

A3与BLDC电机使用过程记录
描述
众所周知也是我的桌子也是符合这个物理上面的熵增定理,简单来说就是:越来越乱,直到。。。。。你掉个手机找不到的时候,那就不得不去整理一下了。我也不记得具体是哪个宝贝说,桌子乱的人具有极强的创造性(兄弟就冲你这句击中人心巴的话,我高低得打赏你5毛钱)。
但是但是我也找不到为啥,它就老是乱糟糟的(只要我看着不心烦,心烦的就是别人)。
经过我一上午艰苦卓绝的工作,我终于搞到了锂电池,直接上电,别和我说什么正负极,老夫从来都不看这。

然后就是打开我们的调参软件,就会显示A3在线了
首次使用,这个就是恶霸条例,不同意就不要想用,嘤嘤嘤

这个图应该是一开始的电池,我记得是缺电了
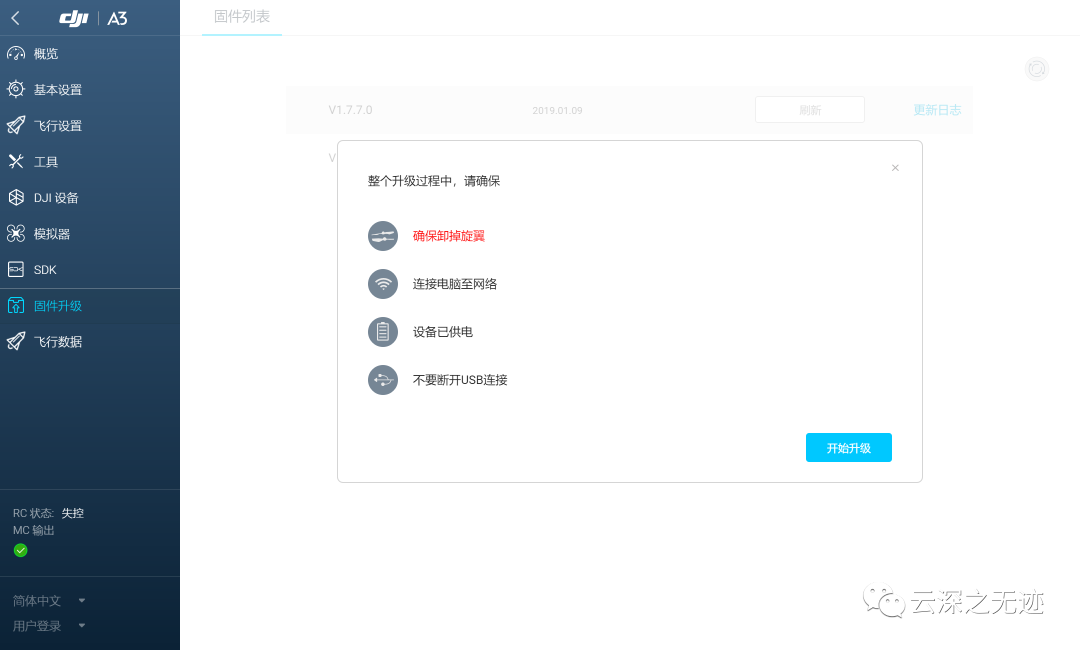
拿到以后先刷下固件
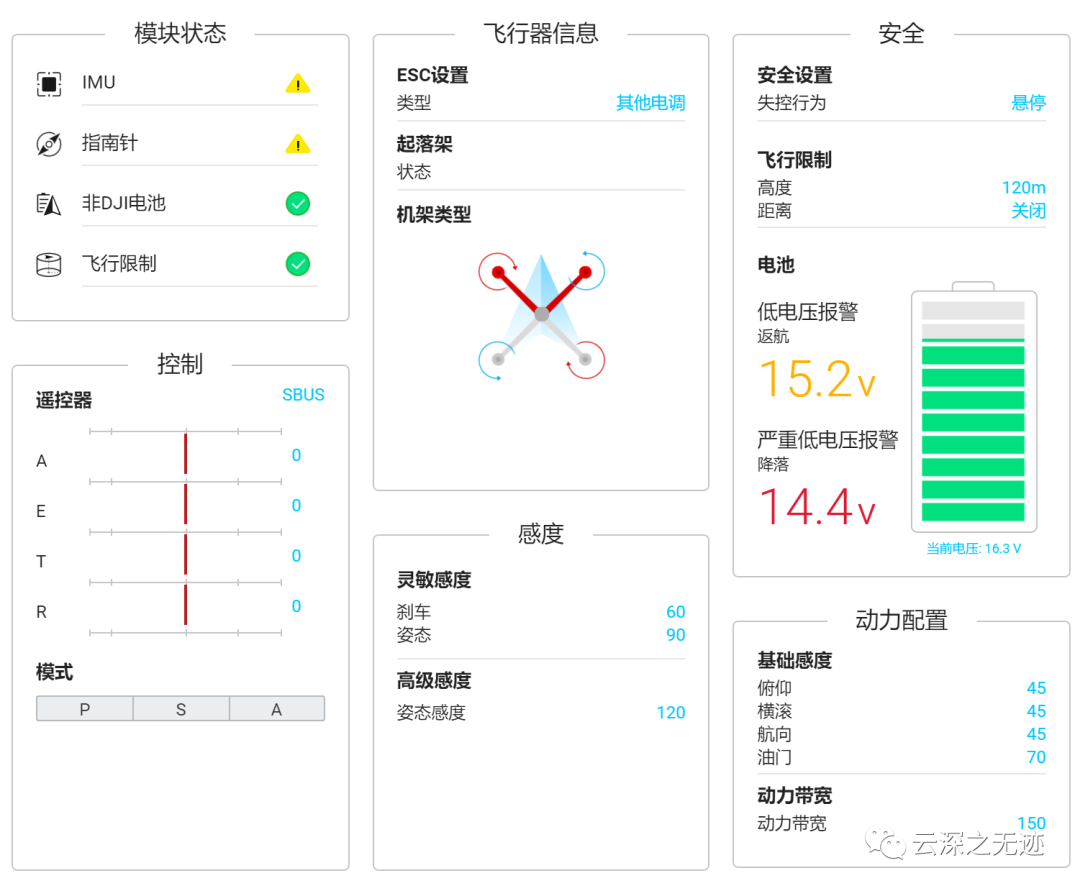
这个是没有装好的情况,没有电调,RC等
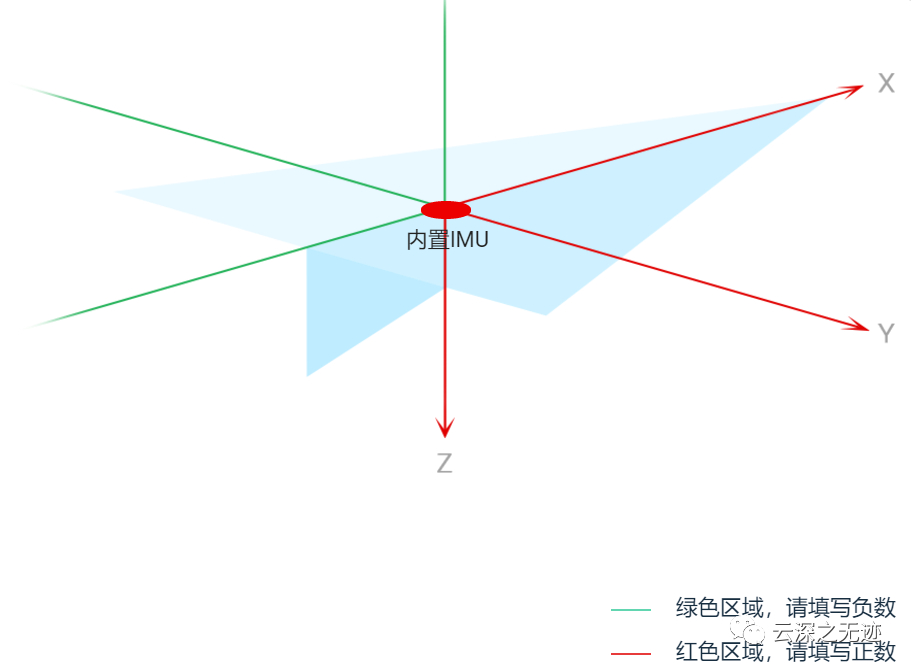
一般是要求飞控安装在重心的位置,假如不在,这里就需要设置一下
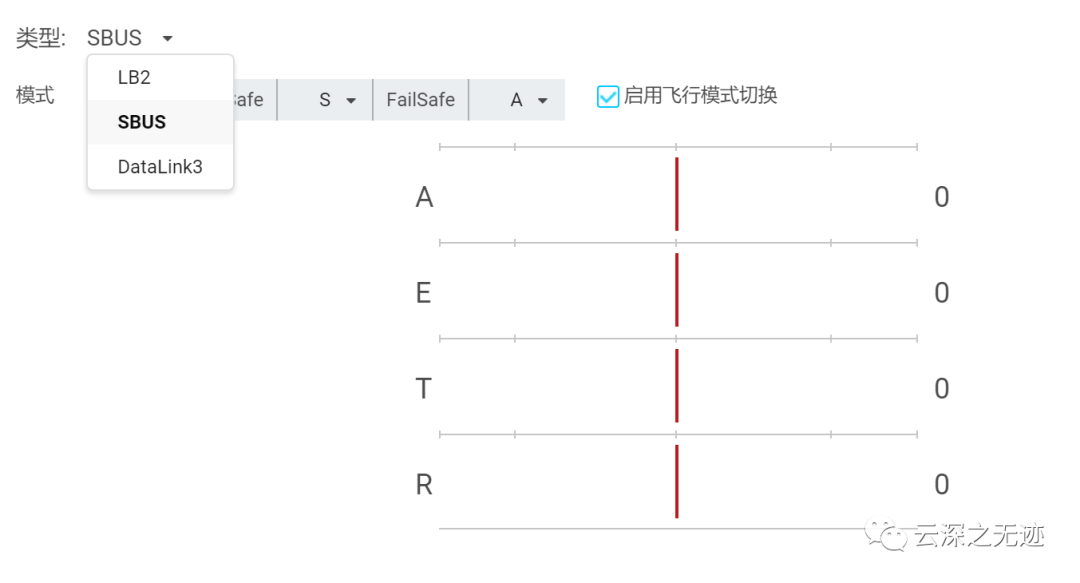
遥控器的协议上面可以使用SBUS
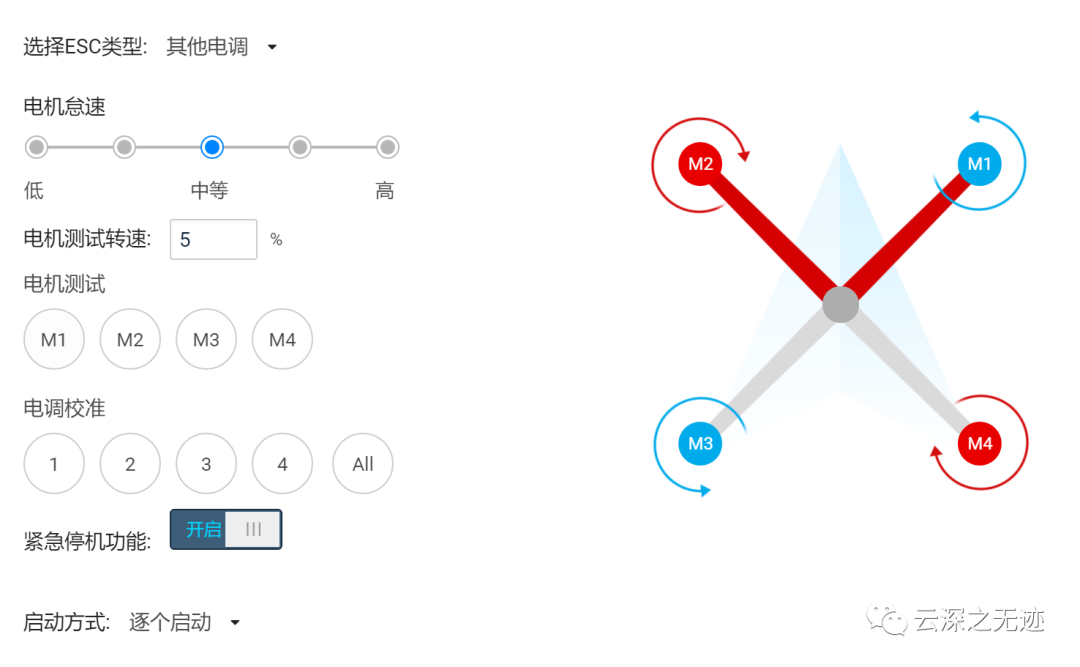
电调的设置参数就不多了,就是这些

插入的电池,可以准确判断电池的情况
