

主平面位置在镜头的解析及设计介绍
电子说
1.4w人已加入
描述
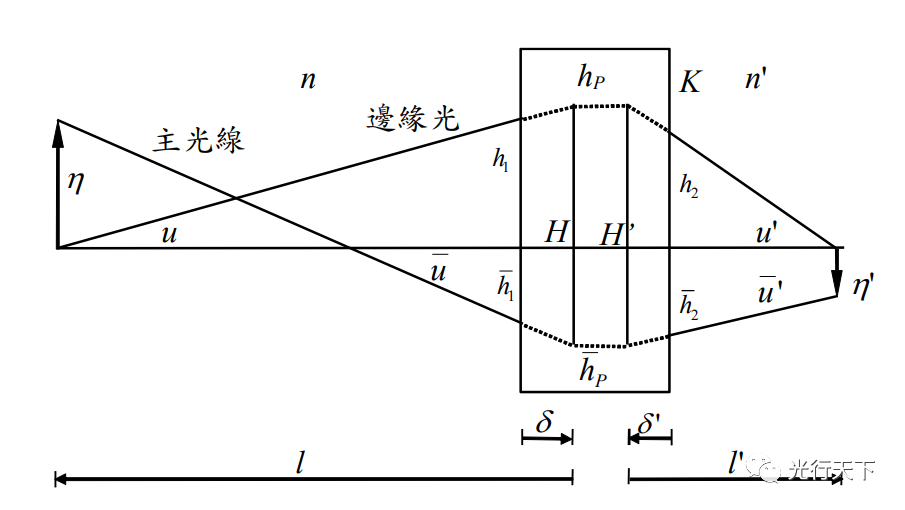
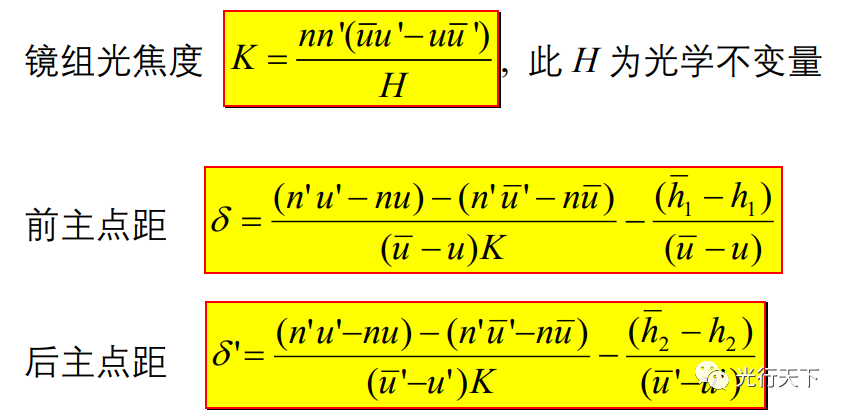
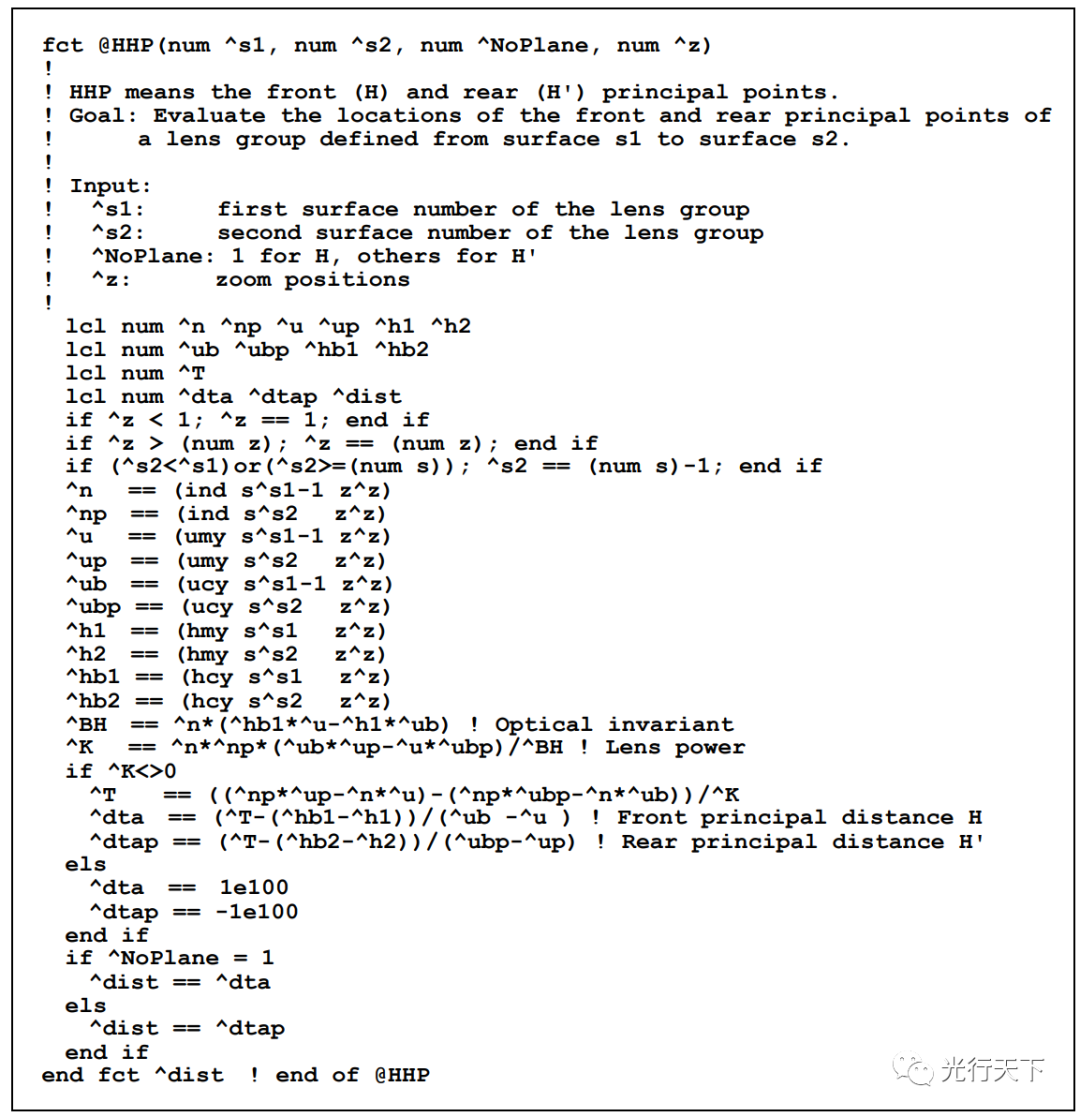
一镜组之主平面位置(H 和 H’)可以根据具体结构用矩阵光学计算得出,但也可以应用边缘光和主光线之入出射高度及角度求得,公式如下:
 是光线在镜组入射面的高度。
是光线在镜组入射面的高度。 是光线在镜组出射面的高度,不是第二面的意思。
是光线在镜组出射面的高度,不是第二面的意思。
Code V计算主平面位置的函数程序代码
Code V 案例 Dbgauss.len。系统焦距f= 100
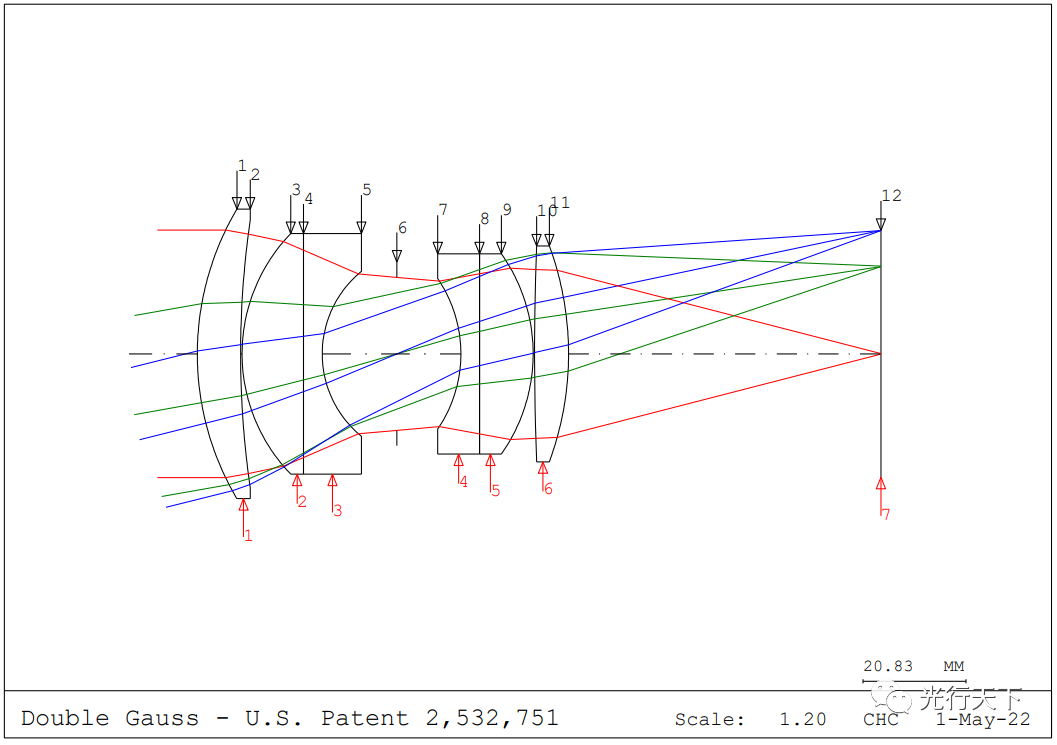
前镜组焦距及其前后主点距离:
f1 = (EFY S1..5) = 225.306626507456
@HHP(1, 5, 1, 1) = -76.516112208416
@HHP(1, 5, 2, 1) = -68.279167776868
