

常用的激光传感器测距的三角测量法
MEMS/传感技术
描述
工业生产中,经常需要对物体表面的相对距离和方位进行测量,主要有两种方式:接触式和非接触式。最常见的为非接触式激光传感器,它是利用激光技术进行测量的传感器。它的优点是能实现无接触远距离测量,速度快,精度高,量程大,抗干扰能力强等。
传感器中激光发射器通过镜头将可见激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。
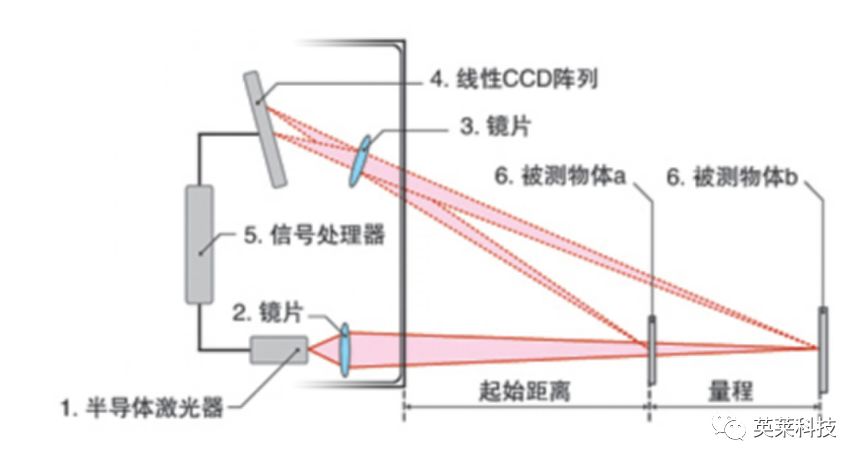
半导体激光器1被镜片2聚焦到被测物体6上。反射光被镜片3收集,投射到CMOS阵列4上;信号处理器5通过三角函数计算阵列4上的光点位置得到距物体的距离。
常见的激光三角测量法:
常用的激光传感器测距则会用到激光三角测量法,其中最为常见的有倾斜式激光三角测距法和直射式激光三角测距法,下面我们分别做介绍:
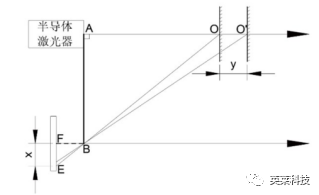
倾斜式激光三角测距法
由上图可知入射光AO与基线AB的夹角为α,AB为激光器中心与CCD中心的距离,BF为透镜的焦距f,D为被测物体距离基线无穷远处时反射光线在光敏单元上成像的极限位置。DE为光斑在光敏单元上偏离极限位置的位移,记为x。当系统的光路确定后,α、AB与f均为已知参数。由光路图中的几何关系可知△ABO∽△DEB,则有边长关系:
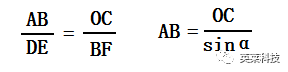
则易知:
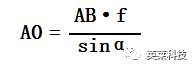
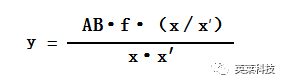
在确定系统的光路时,可将CCD位置传感器的一个轴与基线AB平行(假设为y轴),则由通过算法得到的激光光点像素坐标为(Px,Py)可得到x的值为:

其中CellSize是光敏单元上单个像素的尺寸,DeviationValue是通过像素点计算的投影距离和实际投影距离x的偏差量。当被测物体与基线AB产生相对位移时,x改变为x′,由以上条件可得被测物体距离y为:

直射式激光三角测距法
如上图所示, 当激光光束垂直入射被测物体表面, 即入射光线与被测物体表面法线共线时, 为直射式激光三角法。由光路图,仿照斜射式激光三角测距法的结论可知:
斜射式和直射式激光三角测距法均可实现对被测物体的高精度、非接触测量, 但两者之间存在区别,主要有以下几点:
● 斜射式激光三角法成像的光斑较大,光强不集中, 随入射角度的变化有差异, 体积比直射式大, 测量范围小, 但直射式的分辨率没有斜射式的高。
● 斜射式激光三角法在被测物体发生位移时, 被测物体上的光斑将照射在不同位置,对被测物体上某一定点, 无法确定其位移情况,而直射式的光斑与位置是一一对应的。
基于直射式激光三角法在几何算法上更为简单, 误差较之斜射式小, 且体积可以设计得更为紧凑小巧, 故工程应用上常采用直射式激光三角法。
编辑:黄飞
-
激光三角法测距传器的设计与实现2011-01-07 1102
-
常用传感器原理2012-07-11 21607
-
什么是激光位移传感器,为何如此受投资界的关注2018-10-22 1575
-
激光位移传感器的激光三角测量法原理和回波分析原理2019-01-09 15317
-
激光测距传感器的分类与应用2019-09-26 4360
-
三角测量传感器可实现很高的测量精度2020-08-21 1447
-
Micro-Epsilon的激光三角测量传感器为位移和距离测量设定了新标准2020-09-22 3690
-
简析激光三角测量技术的发展应用前景2020-10-22 7054
-
激光位移传感器的测距原理及使用方法2020-11-17 13895
-
激光三角测量方法在不同场景的应用2021-11-01 7470
-
激光位移传感器与其他位移传感器的比较2022-01-25 1988
-
三角测距是什么意思?三角测距原理图解2022-06-21 42808
-
小型激光位移传感器激光测量原理2022-09-01 2354
-
三角法测距原理2023-07-08 9271
-
基于激光三角测距法的激光雷达原理2023-12-25 2455
全部0条评论

快来发表一下你的评论吧 !