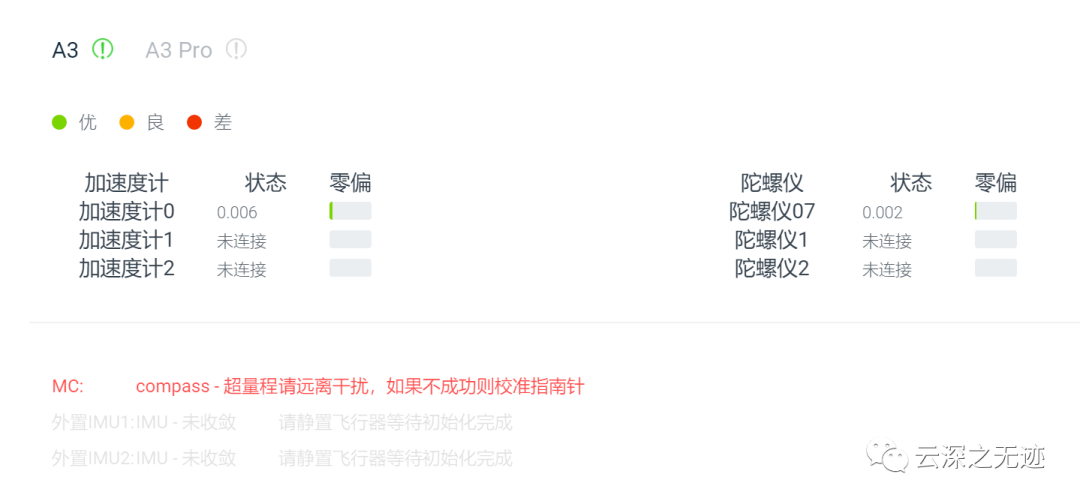
因为在桌子上面,都是电线,所以干扰严重
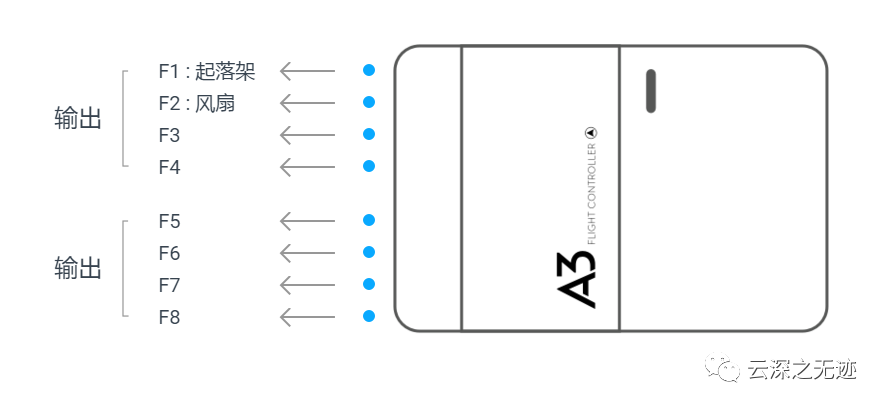
这个是FC的输出接口的重新映射
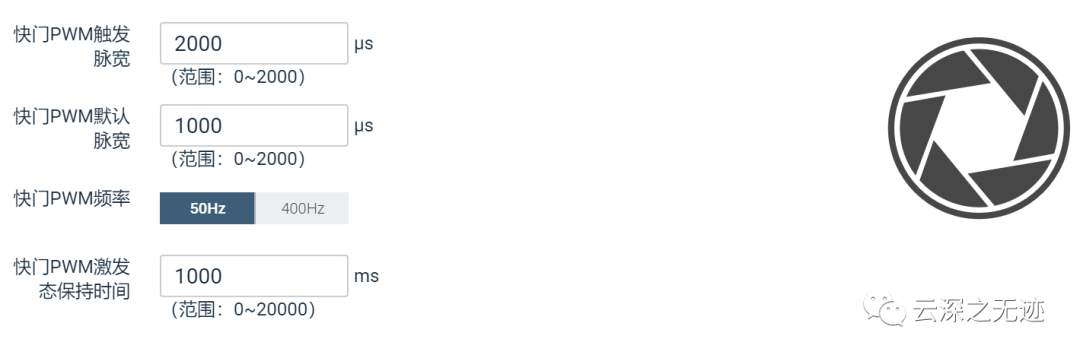
也支持相机的PWM快门触发
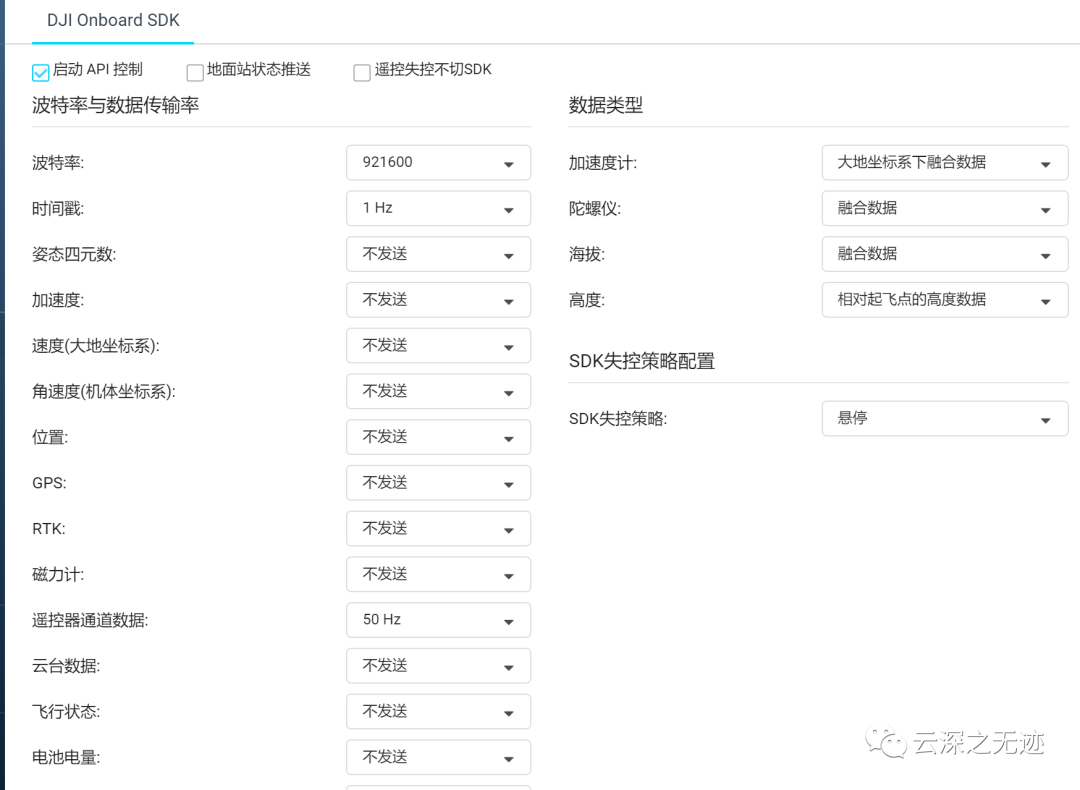
这个就是我们最感兴趣的东西了,OSDK的控制器
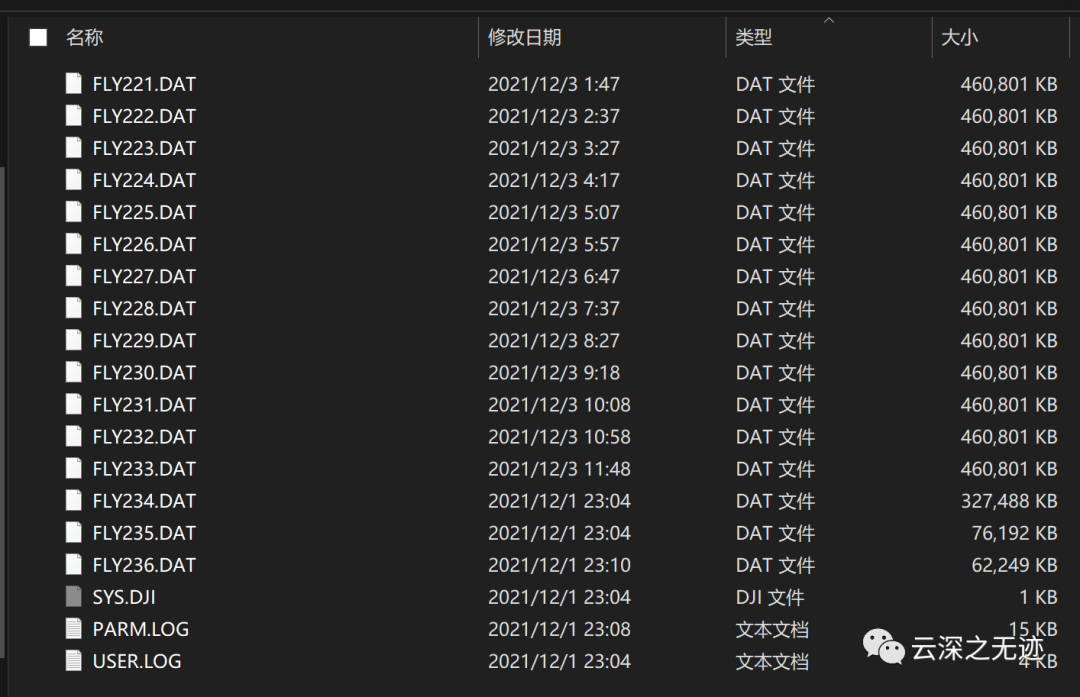