后镜组焦距及其前后主点距离:
f2 = (EFY S7..11) = 83.2795500732969
@HHP(7, 11, 1, 1) = 24.6445154406183
@HHP(7, 11, 2, 1) = 16.8212531011959
前镜组第二主点至后镜组前主点间距 d:
d = -@HHP(1, 5, 2, 1)+(OAL S5..7)+@HHP(7, 11, 1, 1) = 120.952745873786
系统光焦度 K = 1/f1 + 1/f2 -d/(f1*f2) = 0.00999995128111
系统焦距f= 1/K = 100.000487191308,和(EFY S1..11)结果是相同的。
了解及计算主平面位置在镜头的解析及设计上是非常有意义的,希望对各位有帮助。
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
VirtualLab Fusion应用:F-Theta扫描镜头的性能评估2025-03-05 915
-
VirtualLab Fusion应用:F-THETA 扫描镜头2025-03-06 721
-
[VirtualLab] F-Theta扫描镜头的性能评估2026-05-21 158
-
F-THETA 扫描镜头2026-05-22 46
-
机器视觉的镜头选择2012-10-22 3305
-
请问用摄像头识别小球在平面板上的位置要用什么型号的摄像头?2019-03-01 3326
-
浩辰3D软件新手入门攻略:草图平面2020-09-24 1602
-
介绍在PCB设计过程中电源平面处理应该考虑的基本要素2021-12-28 1402
-
镜头拍摄距离2009-12-23 4113
-
平面变压器的特点及优点介绍_平面变压器结构图2018-02-08 39730
-
实测:前置镜头位置是否影响自拍效果2020-09-02 6368
-
浮思特 | 红外热像仪镜头模组是什么?原理、结构与应用全解析2025-08-14 1579
-
沙姆镜头:倾斜对焦 让工业成像更精准2025-09-12 1341
-
沙姆镜头的工作原理及使用技巧2025-10-28 1286
-
远心镜头核心技术解析与应用2025-12-08 1039
全部0条评论

快来发表一下你的评论吧 !
