

汽车CAN总线数据传输系统构成及工作原理
接口/总线/驱动
描述
CAN总线的总体结构
CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。CB311CAN总线的结构如图1所示。
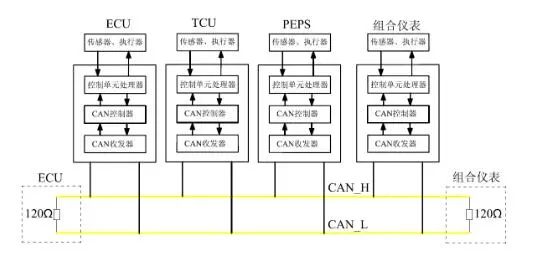
图1 CB311 CAN总线的总体结构
1、CAN控制器
CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
2、CAH收发器
CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。
3、数据传输线
为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。
4、数据传输终端
数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。
汽车CAN总线数据传输系统构成及工作原理
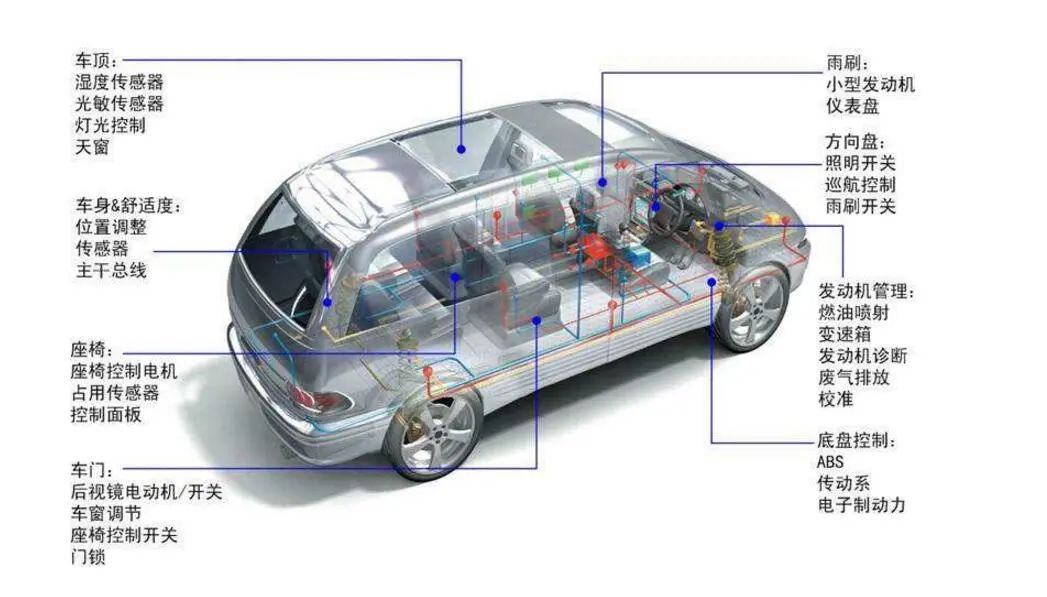
现代汽车的电控单元主要有主控制器、发动机控制系统、悬架控制系统、制动防抱死控制系统(ABs牵引力控制系统、AsR控制系统、仪表管理系统、故障诊断系统、中央门锁系统、座椅调节系统等。所有这些子控制系统连接起来构成1个实时控制系统,即:指令发出去之后,必须保证在一定时间内得到响应,否则,就有可能发生重大事故。这就要求汽车上的cAN通信网络有较高的波特率设置。另外,汽车在实际运行过程中,众多节点之间需要进行大量的实时数据交换。若整个汽车的所有节点都挂在1个cAN网络上,众多节点cAN总线进行通信,信息管理配置稍有不当,就很容易出现总线负荷过大,导致系统实时响应速度下降。这在实时系统中是不允许的,因此在对汽车上各节点的实性进行了分析之后,根据各节点对实时性的要求,设计了高、中、低速3个速率不同的CAN通信网络,将实时性要求严格的节点组成高速cAN通信网络,将其它实时性要求相对较低的节点组成中速cAN通信网络,将剩下实时性要求不是很严格的节点组成低速CAN通信网络。并架设网关将这3个速率不同的3个通信网络连接起来,实现全部节点之间的数据共享。
汽车CAN总线故障产生的原因
CAN总线系统中拥有一个CAN控制器、一个信息收发器、两个数据传输终端及两条数据传输总线,除了数据总线外,其他各元件都置于各控制单元的内部。分析CAN总线系统产生故障的原因一般有以下三种:
1.汽车电源系统引起的故障:汽车电控模块的工作电压一般在10.5-15.0V,如果汽车电源系统提供的工作电压不正常,就会使得某些电控模块出现短暂的不正常工作,这会引起整个汽车CAN总线系统出现通信不畅。
2.汽车CAN总线系统的链路故障:当出现通信线路的短路、断路或线路物理性质变化引起通信信号衰减或失真,都会导致多个电控单元工作不正常,使CAN总线系统无法工作。
3.汽车CAN总线系统的节点故障:节点是汽车CAN总线系统中的电控模块,因此节点故障就是电控模块的故障。它包括软件故障即传输协议或软件程序有缺陷或冲突,从而使汽车CAN总线系统通信出现混乱或无法工作,这种故障一般会成批出现;硬件故障一般是电控模块芯片或集成电路故障,造成汽车CAN总线系统无法正常工作。
万用表测量诊断CAN总线方法详解
系统概览:
此说明用于检查总线连接上的CAN高速和CAN低速信号电平是否正确。
检测提示:
●电压检测(示波器):电压检测的前提条件是,蓄电池已连接并且点火开关已接通。
●电阻测量:在电阻测量时,在测量前必须把待测部件断电。为此应断开车辆蓄电池的接线。等待约3分钟,直到系统中的所有电容器放完电。
数据总线 K-CAN (车身 CAN)、PT-CAN (传动系 CAN) 和 F-CAN (底盘 CAN) 之间的区别:
● K-CAN:数据传输率约 100 kBit/s。可以进行单线运行。
● PT-CAN:数据传输率约 500 kBit/s。不能进行单线运行。
● F-CAN:数据传输率约 500 kBits/s。不能单线运行
主控单元
主控单元是主动式通信方,通信的主动权由它发出。主控制单元掌控总线,并控制通信。主控制单元能够在总线系统中向被动式总线用户 (副控制单元) 发送信息,并根据被动式用户的要求接收信息。
副控单元
副控制单元是一个被动式通信用户。副控制单元被要求接收和发送数据。
多主控单元系统
在一个多主控单元系统中所有的通信用户在某个时间都能够担当主控单元或副控制单元的角色。
示波器测量
为了弄清 CAN 总线是否完好工作,必须观察总线上的通信情况。在这种情况下不需要分析单个位,而只需要观察 CAN 总线是否工作。示波器测量说明:‘CAN 总线很可能无故障工作’。
如果用示波器测量 CAN 低 (或 CAN 高) 导线和接地之间的电压,则获得一个处于下列电压极限范围内的类矩形波信号:
K-CAN:
CAN Low (低速) 对地:U 最小 = 1 V,U 最大 = 5 V
CAN High (高速) 对地:U 最小 = 0 V,U 最大 = 4 V
这些值都是近似值,根据总线上的负载可能有几个 100 mV 的偏差
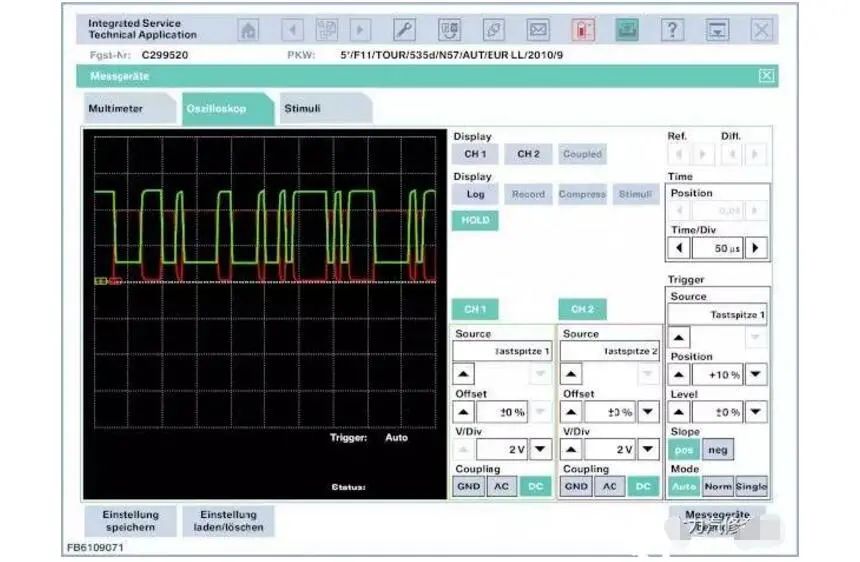
测量 K-CAN:CH1 CAN 低,CH2 CAN 高
如果用示波器测量 CAN 低 (或 CAN 高) 导线和接地之间的电压,则获得一个处于下列电压极限范围内的类矩形波信号:
PT-CAN 和 F-CAN:
CAN Low (低速) 对地:U 最小 = 1.5 V,U 最大 = 2.5 V
CAN High (高速) 对地:U 最小 = 2.5 V,U 最大 = 3.5 V

