

汽车ADAS进化的百年历史
电子说
描述
01 嗜睡监测系统和驾驶员监控
第一个嗜睡监测系统与许多ADAS一样,也是机械性质的——安装在车道之间和路边的隆起带。虽然不完美,但它是第一个显著减少因疲劳驾驶发生车祸的系统(根据美国国家高速公路交通安全管理局NHTSA在1998年的统计数据)。
NHTSA在1998年发表的一份报告全面介绍了关于疲劳驾驶的报道。该报告记录了实验室和车内打瞌睡的测量工具——在当时,通过测量生理信号来检测打瞌睡是很常见的。但这只适用于实验室环境,因为还必须研究每个人的情况并个别校准数据。不过,该报告提到正在研究车载系统,如闭眼监控、转向传感器和车道跟踪装置(NHTSA,1998)。由于技术上的限制,这些设备在当时没有商业化(Dinges, 1995)。
也许第一个著名的电子瞌睡检测器是转向角传感器。第一个商业化的系统出现在21世纪初。一个方向盘传感器追踪方向盘转动的距离和速度。就其本身而言,这一信息并无帮助。但如果把这些数据结合速度、稳定控制(偏航和颠簸)、甚至摄像头信息,并与一个软件算法相结合,就可构建一个可靠的瞌睡估计系统。
通常情况下,这些系统只在高速公路上工作,并且只测量微转向,因为在城市里走走停停,有很多转弯,会使算法混乱。这些系统用每次出行的初始阶段来校准驾驶员,作为一个基线。博世被许多人认为是该领域的先锋——关于其方案的更多详情,请看他们的产品页面。该方案运作很好,但现代汽车正变得越来越自主,在这种情况下,驾驶员可能完全无需驾驶。如果汽车处于控制状态,监控自己是没有意义的。
一个新的方案出现了,它可在两种情况下工作,无论是人类驾驶员还是自动驾驶系统,都可解决这个问题。这方案被称为驾驶员监控系统(DMS)。人们在90年代末就开始探索DMS,但直到2020年代才准备好投入生产。DMS使用计算机视觉、摄像头和处理程序,寻找面部和眼睛的线索,以确保驾驶员的注意力和参与度。听起来很简单,但要可靠地实施这些算法却很复杂。EE Times article的这篇文章通过对DMS的迷思,详细介绍了这些挑战(Barnden, 2021)。
欧洲新车评估组织(NCAP)现在强制要求使用这些DMS系统;到2024年所有新车都必须有DMS系统,以获得最高的碰撞和安全评级。有相当多不同的专有方案,从低端到高端都有。但对汽车制造商不利的是,这个市场对成本高度敏感,客户不愿意为这个功能支付额外的费用。
另一个趋势是将驾驶员监控扩展到包括所有乘客,这种类型的监控被称为乘员监控系统(OMS)。汽车制造商对这一方案更兴奋,因为他们可将其作为舒适和便利功能来赚钱。驾驶员可使用手势和面部识别来自定义车辆设置。在互联网联接的汽车中,视频通话或社交媒体应用程序可应用OMS。安全功能可使用OMS,如检测儿童是否被留在车内无人看管,或自动关闭空座安全气囊或低于安全重量的人占用座位的安全气囊。安全应用可使用OMS进行车内视频记录。
传统的DMS和OMS的硬件和光学器件是不同的。DMS通常使用带有全局快门的近红外成像,而OMS通常使用带有可见光的卷帘快门。大多数汽车制造商希望将DMS和OMS合并为DOMS(驾驶员和乘员监测系统),以降低成本,做出一个更小尺寸的方案。
安森美(onsemi)的高性能图像传感器正在实施一种新颖的系统方案,一个卷帘快门图像传感器可同时用于DMS和OMS应用,为DOMS提供了理想的、极具性价比的方案。
一个挑战是,DMS通常安装在转向轴或仪表盘上,而OMS最好安装在后视镜上方或车门立柱上。尽管设计更复杂了,但越来越多的设计将两者结合起来以节省成本。许多汽车制造商现在安装了包含DOMS整体方案的顶置控制台,而安装在后视镜中也很常见。