FC内部有一个不知道多大的Flash,可以看到就2021.12月飞了一次,然后就吃灰了。
传输到电脑的速度有点慢
电机收刮一套
BLDC电机的定子由铸钢叠片组成,绕组置于沿内部圆周轴向开凿的槽中。定子与感应电机的定子十分相似,但绕组的分布方式不同。多数BLDC电机都有三个星型连接的定子绕组。这些绕组中的每一个都是由许多线圈相互连接组成的。在槽中放置一个或多个线圈,并使它们相互连接组成绕组。沿定子圆周分布这些绕组,以构成均匀分布的磁极。
BLDC电机采用永磁体做转子,转子中是没有线圈的,而转子的南磁极和北磁极是交替排列的。
有刷和无刷电机的控制都是通过调节电压,只是无刷直流采用电子换向,所以要有数字控制才可以实现了,而有刷直流是通过碳刷换向的,利用可控硅等电路控制。
1、有刷马达调速过程是调整马达供电电源电压的高低。调整后的电压电流通过整流子及电刷地转换,改变电极产生的磁场强弱,达到改变转速的目的。这一过程被称之为变压调速。
2、无刷马达调速过程是马达的供电电源的电压不变,改变电调的控制信号,通过微处理器再改变大功率MOS管的开关速率,来实现转速的改变。这一过程被称之为变频调速。
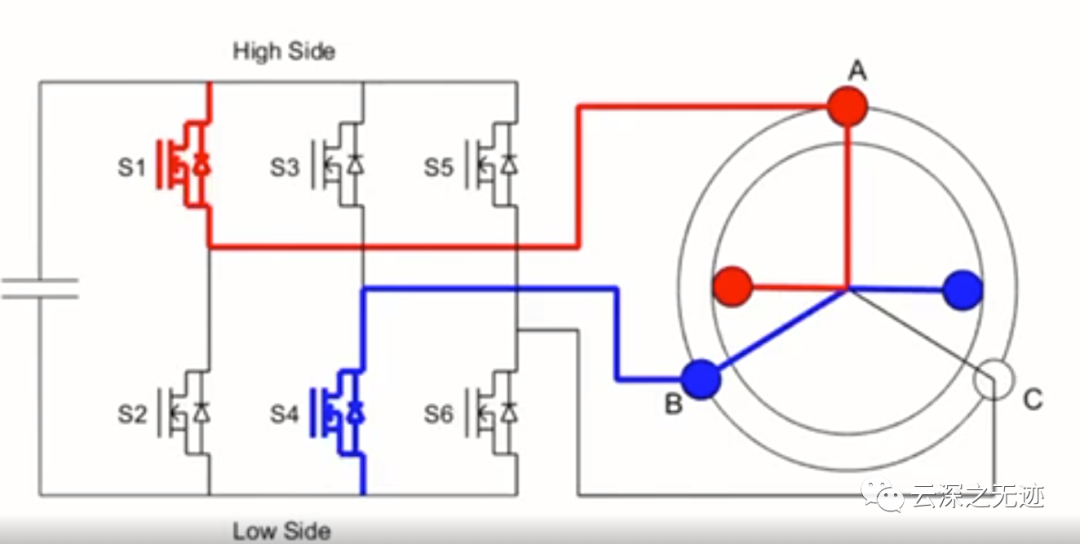
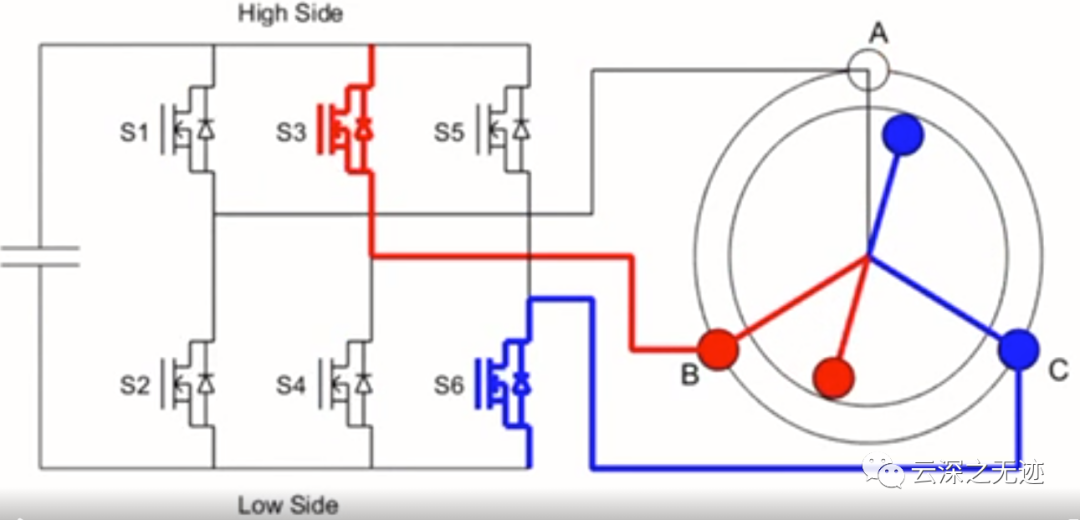
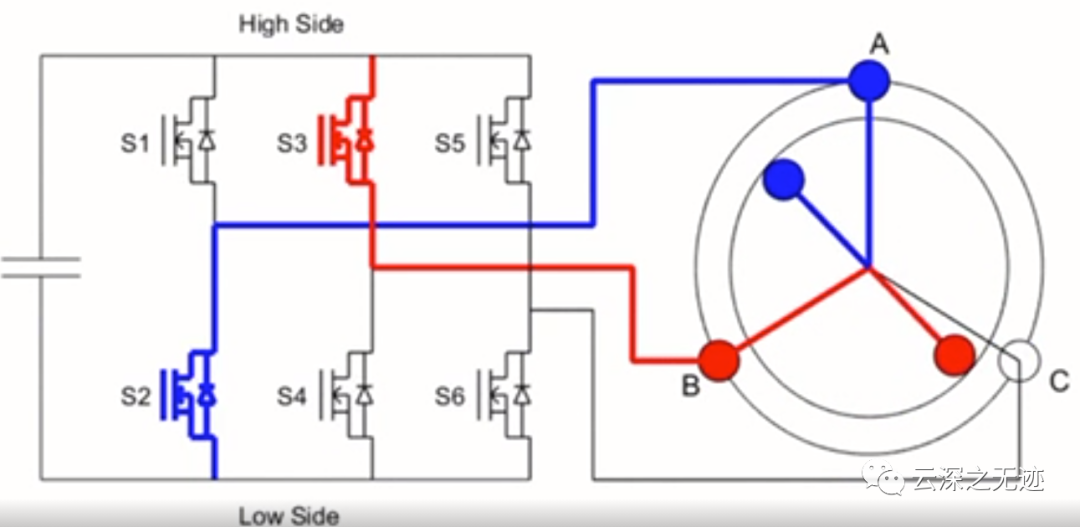
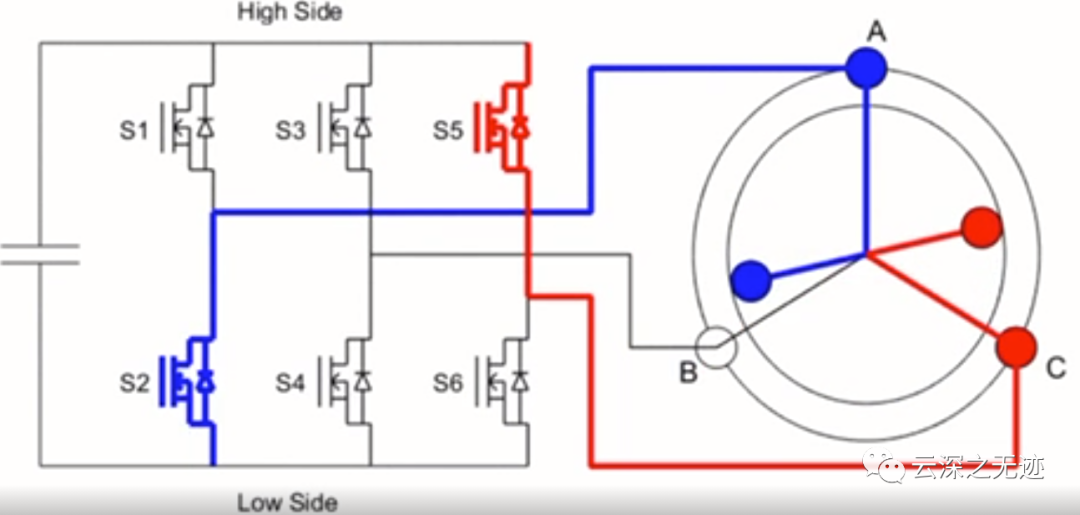
