

基于SVM改进的异步电机直接转矩控制系统设计
工业控制
描述
导读:本期对基于SVM改进型的异步电机直接转矩控制算法进行梳理,有两电平SVM和三电平SVM。
一、传统直接转矩控制存在问题的分析
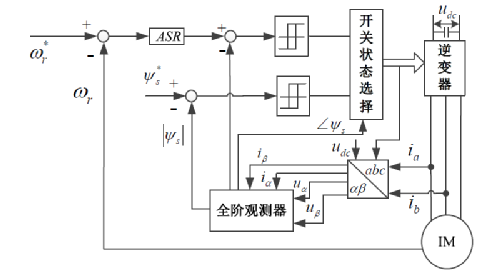
图1异步电机直接转矩控制系统仿真
直接转矩控制在两相静止坐标系下分析异步电动机的数学模型,控制电动机的磁链和转矩,它所需要的信号处理工作特别简单,所用的控制信号使观察者对于异步电动机的物理过程能够做出直接和明确的判断;控制磁场定向所用到的是定子磁链,只要知道定子电阻就可以观测出来,大大减少了矢量控制技术中控制性能易受电动机参数变化影响的问题;采用空间矢量的概念来分析异步电动机的数学模型和控制其各物理量, 使问题变得特别简单明了; 强调转矩的直接控制效果,从控制转矩的角度出发,采用离散的电压空间矢量和六变形磁链轨迹或近似圆形磁链轨迹的概念;对转矩直接控制,其控制方式是:通过转矩两点式调节器把转矩检测值与转矩给定值做滞环的比较,把转矩波动限制在一定的容差范围内,因此它的控制效果不取决于异步电动机的数学模型是否能够简化,而是取决于转矩的实际状况。
综上所述,直接转矩控制采用空间矢量的分析方法,在两相静止坐标系下计算与控制异步电动机的转矩和磁链, 采用定子磁场定向,借助于离散的两点式调节产生PWM信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。它省掉了复杂的矢量变换与异步电动机动态数学模型的简化处理,没有通常的PWM信号发生器。它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确,控制系统的转矩相应迅速, 是一 种具有高静、动态性能的交流调速方法。
尽管直接转矩控制具有上述一些优点, 但是直接转矩控制的两个最主要 的缺点却大大限制了其在交流调速中的广泛应用。 电磁转矩脉动过大和逆变 器开关频率不恒定是直接转矩控制的两个最主要的缺点。
1.1电磁转矩脉动过大电磁转矩脉动过大产生的原因如下:
(l)、 在异步电动机直接转矩控制系统中,根据电压开关矢量表,在逆变器的整个开关周期内, 只有一个电压空间矢量作用于异步电动机。由于所选择的电压空间矢量一直作用于异步电动机,定子电流、电磁转矩等物理量始终沿着一个方向变化。在转矩差较大的情况下,所选择的电压空间矢量使转矩在一个开关周期的较长时间内才可能达到参考值;但是在转矩差较小的情况下, 所选择的电压空间矢量使转矩在一个开关周期的较短时间内就可以达到参考值, 而余下的时间因未发生逆变器开关状态的变化,所选择的电压空间矢量继续作用于异步电动机,故转矩继续沿原来的趋势变化,从而产生较大的电磁转矩脉动。
(2)、由于受到电力电子开关器件所能承受的开关频率的限制,在电机运行在高速状态时,转矩滞环控制器所设定的滞环带宽不能太小,如果太小将会产生很大的逆变器开关损耗。这样, 当电机运行在低速状态时,滞环带宽相对变大,也造成了较大的转矩脉动。