02 环视和车镜替代
环视摄像机是安装在车辆外部的可见光摄像机,以增加在倒车或停车时的驾驶能见度。通常有四个摄像头:一个在前面,一个在后面,还有两个侧面的摄像头。这些摄像头都是广角镜头,形成一个鱼眼类型的图像。图像处理和先进的算法将这四幅图像和汽车的照片合并。由此产生的鸟瞰图显示在仪表板显示器的屏幕上,并模拟车辆上方的摄像头,让周围的情况直观地呈现在驾驶员眼前。有时这些系统也被称为全向视角(Omni view)或360°视角。
第一辆拥有环视系统的汽车是2007 Infiniti EX35,由英菲尼迪和日产共同开发。最初的系统只提供这种鸟瞰图,但较新的系统提供多种视角,特别是在更高端的车辆上。
当与汽车周围的超声波传感器相结合时,环视系统有效地避免了碰撞,适合狭小的停车空间。超声波传感器还有助于提醒驾驶员注意行人或移动物体。
一些更先进的系统还可看到车辆的引擎盖,甚至在拖车时看到拖车的后面——有时被称为X光。
侧摄像头除了用于停车,还可以取代传统的侧后视镜在驾驶过程中使用。由于摄像头可以做得非常小,后视镜的尺寸也可以减少,这使得车辆更符合空气动力学,节省高达4%的燃油里程或增加电动车的续航能力。
虽然更换后视镜在技术上可行,但许多驾驶员不喜欢这样做,因为他们习惯于用真正的侧后视镜开车。另一个障碍是,一些国家要求将侧后视镜作为备份,这就否定了拆除后视镜所提供的好处(但不是用于停车)。因此,摄像头取代车镜比环视系统慢(Howard,2014)。
03 软件定义的汽车
软件定义的汽车这一术语已成为描述汽车设计中巨大变化的词。大量的研发已涌入到对自动驾驶汽车的追逐,特别是在过去十年。支持自动驾驶的所有传感器所需的计算量,使得车辆系统和传感器的控制和使用方式发生必然的重大变化。
更传统的方法是在包含本地处理器和软件的模块之间有一个中央CAN或LIN网络架构,这在2015年之前是很普遍的。但随着车辆及其系统变得更加复杂,需要更集中的计算,出于需要,域控制器变得更普遍。
例如,要结合所有各种传感器输入,处理数据,并向多个安全系统发送指令以实现ADAS功能,需要一个ADAS控制器。数据速率也在增加,需要更高速的数据传输协议。最终,由于自动驾驶和先进系统所需的极大处理量,将出现集中式计算(Morris,2021)。
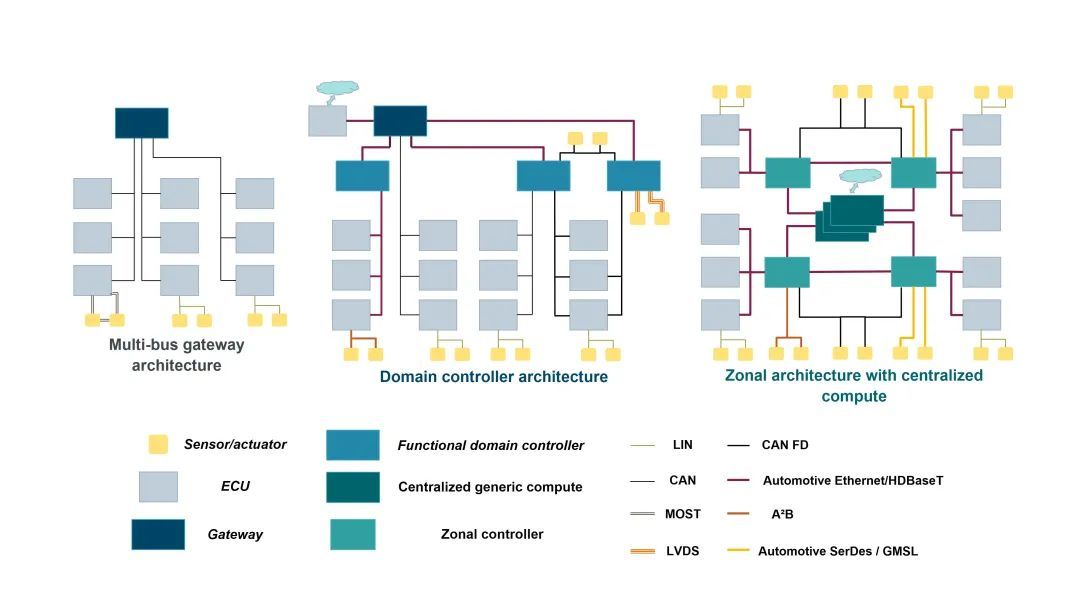
图3. 车辆架构如何演进 – 左边是原始系统;中间是带有域控制器的现代风格;右边是集中式计算(图片来源:EE Times和Siemens Digital)
就像手机的发展一样,消费者要求通过软件更新获得更多的数字功能和更长期的价值。汽车制造商对这种模式也非常感兴趣,因为他们必须通过空中软件更新进行灵活快速开发,以实现新的功能和漏洞补丁。在开发新功能的同时,他们还可以通过服务和订阅创造新的收入来源。
就在此时,整个汽车行业正在经历这种演变,在各tier和OEM之间探索新的商业模式找元器件现货上唯样商城。一些汽车公司正在以软件公司而不是汽车公司的身份进行备案。当然,特斯拉是以科技公司起家的,早在2003年就成立了,2008年开始生产第一辆Roadster跑车(Reed, 2020)。
04 虚拟现实和增强现实
对于虚拟现实和增强现实以及Web 3.0,也就是通常所说的元宇宙,让人兴奋。元宇宙是网络的3D版本,在这里所有的东西都有一个数字孪生体,可带来全新的体验、沉浸感和协作。
道路上已有了配备平视显示器(HUD)的车辆。HUD最终将叠加越来越多的数字内容,作为驾驶员的增强现实——例如,3D导航投影,甚至可能是3D视频通话。会有天气预报吗?