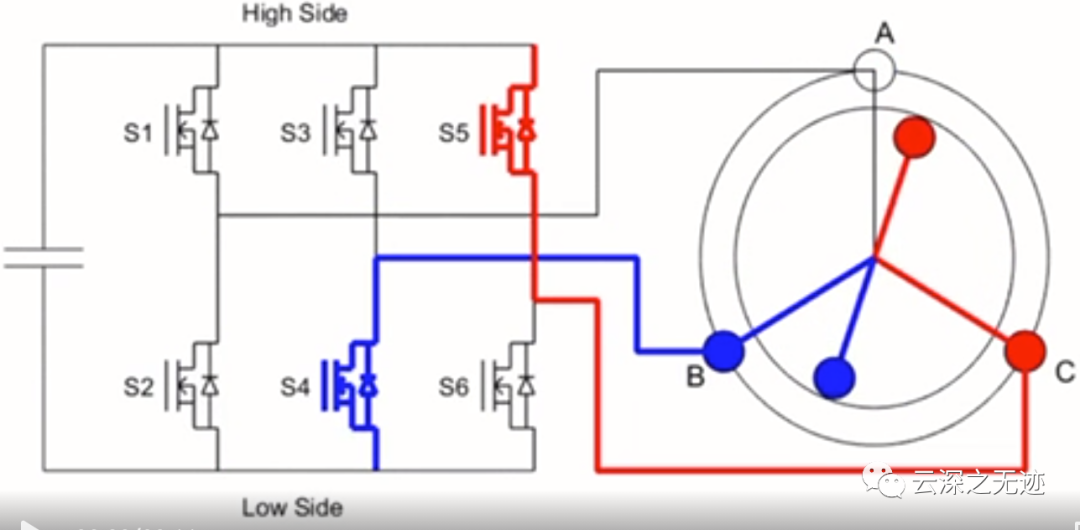
无刷电机采用3相线通电。电机本体的定子中,有与3相对应的线圈(数量为3 的倍数)。
各相线圈根据转子的转动位置进行换流(改变电流的方向)。通过改变换流速度与经PWM调制后的电压,控制电机的转动。逆变器的作用是利用直流电源(电池)生成各相的功率信号(交流生成电路)。
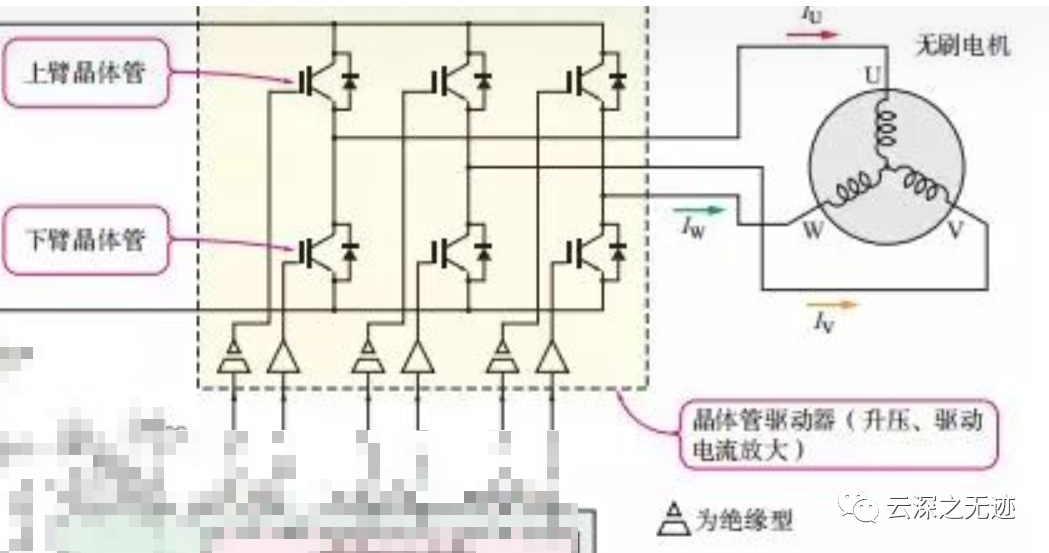
这个是开关元件
在这个电路图中,功率器件采用晶体管。晶体管起到高速开关的作用。像这样不工作在放大状态、起开关作用的器件,叫做“开关器件”。
看得清不?
