

国产AI芯片如何助力车路协同突破落地瓶颈?
人工智能
描述
近年来,车路协同在智慧高速等交通数字化领域进行了诸多探索和应用,同时车路协同也是补足单车智能迈向自动驾驶的重要产业链条,国家的“十四五”规划中也强调了车路协同的重要意义。
为什么要发展车路协同?车路协同包含哪些核心组成部分?国产AI芯片如何助力车路协同突破落地瓶颈?
让聪明的车,驶上智慧的路
为什么需要发展车路协同?车路协同是支撑交通强国目标达成的关键措施,2019年国务院发布的《交通强国纲要》,明确了从交通大国到交通强国的总体目标,目标是降低万车死亡率,降低物流成本GDP占比,提升交通人口覆盖率,构建先进的交通设施。各部委正从国家战略层面推动车路协同产业发展。
什么是车路协同?总体来看是五个方面:智慧的路、实时的云、聪明的车、可靠的网、精确的图。
智慧的路,通过全息感知,形成交通状况的全面感知结果,通过可靠的网下发给聪明的车和实时的云,同时更新精准的地图,提供车路协同的服务,为聪明的车提供了感知和决策支撑,实现了车路云网图的联合适配。
业界有几个典型的应用场景,包括红绿灯信息推送,行人、车辆防碰撞提醒,也包括了全天候出行,高速5G超视距透视、超视距事故、拥堵预警,特定试验区道路无人驾驶。
车路协同的核心技术包括路侧边缘设备、多元算力接入、基础感知任务、算法类型。

路侧边缘设备包括摄像头、激光雷达、毫米波雷达、路侧计算单元等。
多元算力接入需要更多的传感器、更大数据的接入、更多的目标,典型的车路协同场景边缘计算包括8个摄像头、8个毫米波雷达、2个激光雷达等等。
基础感知任务包括车辆及行人检测和追踪、场景的识别和分割,典型算法有CV类检测、分类、跟踪和点云处理,融合算法包括多传感器融合。
车路协同边缘计算挑战:
高性能、低时延、精准
车路协同边缘计算行业的挑战,一是多元化算力性能要求高,3D点云数据处理性能开销非常大;二是需要超低时延,业界内端到端时延要求小于100毫秒,因此需要边缘计算芯片实时分析和管控;同时需要做非常精准的计算。

典型车路协同边缘计算需要处理激光雷达点云数据,得益于瀚博SV100芯片优异的架构设计,点云数据处理性能是主流GPU的2倍,同时也需要处理CV类图像,以CV类图像处理为例,下图左边是英伟达主流云端70W推理GPU T4的延迟,差不多是5000帧、35毫秒。
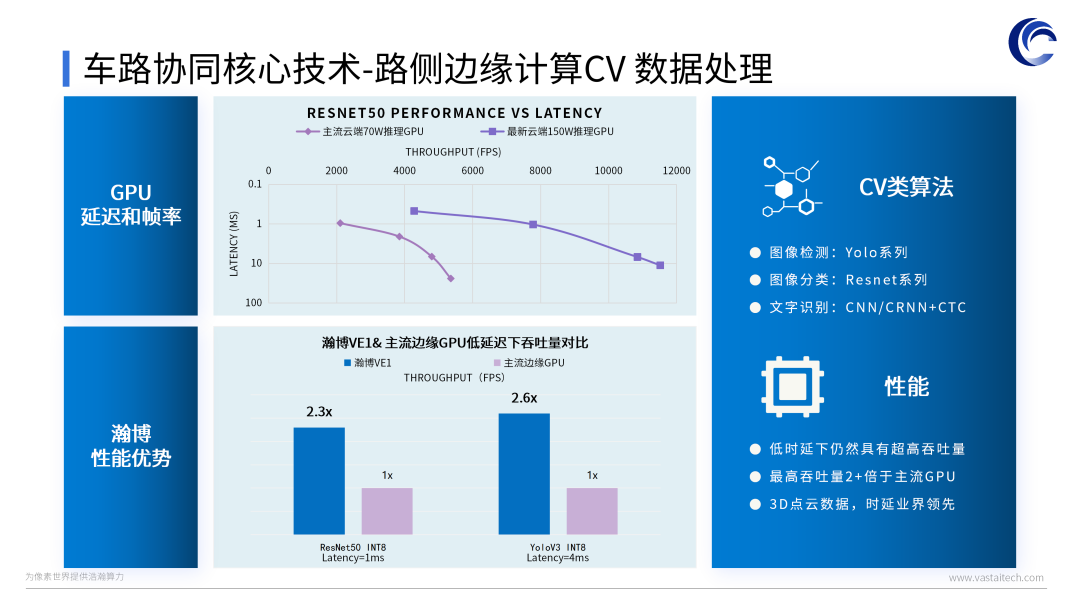
GPU是不是可以做更低的延迟呢?它也可以,你可以看到左边的图,在1毫秒的时候差不多是2000帧,GPU有一个痛点是延迟往下降的时候,吞吐量也就大大往下降了,所以GPU本身并不是为超低延迟设计的。
瀚博半导体在去年推出了云端的芯片,今年在世界人工智能大会也推出了边缘端的芯片SV100,瀚博基于SV100推出了边缘板卡VE1,VE1对比英伟达主流边缘GPU的性能,在两个车路协同网络,ResNet50和YoloV3,各自对英伟达主流最新的边缘GPU有2.3倍和2.6倍的性能优势,同时延迟也低了很多。
为边缘而生的AI推理加速卡
车路协同点云的计算非常耗时,以处理点云数据为例,业界点云数据处理占整个处理时长的40%左右,提高点云处理性能是车路系统降低时延关键点,瀚博SV100芯片处理点云数据性能是业界主流GPU的2倍以上。
瀚博为车路协同打造的边缘AI推理加速卡,有超大的算力和超低的延迟,100TOPS INT8峰值算力,为边缘推理提供强大支持;同时有超强解码能力,60路以上的1080P高清解码;还有超低功耗,40到60W;为边缘而生,主动散热和被动散热的设计,可以胜任边缘计算复杂场景;支持INT8、FP16、BF16等精度,优化支持CNN、RNN/LSTM、Transformer和MLP等多种神经网络;支持100多种算子;瀚博平台广泛支持主流图像、激光雷达的检测、跟踪、分割、分类等算法和算子。