在极端情况下不会有挡风玻璃;前面将是一个固体装置。巨大的屏幕将取代挡风玻璃,以完全虚拟的视野取代该空间。一旦达到L5级自动驾驶,就真的完全不再需要传统的挡风玻璃了。
日产在这里提供了一个引人入胜的愿景。
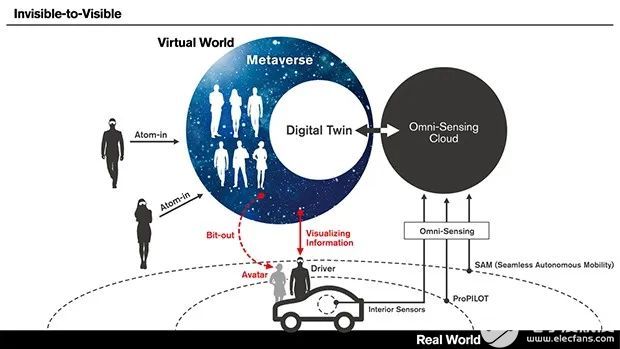
图4. 从看不见的到可见的,图片来源:日产
总结
这一系列文章追溯到最初称为Speedostat的机械巡航控制,经历了ADAS从机械到电子的演变,一直到软件定义的车辆和全自动驾驶的愿景和元宇宙的沉浸。
目前汽车行业的转型是电气化的,技术正在快速变化。当我们为新的模式和变化感到兴奋时,回顾过去和我们今天认为理所当然的系统的有趣历史也是有帮助的。
参考文献
Barnden, C. (2021, May 13). Busting Myths of Driver Monitoring Systems. Retrieved from EE Times: https://www.eetimes.com/busting-myths-of-driver-monitoring-systems/
Dinges, D. (1995). An Overview of Sleepiness and Accidents. J. Sleep Res. 4, Suppl. 2, 4-14. Retrieved from https://onlinelibrary.wiley.com/doi/epdf/10.1111/j.1365-2869.1995.tb00220.x
Howard, B. (2014, July 18). What are car surround view cameras, and why are they better than they need to be?, Part Two. Retrieved from Extreme Tech: https://www.extremetech.com/extreme/186160-what-are-surround-view-cameras-and-why-are-they-better-than-they-need-to-be/2
Morris, B.(2021, March 29). EE Times. Retrieved from E/E Architecture Considerations for AV Development: https://www.eetimes.com/e-e-architecture-considerations-for-av-development/
NHTSA. (1998). Drowsy Driving and Automobile Crashes. n/a: n/a. Retrieved 11 30, 2021, from https://rosap.ntl.bts.gov/view/dot/1661
Reed, E. (2020, October 5). History of Tesla: Timeline and Facts. Retrieved from TheStreet: https://www.thestreet.com/technology/history-of-tesla-15088992
Unknown. (2021, December 1). Invisible-to-Visible (I2V). Retrieved from Nissan Motor Corporation: https://www.nissan-global.com/EN/TECHNOLOGY/OVERVIEW/i2v.html
Unknown. (2021, December 1). Software-Defined Vehicles - A forthcoming Industrial Evolution. Retrieved from Deloitte: https://www2.deloitte.com/cn/en/pages/consumer-business/articles/software-defined-cars-industrial-revolution-on-the-arrow.html
-
gaio产品手册,嵌入式工具学习;34年历史;2013-08-08 1729
-
电源的百年历史2009-10-17 759
-
美“百年星舰”宇宙探索计划 欲带人类冲出太阳系2012-09-09 1094
-
美的的库卡:工业机器人企业的百年历史与近年市场分析2018-05-11 13746
-
百年汽车造型的变化,并不仅仅是为了好看?2018-06-21 5163
-
铁打营盘百年流水线,永恒旋律百年不变2018-08-27 2337
-
伦敦百年历史的八盏路灯将在未来几周内换成LED光源2018-12-11 1960
-
中国最顶尖的城市,迎来百年巨变2019-04-29 2996
-
汽车大灯的演变之路有百年历史2019-08-22 6009
-
那些百年汽车品牌如今发展如何?2020-10-27 2991
-
创牌15年成为高端第一,缘何百年城堡选中她?2021-10-12 556
-
接收器百年创新史选编2023-11-23 397
-
汽车ADAS进化的百年历史(一)2023-12-06 1587
全部0条评论

快来发表一下你的评论吧 !