这个怎么样?
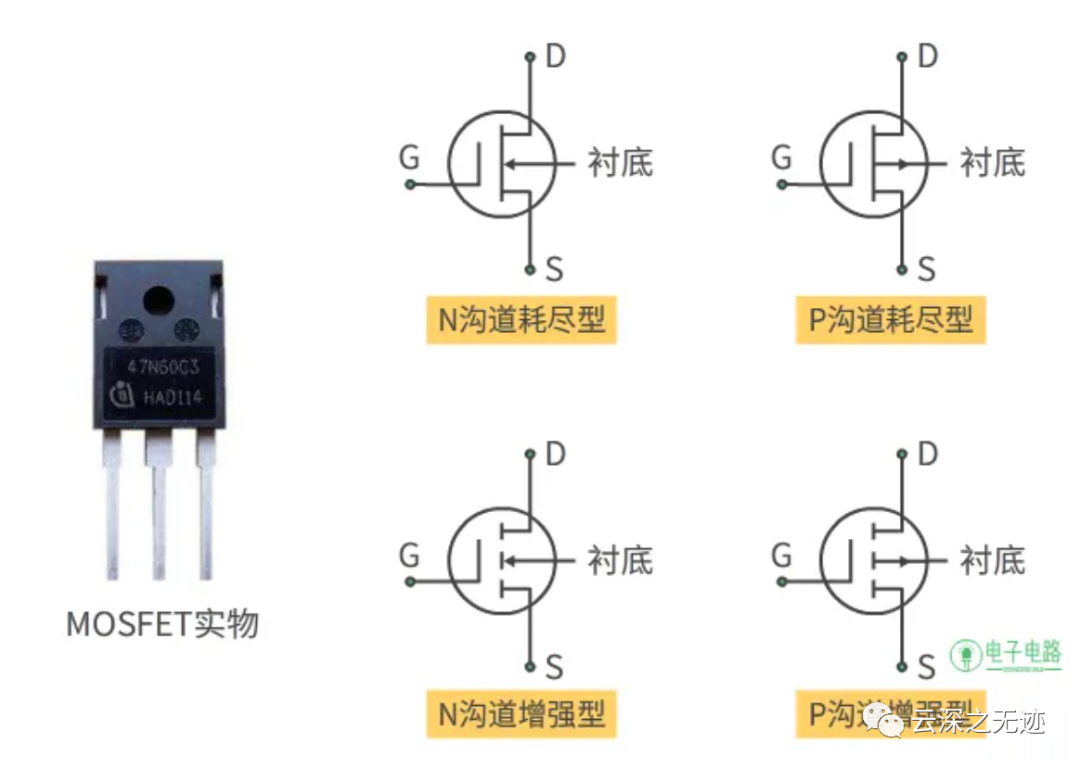
实际上,这里运用的并不是普通晶体管,而是MOSFET 或IGBT。图中晶体管左侧的端子叫做“基极”(晶体管)或“栅极”(MOSFET)。对基极/ 栅极施加电压时,电流从晶体管右上方的端子(集电极/ 漏极)向右下方的端子(发射极/ 极)流动,开关变为开通状态。开关处于开通状态时,直流电源电压施加到集电极/ 漏极,电流的流向:上臂晶体管/MOSFET →电机线圈(2 相串联)→下臂晶体管/MOSFET →地。
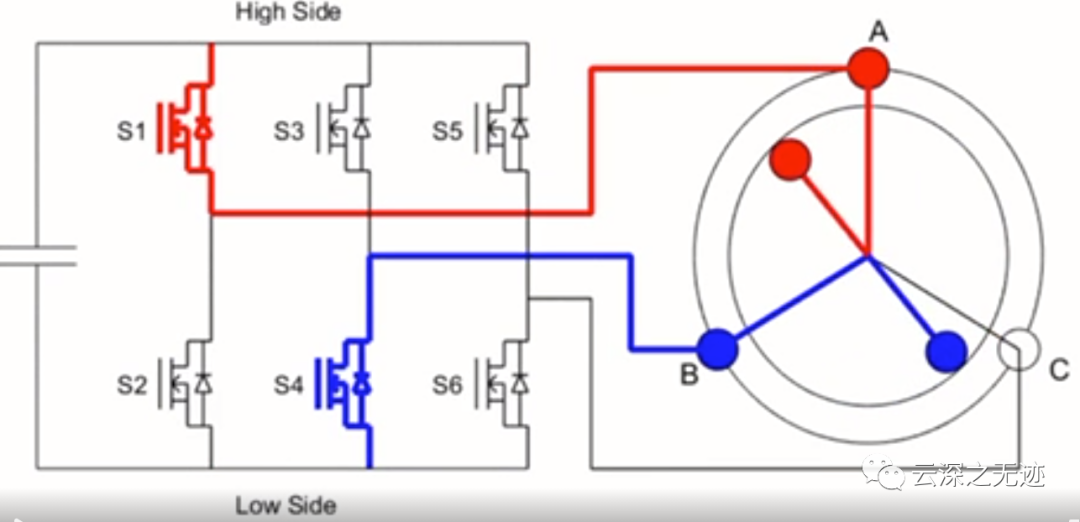
有U相、V相、W相线圈。PWM 信号必须控制电流按如下方向流过其中2相的开关。
U → V,U → W,V → W
箭头左侧对应上臂开关,箭头右侧对应下臂开关。电路中,U相、V 相、W 相线圈可以分别视为只有1个。当然,实际上并不是每相只有1个线圈,而是由数个定子线圈(槽)串联或并联起来。关于开关器件,上臂和下臂分别设置了U 相、V相、W 相。接下来,我们来看看3 相中的各相开关器件。U相上臂开关器件开通时,U 相下臂开关器件必须关断;U 相上臂开关器件关断时,U 相下臂开关器件必须开通。V 相、W 相也是如此。绝不会出现上臂和下臂同时开通/ 同时关断的情况。这样的关系叫做“互补”
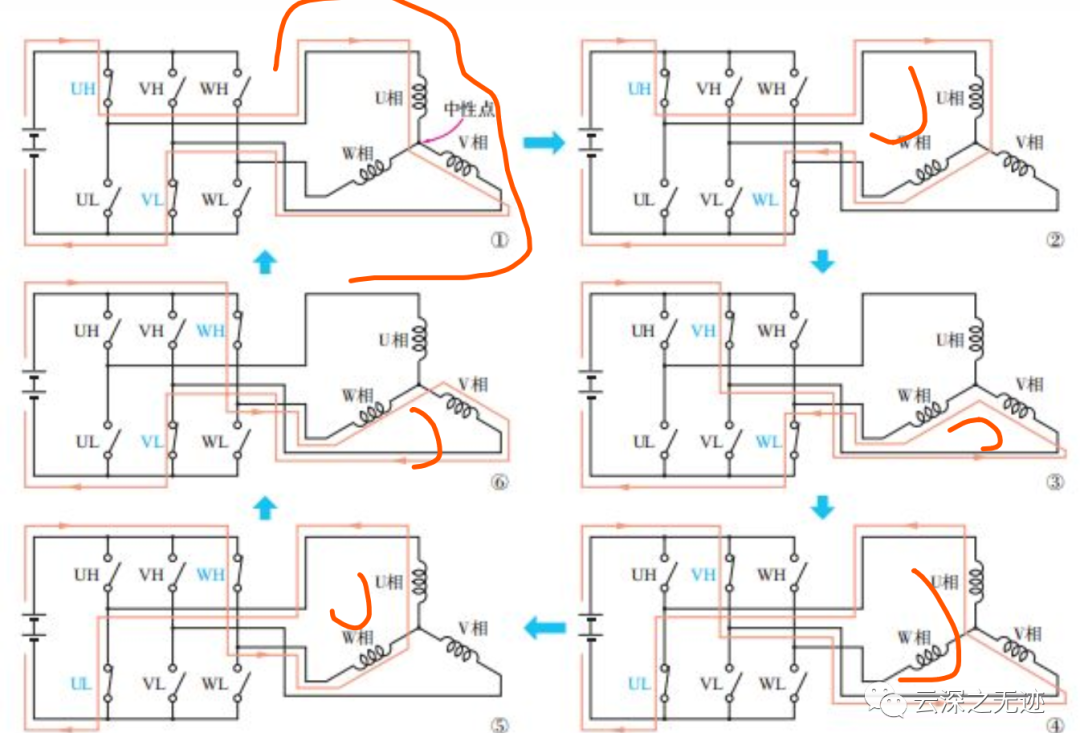
就是我们把MOS管竖起来看,如果一套MOS管参与这个变相,那么它的状态上下相之间一定是互补的,不会出现都开都关的情况。
齐全了
反向电动势测量 测试方法:电机不接电调,三相线分别接示波器三个探头正极,三相线上分别接一个小电阻,然后将三个电阻另一端短接送入探头负极,如下图所示。
