑物至输电线路的距离,并依据电网树障判断标准分类出输电线路的危险点。同时,可以根据点云数据模拟出大风、高温、覆冰情况下的输电线路,为树障砍伐、输电线路改造提供依据,从而为电力线路的检修运维和建设工作提供方便[5]。
2.5 输电线路的评估预测
根据巡检数据分析结果,线路的隐患目标点会对输电线路的运行状态造成安全风险,因此需要对巡检后的线路做风险评估预测。输电线路风险评估,主要涉及设备的健康度、交叉跨越类型、微气象因子等。设备健康度直接引用设备状态评价结果(巡检数据的分析),分为正常、注意、异常和严重4种状态;微气象因子包括气温、降水量、风速、相对湿度、大气压强等。建立风险评估模型,技术路线如图2所示。
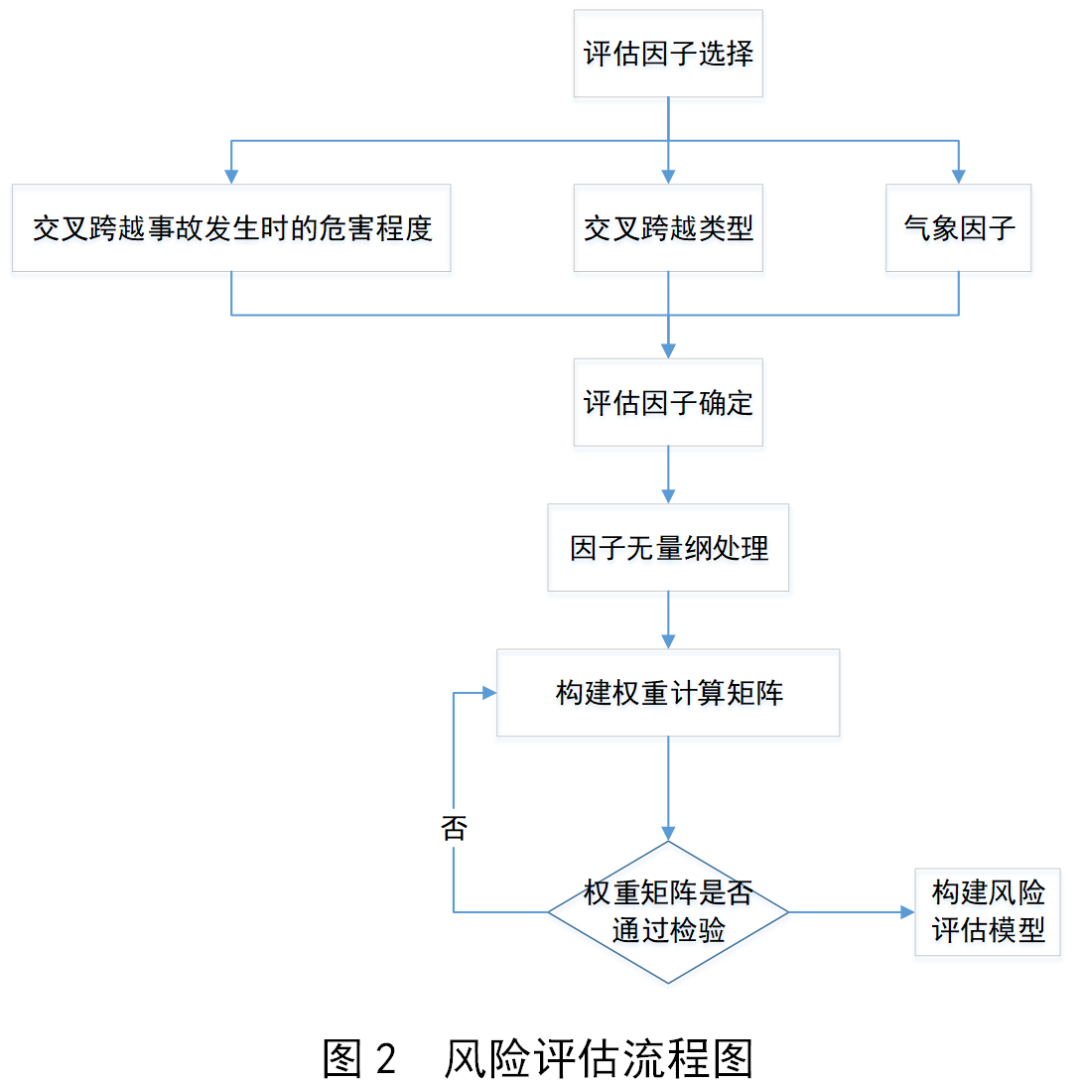
根据设备健康度和交叉跨越重要性,确定风险评估管控级别——Ⅰ级、Ⅱ级、Ⅲ级、Ⅳ级,根据不同的管控级别制订不同的管控措施,可以有力保障输电线路安全稳定运行。缺陷隐患整治应做到及时发现、准确定级、立即消缺、闭环管控,原则上,应在规定时限内完成整治处理,或采取必要的措施将隐患影响尽可能降至最低。
4 结语
无人机因其轻量便捷、成本低的优势,在输电线路巡检中发挥着越来越大的作用,有着广阔的发展前景。无人机搭载机载设备进行巡检很大程度上节约了人力、物力,同时可以应用于人工无法进行巡检的线路以及危险线路,避免了线路巡检的盲点,为线路的运维管理提供了强有力的辅助工具,推动了输电线路运维的智能化进程。无人机搭载设备监测的多源海量数据为输电线路的智能分析提供了数据支撑,促进了深度学习、人工智能方法在输电线路运维中的应用。
审核编辑:刘清
-
供应 智能电网输电线路在线监测系统2015-08-18 2748
-
基于lora的输电线路状态监测2016-09-29 5709
-
如何降低电力巡检的维护成本2019-11-21 1335
-
无人机飞控系统2021-07-21 2819
-
无人机图像的输电线路断股与异物检测2018-01-05 1101
-
喷火无人机清除导线异物,为输电线路的安全保驾护航2018-05-04 7053
-
如何使用摄像头的输电线无人机进行自主巡线的设计方案资料说明2019-03-04 2779
-
俄罗斯采用无人机进行输电线路自动监测2019-04-24 4030
-
无人机对电线路绝缘的识别现在的成熟了吗2019-10-05 698
-
冀北地区首次220千伏输电线路实现无人机自主机巡2019-12-07 1238
-
无人机机载激光雷达巡检线路 全面提升输电线路运维水平2019-12-09 2228
-
如何利用无人机进行日常输电线路的机巡作业2020-07-16 2567
-
无人机巡检及数在输电线路中的应用2020-08-26 1678
-
一种安全智能无人机库房高效全面实现2020-10-10 2539
-
经纬M300 RTK无人机在高空巡检输电线路中的应用2020-10-22 3019
全部0条评论

快来发表一下你的评论吧 !
