

直角坐标飞拍系统的相机视觉定位系统原理解析
工业控制
描述
随着3C产业的迅速发展,视觉技术广泛应用于取料、贴装、放料等重复性高、精度高的工艺场合中。传统的视觉检测多采用定拍方式,但这种拍照模式生产效率较低,无法满足高速度的检测项目要求。因此,具有高精度高速度的视觉飞拍技术应运而生。
项 目 概 述
信捷推出的直角坐标飞拍系统,将视觉系统、运控系统与信息化系统相结合,实现了多任务的负载整合。让工件从抓取到拍照、放料( 或组装 ) 等一系列动作可在设备不停止的情况下连续执行,并将各智能设备连接到云端服务器上,进行信息的收集、处理和决策。
该系统不仅缩短了单个产品周期,满足了效率,还能保证运行精度,做到最优控制。目前飞拍技术已广泛应用于锂电、手机、食品等行业。
原 理
直角坐标飞拍系统由上下相机视觉定位系统、取放料执行机构、载盘移动机构、信息化系统组成。
视觉系统主要由上相机(2000万分辨率)、下相机(200 万分辨率)、光源等组成,取放料部分由伺服、步进及电磁阀构成的双吸嘴执行。
上相机对提前示教得出的取料待机位拍照取图后,由工控机进行算法处理,将位置信息发送至伺服和步进系统,驱动吸嘴取料。
取料后,吸嘴运行至下相机固定拍照点时进行抓拍,并在移动至载盘过程中使用定位算法补偿给出放料位置。整个过程运动机构无需停止,即可完成飞行抓拍功能。
信息化系统配合控制器、通讯模块实现设备数据采集和上云管理,完成设备资产管理、数据监控、运营维护以及各种数据分析等业务。