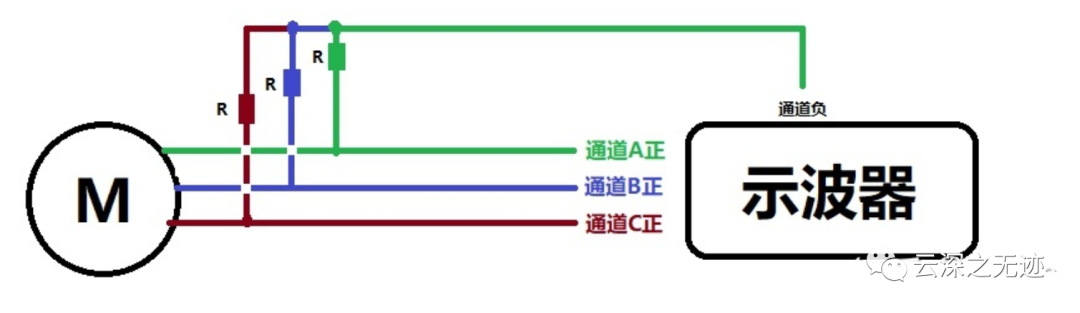
接线的方式
目前有的一些电机
那这所谓的云台电机和普通的航模电机有什么区别?其实直接找答案,找不到,我这里整理一下。
云台电机速度不是很快,扭矩较大,kv值很低,一般几十kv(这个有点保守了)云台的电机里面使用的是参杂稀土的强磁,一般功率也不大,静音,低功耗,适合长时间运转。
普通航模都是2k多的KV值,负载电流高,而且功率也大,你看图片就知道,线材较粗。高速旋转时,动平衡也是需要关注的点,一般卖家会宣传这些点。
审核编辑:刘清
-
超级拆解:奇瑞A3完全拆解揭秘秀2012-04-18 56213
-
A3 电源原理与维修2009-08-18 4195
-
BLDC电机入门——(1) 何谓BLDC电机2018-06-06 12391
-
HP 8753C A3 SOURCE问题2018-10-10 1359
-
BLDC控制软件的过程2021-08-17 1237
-
金星彩电通病良方-A3机芯2006-04-17 2574
-
长虹A3机心彩电开关电源电路2009-01-21 2010
-
A3机芯开关电源电路分析与检修2013-09-06 1956
-
全方面解读进口奥迪A3底盘2018-06-29 14325
-
关于中国移动A3的介绍和应用2019-10-31 4391
-
什么是BLDC电机?BLDC电机是如何旋转的?2020-02-05 26051
-
无刷电机驱动器资料BLDC-5015A2021-09-18 2542
-
立体封装模块加固建议a32022-06-10 565
-
bldc电机是变频电机吗 bldc的控制方式2023-08-15 7041
-
A3电源电路图2024-08-27 2025
全部0条评论

快来发表一下你的评论吧 !
