

为未来的软件定义汽车开发可扩展的运动主控制器Master Controller
汽车电子
描述
电气化正在大力扩展汽车运动功能的范围。每一个新功能都相当于更多的软件。这反映在更集中的E/E架构的趋势上,即采用更少但更强大的控制器。在硬软件共同开发的过程中,Vitesco技术公司正在为未来的“软件定义汽车”开发可扩展的“运动主控制器(Master Controller Motion)”平台。
在纯内燃机驱动的车辆中,一个典型的发动机控制系统包括大约80个功能,它们分布在大约200万行代码中。随着电气化的发展,功能范围大大扩展。
因此,软件的份额在不断增加,到目前为止,电子控制单元(ECU)的数量也在增加。功能相当单一的发动机与动力驱动领域变成了更为全面的“车辆运动(Vehicle Motion)”领域。其包括从充电到电池管理、电机控制、动力回收、热管理、能量分配和预测性节能驾驶,以及通过云连接管理大数据和定期更新驾驶软件等众多功能。
到2025年左右,特别是电气化预计将使运动控制单元的软件量比传统的发动机控制增加5倍,达到800万至1000万行代码,如图1。
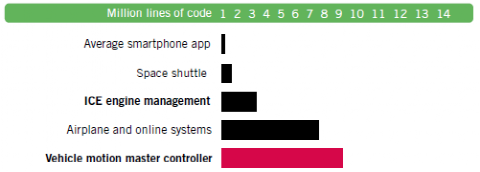
图1. 随着电气化的发展而增加的软件数量 (来源:Vitesco)
到目前为止,各个动力系统的ECU是以独立ECU的形式被集成到车辆中。电气化增加了与运动相关的ECU之间互联的复杂性,因此需要从以前的单独ECU过渡到一个更加集成的解决方案,这就产生了新的挑战,如图2。鉴于未来几年将逐步过渡到更集中控制架构的车辆数量的不断增加,将变为以软件应对复杂性、并降低成本,因此针对新的软件变革的新硬件将是关键。这需要可扩展的平台,要能够将今天已有的软件逐步迁移到新的、更集中的硬件,同时能够搭载新的功能。