1.2逆变器开关频率不恒定
逆变器的开关时刻是山转矩滞环控制器的上下边界决定的,在直接转矩控制中,转矩上升和下降的斜率与很多因素有关,不是一个常值。例如,定子磁链所在的扇区不同,即便选择相同的电压空间矢量,而转矩变化的斜率也是不同的。因此逆变器的开关频率是不固定的。
二、基于SVM改进的异步电机直接转矩控制
DTC 存在转矩纹波大,开关频率不固定等缺点。不少学者对这一问题进行了分析并提出了相应的解决办法。其中应用较为广泛的方法是将 SVM 引入 DTC。由于 SVM 能在调制范围内综合出任意幅值和相位的参考电压,因而相比只有有限个电压矢量的开关表具有更精细的调节能力。采用 SVM 后采样频率无需太高即可获得较为优异的控制性能而且原DTC开关频率变化的问题亦随之解决。对于这类方法来说,问题的关键在于如何获得参考电压。可能的方法有无差拍控制,滑模控制器,定子磁场定向等。虽然引入 SVM 后能提升 DTC 的稳态性能,但是大多数情况下系统变得更为复杂而且对参数依赖性更强。
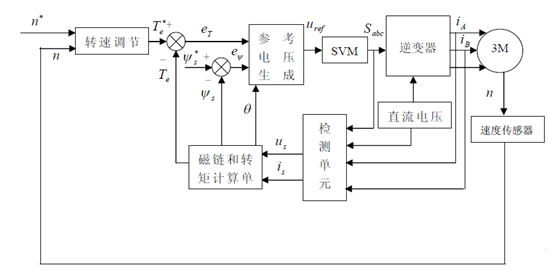
图2 基于SVM改进的异步电机直接转矩控制系统框图
在改进后的控制系统中,将滞环比较器替换为控制性能更为卓越的PI 控制器,SVPWM 模块可以根据磁链和转矩偏差的大小和方向,实时精确的调制出任意的改变磁链和转矩所需的电压空间矢量,实现磁链的平滑调节,而不受开关表中空间电压矢量数量的限制。该方案能使逆变器开关频率恒定,从而可以大大降低转矩、磁链的脉动。
该系统采用的是一种先进的脉宽调制策略,将逆变器和异步电机看做一个整体来控制,控制系统具有直流电压利用率高、算法简单、谐波损耗及噪声低等特点,将先进的控制理应用到直接转矩控制系统中,大大提高了系统的性能。
2.1 SVPWM
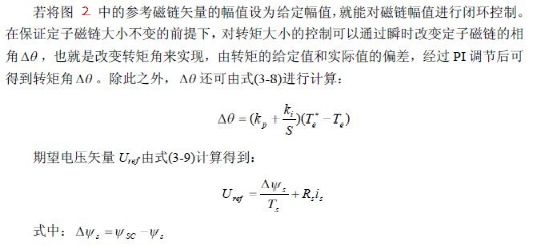
(1) 期望电压ref U 的生成
下一个周期所需期望电压矢量的生成需要让定子磁链和电磁转矩在上一个周期内都能跟踪期望值,从而利用其与期望值的偏差控制下一个周期内定子磁链和电磁转矩的大小。
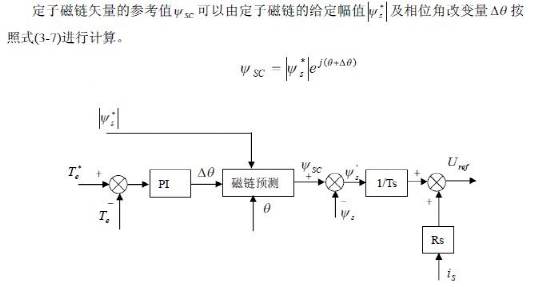
图3 期望电压矢量的生成
(2) 两电平SVM/三电平SVM
两电平SVM/三电平SVM的输入都是参考电压,输出的是参考电压对应的逆变器的6个脉冲。两电平SVM和三电平SVM在之前的文章有过介绍,本期直接把两电平/三电平SVM模块移植过来进行使用。
(3) 仿真模型搭建(采样率10K)
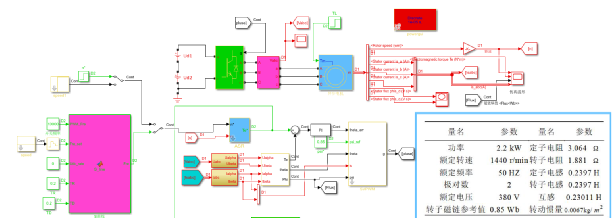
图4 基于SVM改进的异步电机直接转矩控制系统仿真
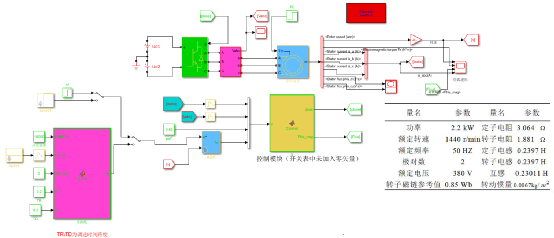