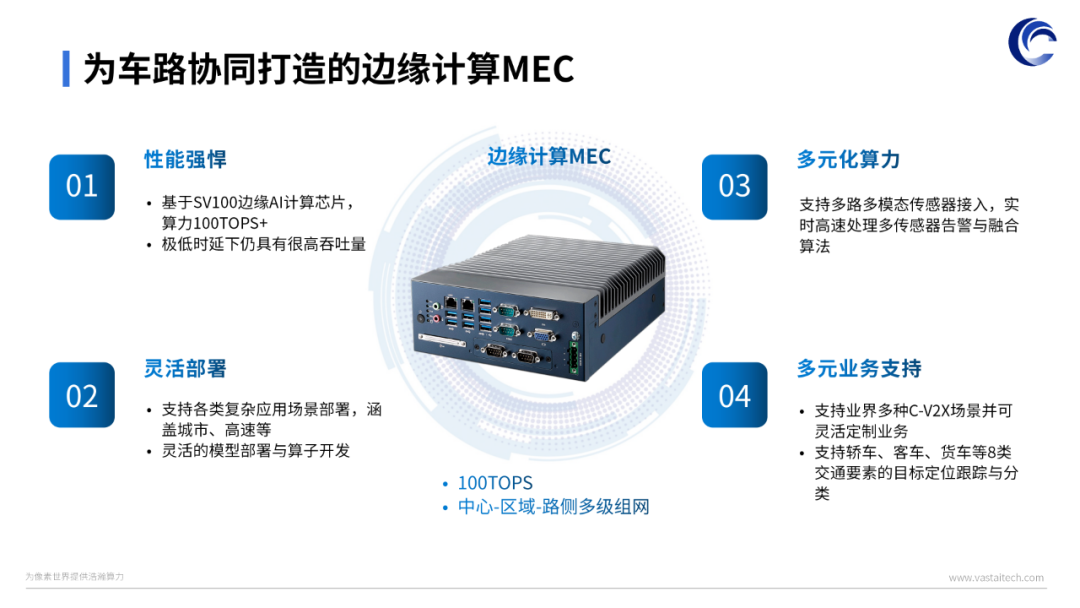
瀚博为车路协同打造了边缘计算MEC,这个MEC性能非常强悍,有多元化算力支持,像激光雷达、毫米波雷达、图像摄像头输入,有灵活部署,100TOPS,可以用在中心-区域-路侧等多级网络。
瀚博一直致力于车路协同场景,这是广州三元里落地的项目,我们正在和客户一起用MEC做态势全息感知、视频立体监控、车辆高效导流、车辆自动检测和跟踪。广州国际生物岛智能网联基地项目,也是用瀚博MEC做到了红绿灯信号下发、道路施工预警、弱势行人保护、鬼探头、盲区显示、拥堵预警等等。

瀚博云端芯片SV102和边缘端芯片SV100已经量产,为云边AI推理和计算提供超高性能和超低延迟的算力。
编辑:黄飞
-
千方科技与鸿泉物联合作助力车路云一体化加速落地2024-06-26 2797
-
NVIDIA DRIVE Thor超级芯片助力车企打造安全可靠的自动驾驶汽车2022-09-26 2017
-
基于车路协同的群体智能协同解析2020-12-30 2628
-
首颗国产车规级AI芯片即将量产 国产汽车芯片即将迎来一大突破2020-03-09 3408
-
网络助力车与路——中兴通讯车联网方案2019-07-17 5936
-
买助力车电池当心返厂货2010-01-14 902
-
什么是电动助力车?电动助力车国家标准及内容2009-11-06 7982
-
电动助力车蓄电池2009-11-05 706
-
德曼高能电动助力车电池2009-10-29 762
-
电动助力车充电器电路图2009-05-29 3700
全部0条评论

快来发表一下你的评论吧 !