图2. 传统的E/E架构向新的架构演化,变得更加集中,降低了网络的复杂性(来源:Vitesco)
架构上的挑战
Vitesco作为Autosar公司的共同创始人和核心成员,利用其在动力系统方面的软件专长,进一步改进软件和硬件。目前正在开发中的“运动主控制器(Master Controller Motion)”与以前的动力总成领域控制器不同。其可以与区域控制器一同使用CP Flexibility的“软件集群Software Cluster”技术以及完全的微控制器虚拟化技术,如图3。
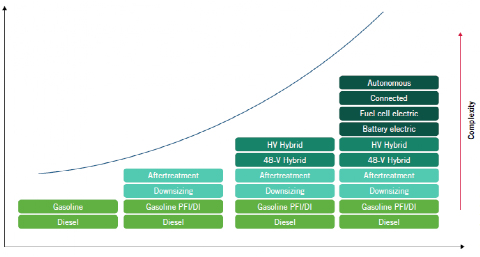
图3. 可扩展的Master Controller的性能水平可以满足车辆中的功能 (来源:Vitesco)
Master Controller能够在一个硬件上集成越来越多的车辆运动和能量管理领域的功能,并确保动力域的高可用性和最高质量。其主要挑战包括、将功能从单个ECU移植到Master Controller的Software Cluster中。这方面的一个关键是多核微控制器虚拟化。在不影响其他功能的情况下,随时添加或更新来自不同制造商的个别功能的能力正变得越来越重要。鉴于运动领域的功能越来越多,Vitesco已经与Vector、ETAS和Elektrobit等专业公司建立了伙伴关系。
共同开发的软件解决方案
在车辆运动的集中控制单元中,各种功能的组合和共存导致软件的规模比以前的单个ECU大得多。因此,Master Controller内的整体软件系统比单个ECU上的各自软件包要复杂得多。这些包括在Autosar Classic中的控制功能,通常由许多单独的功能组成。
此外,还引入了基于Autosar Adaptive的Linux等操作系统的面向服务的架构,这对硬件提出了不同的要求。微控制器和微处理器的基础软件层在此有很大不同。因此,必须考虑到实现微控制器类似于微处理器层面更快的更新周期,为此已经开发了“软件集群Software Cluster”和虚拟嵌入式应用veApp技术。
除了技术之外,要想成功还需要一个软件系统架构师和软件集成商,将各个软件组件组合成一个独立的、稳定的整体系统,与各个系统相比,具有强大的动态功能行为。Autosar包括许多标准的软件定义,但到目前为止还不是ECU完整功能所必需的一切。
因此,一个仅由Autosar标准组件组成的软件系统是不能单独执行的。仍然需要定制的、特定领域的软件,最重要的是,需要系统能力。一个系统的许多单独的组件最终必须被整合成一个有效的整体,作为为每辆车量身定做的配置。 为了在“软件集群Software Cluster”概念的意义上分离单个设备的基本单个功能,并将其重新分配到中央ECU上,需要对时间行为进行仔细分析。
一个基于逻辑执行时间(LET)的动态参考架构,在全系统范围内,使这成为可能。然后,分离和重新划分的功能可以被整合到为它们量身定做的参考架构的时间片中。LET保证了时间关键的事件链的确定性数据行为。所有这些都可以用Autosar手段来描述,从而实现了按计划映射模型功能。 在更集中的架构背景下,开发者网络将以伙伴关系的方式共同工作。ECU被重新划分,考虑到今天的车辆规模,将以成本优化的方式逐渐合并成中央控制单元。
最重要的是,新的软件技术是这方面的先决条件。Vitesco正在通过新的框架veApp为跨公司和跨领域的合作创造最新的机会。这个框架封装了以前各个ECU的软件域,并允许单独的应用程序动态对接到Master Controller Motion架构内的接口。这方面的基础是在多核架构方面的丰富经验,以及“软件集群Software Cluster”概念。
具有分离技术的框架还确保了一个确定的、动态的架构,在这个架构中,一个功能的新版本可以被安装而不影响其他功能的时间行为。与具有更广泛操作系统的Autosar Adaptive架构相比,veApp框架通过所有功能或应用程序的共同子结构,为实时性更强的Autosar Classic形成相应的灵活性。这为内存需求在兆这个级别的功能提供了灵活和更精简的集成技术,而Autosar Adaptive应用在千兆的范围内。
硬件解决方案的共同开发
考虑到逐渐过渡到更集中的架构和各自动力系统拓扑结构的多样性,Master Controller硬件被设计成一个可扩展的模块化系统,以满足不同的要求,如图4。这种新硬件的前身是域控制器。随着区域架构的引入,它们原先分布的硬件和功能将被大规模扩展。Master Controller Motion是管理车辆运动的 "大脑",与新的软件技术相结合,在整合平台的意义上实现了前所未有的灵活性。以前孤立的系统可以被整合,并在各组织间独立优化,如图5。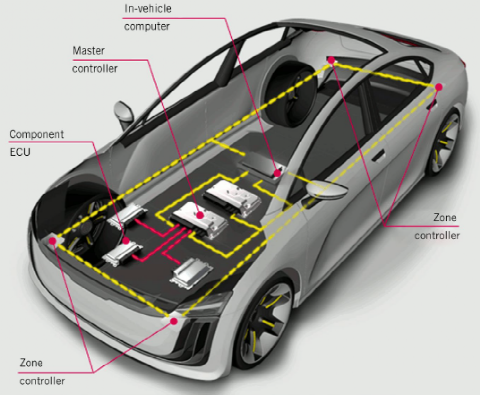
图5 带有主控制器和区域控制器的集中式结构 ( Vitesco Technologies GmbH (专属权利))
Master Controller的命令通过即所谓的区域控制器在现场执行。与Master Controller相比,区域控制器的重点是控制大量的输入和输出,网关功能和电源或配电,包括电子保险丝。区域控制器的计算能力也是可扩展的,为各种传感器和执行器服务。Master Controller和区域控制器的互补相互作用大大简化了E/E结构,并减少了车辆中ECU的数量。
这里使用的大量硬件技术,例如关于热和机械的实现,来自于多年来在发动机控制单元的专业知识。电子方面的可扩展解决方案空间是平台架构的一部分,并为未来在功能安全和特别是系统可用性方面的扩展要求提供所有选项。这涵盖了广泛的应用,直到自动驾驶汽车,为新的车辆功能提供了稳定的基础,同时最大限度地降低了实施成本。
总结与展望
Master Controller Motion中更高的集成度有助于在软件中掌控以前ECU网络的复杂性。该平台的可扩展性使得不同品牌和不同动力系统拓扑结构的车型可以逐步转移到新的E/E架构中。
随着Master Controller Motion在未来车辆运动领域更集中的E/E架构中,有一套技术可以应对电气化车辆中大量增加的功能。它采用了硬体和软件的新技术。通过“软件集群(Software Cluster)”、veApp框架或两者的结合,使许多功能在中央ECU中的应用共存成为可能。
通过这种方式,个别功能可以被更新,而不必重新生成和发布整个系统。由于来自不同来源和类型的许多软件模块的高度复杂性,对于一个有效的整体解决方案来说,Master Controller中整个系统的能力来自各个来源的密切协调是至关重要的。新的软件技术使其更容易在新的合作框架内将来自不同来源的各个功能和算法组合起来。
作为一个全面的车辆运动的多功能 "大脑",通用的Master Controller将在更集中的架构中与更多的车辆专用区域控制器一起工作。这些控制器,通过其本地的输入和输出,确保运动指令的安全执行。
审核编辑:刘清
-
基于DSP与FPGA的运动控制器设计2009-09-19 3837
-
一种基于MCX514的四轴运动控制器设计方案2017-09-22 4459
-
运动控制器如何选择2019-09-12 3235
-
PYNQ框架如何开发可重构运动控制器2021-01-07 1645
-
纳米软件案例之精密运动控制器程控软件2021-01-12 7294
-
STM32Cube的传感器和运动算法软件扩展2023-09-08 1080
-
基于DSP的运动控制器的开发2009-12-25 2492
-
基于MCX314的运动控制器设计2011-05-17 1605
-
基于SoftServo软件运动控制器特点及应用2017-10-02 1073
-
基于GUS Controller运动控制器软件调试及接线2017-10-12 2055
-
基于软件定义网络控制可扩展性研究2017-12-19 1304
-
PYNQ框架下开发可重构运动控制器2022-02-08 1992
-
SuperCAT:软件定义EtherCAT运动控制器2023-06-21 1869
-
软件定义汽车vECU虚拟控制器集成开发与测试2023-11-09 3070
-
解锁未来汽车电子技术:软件定义车辆与区域架构深度解析2025-04-27 1920
全部0条评论

快来发表一下你的评论吧 !