图5传统异步电机直接转矩控制系统仿真
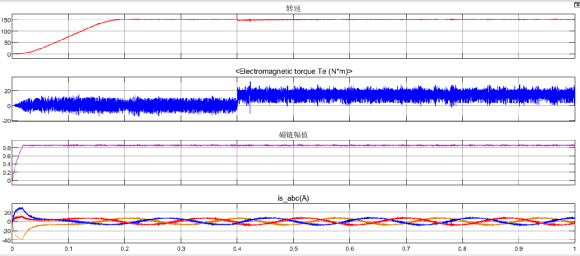
图6传统异步电机直接转矩控制系统仿真波形变化情况
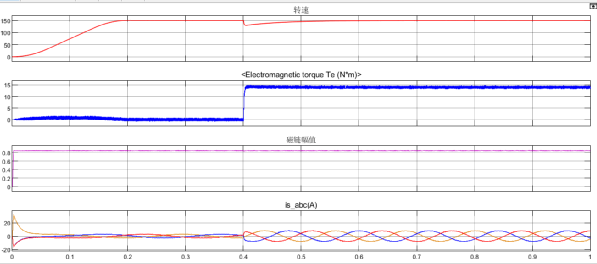
图7 基于SVM改进的异步电机直接转矩控制系统仿真波形变化情况
从图6和图7对比发现,基于SVM改进的异步电机直接转矩控制的转矩脉动明显减小,且定子磁链的容差也减小很多。
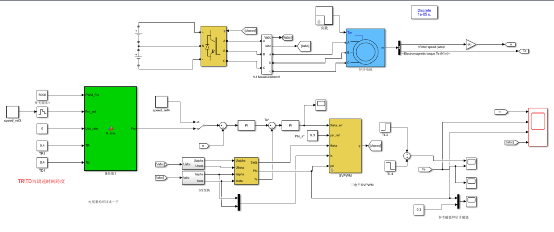
图8 基于三电平SVM改进的异步电机直接转矩控制系统仿真
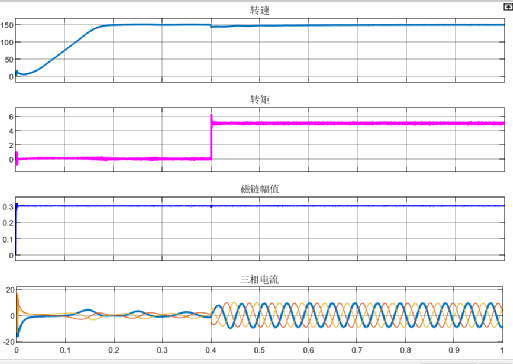
图9 基于三电平SVM改进的异步电机直接转矩控制系统仿真波形变化情况
三、总结
3.1 两电平DTC仿真结果分析
突加负载后转矩不能快速响应且转矩脉动较大,不能精确控制在较小范围内,即使在稳态时也有周期性的转矩波动;定子三相电流谐波分量较大,会使电机发热严重,开关损耗大,从而减小了系统的输出功率,降低控制系统的效率;磁链畸变较严重,轨迹偏离标准圆,磁链跨越扇区分界时还会造成磁链跳变,尤其电机启动时变化幅度大,不能平滑线性递增,启动后脉动严重;电机启动时转速不能立即响应,升速较慢,且超调较大,达到给定后不能保持为恒定,在0.4秒时突加负载时会使转速突变,抗扰性较弱。
3.2 三电平DTC仿真结果分析
改进后的控制系统在突加负载后转矩能快速响应,在启动时也能快速建立。定子磁链几乎能平滑变化,更加接近标准圆,磁链跨越扇区边界时不再有畸变现象,整体脉动幅度大大降低;电机转速响应快速准确,接近理想情况,启动时迅速上升,超调极小,稳定后能保持完全恒定,精度高,特别显著的是在应对突加负载时有相当强的抗扰性和自适性,而且几乎不产生速度降落,产生的微小速降变化快速,将很大程度地减小速度变化对负载造成的不良影响。定子三相电流更加接近标准正弦波,谐波分量小,体现了开关频率的相对稳定,因此开关管损耗和电机发热问题会得到有效解决,系统效率将应之提高。
审核编辑:汤梓红
-
异步电机直接转矩控制simulink仿真2023-03-29 914
-
异步电机直接转矩控制simulink仿真教程2021-09-06 1698
-
应用DSP的异步电机直接转矩控制系统2020-09-24 2209
-
异步电机无速度传感器直接转矩控制系统2017-01-21 1388
-
异步电机无速度传感器直接转矩控制系统研究2016-05-04 850
-
基于模糊控制器的异步电机直接转矩控制2011-11-14 1652
-
异步电机直接转矩弱磁控制研究2011-06-13 1329
-
异步电机直接转矩控制系统的Matlab仿真2009-11-18 1260
-
基于DSP的新型异步电机直接转矩控制系统2009-10-15 622
全部0条评论

快来发表一下你的评论吧 !