测量 PT-CAN:CH1 CAN 低,CH2 CAN 高
总线端测量
当 K-CAN 或 PT-CAN 数据总线失效时,在 CAN-Low 或 CAN-High 导线上可能存在短路或断路。或者某个控制单元已损坏。
为了查找故障原因,建议进行下列工作步骤:
● 将总线用户从 CAN 总线上依次拔下,直至找到故障原因 (= 控制单元 X)。
● 检查通往控制单元 X 的导线是否短路或断路。
● 如有可能,检测控制单元 X。
● 如果某个控制单元至 CAN 总线的分支线短路,仅执行该工作步骤就成功了。如果 CAN 总线中的一条导线自身短路,则必须检查电线束。
审核编辑:汤梓红
-
基于DSP_技术和CAN总线的多节点远程数据传输系统2012-08-17 2762
-
汽车CAN总线技术2015-06-24 4363
-
通过RS485总线或者CAN总线的方式达到数据传输2021-08-23 1720
-
基于SPI总线的无线数据传输系统设计2010-03-13 4333
-
数字数据传输(DDN),数字数据传输(DDN)的工作原理是什2010-03-19 3086
-
SOPC实现的PCI总线高速数据传输系统2012-02-10 1921
-
汽车can总线工作原理及测量方法详解2018-04-25 151766
-
汽车CAN总线数据传输系统构成及工作原理2022-12-02 4688
-
CAN总线在野外地震数据传输中的应用2023-10-08 472
-
医疗设备CAN/CANopen总线数据传输解决方案2024-03-18 3874
-
can总线的数据传输过程是什么2024-06-16 5425
-
汽车CAN总线的特点和应用2024-09-30 3046
-
CAN总线数据传输速率设置2024-11-12 4918
-
CAN总线数据传输速率 CAN总线在汽车中的应用2024-11-21 3264
-
总线数据传输的安全性分析2024-12-31 1800
全部0条评论

快来发表一下你的评论吧 !
