

触觉压力传感器压力测量方式 两个测量电气的基本特性
电子说
描述
触觉传感涉及测量两个表面之间直接物理接触区域的力和压力分布。然而,虽然可以使用常见的力和压力测量方法,但所应用的机制通常要复杂得多。
压力是一个标量值,定义为特定区域上的力。可以将力视为具有特定大小和方向的矢量。传统的单轴力测量设备,例如称重传感器,可以结合精密弯曲以将接触聚焦到单个、控制良好的点,在该点可以隔离和测量三个方向分量中的一个或多个。
然而,当考虑薄而灵活的触觉压力传感器时,试图捕捉的是两个表面之间的相互作用,因此这些复杂的测量必须在表面相互作用边界进行,同时尽量减少传感器本身对传感器的影响和侵入。块。应用。这意味着准确设计、校准和验证触觉传感器的性能是一项具有挑战性的工作,需要仔细考虑。本文档旨在作为指南,以更好地了解影响校准的参数以及过程和最终结果本身。
触觉感应技术
当前所有的商业触觉传感方式通常都基于测量两个基本电气特性之一:电阻或电容。
PPS传感器技术的开发始于1990年代初的哈佛机器人实验室,其目标是使机器人具有“触觉”。该技术专注于基于电容的触觉压力测量,其中由绝缘电介质隔开的两个不同的金属导体形成一个电容器。
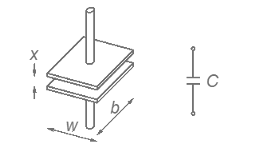
以法拉(F)为单位测量的简单平面电容器的电容(C)由公式1给出:
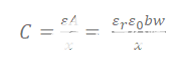
·导体板宽度(w)(mm)
·导体板深度(b)(mm)
·板面积(A)(mm2)
·平行板间位移(x)(mm)
·介电常数(e)(F m–1)
·自由空间的介电常数(e0)(8.85´10–12 F m–1)
·相对介电常数(eR)(无量纲)
一个或两个导体板上的力会导致平行板之间的位移(x)发生变化,从而导致电容发生变化,这可以通过电学测量和量化,从而允许从该值推断输入压力。这些板的偏转(通常为50毫米量级)导致非常高的灵敏度、可重复性和随时间推移的稳定性。
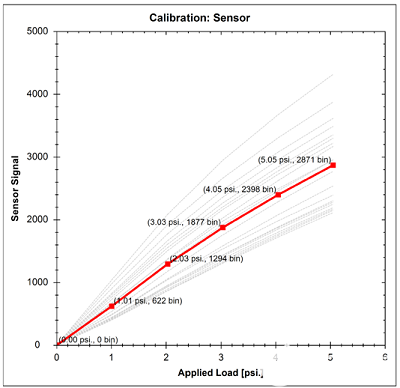
由于变化的传感器参数实际上是板之间的位移(x),因此由于参数在公式1的分母中的位置,电容相对于该位移的变化是非线性的。
因此,典型的未校准PPS触觉传感器将具有固有非线性的响应曲线,在低压下具有较高的灵敏度,而在较高压力下具有较低的灵敏度。这种非线性特性具有双重优势,即在低压下具有良好的灵敏度,同时允许更高的满量程范围。
由于测量电容比测量电阻变化更困难,电容传感器历来更加复杂和昂贵,同时还具有较低的扫描速率。
值得注意的是,PPS已经研究和开发了许多具有不同相对介电常数的专有介电间隔材料,以在低压和高压之间实现最佳灵敏度和机械压力测量性能。
审核编辑:汤梓红
-
无线压力传感器的测量范围如何拓展?2024-12-14 1331
-
压力传感器分类、原理及型号大全2024-06-19 8548
-
压力传感器2021-12-24 13616
-
压力传感器常见的三种测量方式2021-02-14 9939
-
怎样优化压力传感器的使用效率2020-12-16 4791
-
压力传感器的选择与应用2018-11-13 2655
-
常见压力传感器工业原理汇总2018-11-08 2551
-
压力传感器应用实例详解2018-11-07 4316
-
压力传感器原理_压力传感器OFweek Mall怎么用2018-06-20 1552
-
压力传感器测试方法_压力传感器的测量原理_压力传感器种类2018-01-22 36225
-
压力传感器的八种测量方法2017-01-22 9184
-
常见压力传感器应用原理2016-04-27 4015
-
绝压真空压力传感器,气体压力传感器2014-05-07 5631
-
压力传感器特性实验2009-03-06 24313
全部0条评论

快来发表一下你的评论吧 !