优 势
通过X86负载整合控制器、视觉处理平台、Codesys编程等产品和技术,提高了高速移动中拍照位置的准确性以及图像读取和处理的速度,减少了因拍摄确认造成的设备停顿问题,促进了设备工艺的升级。该系统搭配5G云端应用,实现了现场生产数据的采集、存储、分析,助力打造行业Top竞争力。
设 备 简 介
图像处理高速高精度
· 速度快,物体运行速度可达2m/s
· 拍照快,30-40µs内完成拍照
· 运算快,30ms内结果输出
· 定位准,精度15µm以内
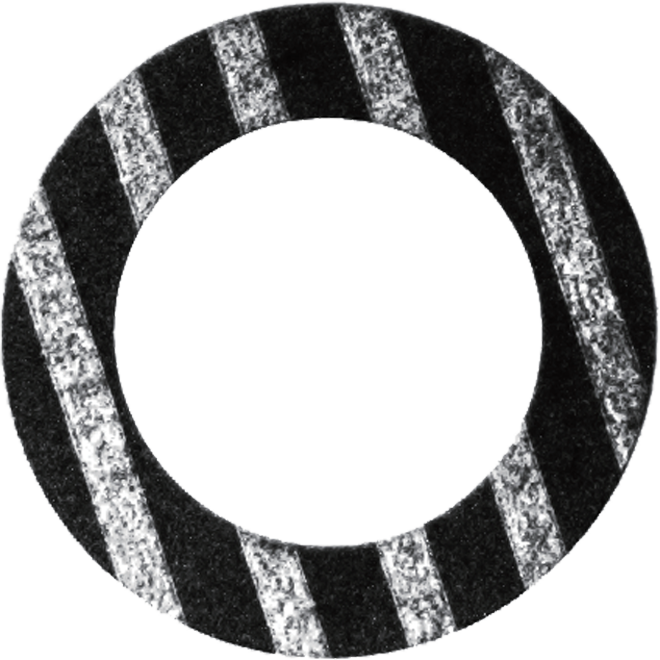
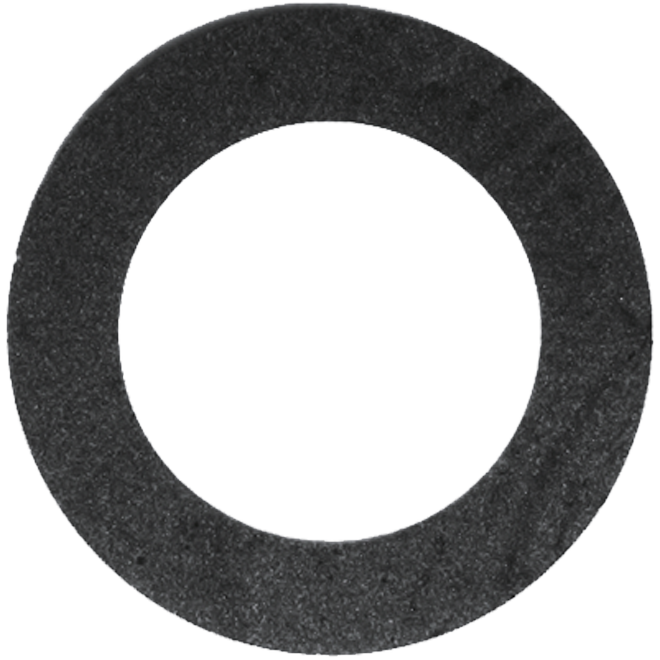
工件原图
视觉标定算法体系完善
上相机通过轮廓定位算法、区域分析算法可实现叠料、正反、瑕疵的检测,并进行粗定位。下相机通过标定定位算法对物体的实际位置进行二次修正,将像素坐标转化为机械坐标,标定误差小,精度高。
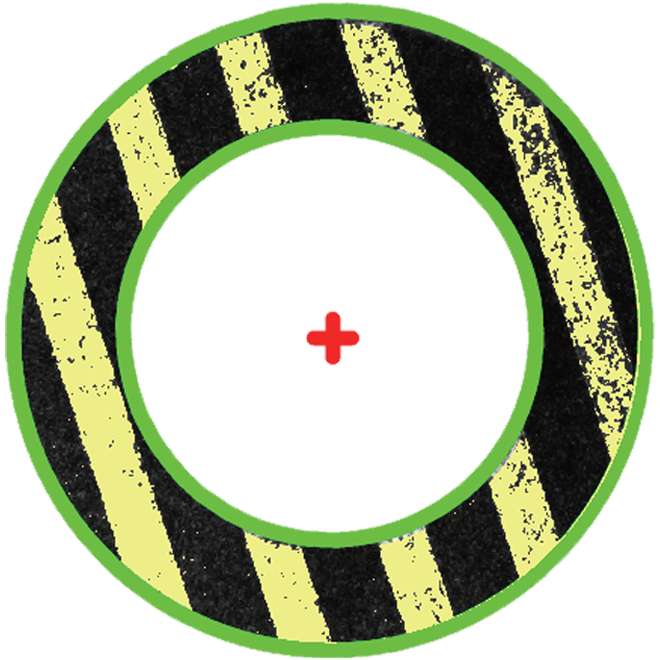
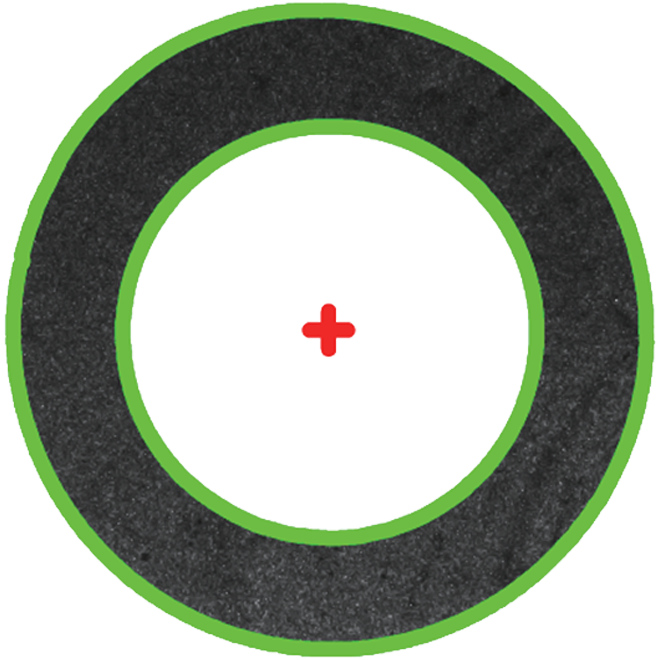
定位检测效果
运 控 系 统
采用Codesys编程,较传统的板卡控制方式,集成性广,稳定性高,上云方便。
· 开放式控制系统支持各类CPU平台及各类操作系统;
· 支持丰富的主流总线协议及物联网通信协议;
· 强大的运动控制算法库,性能更稳定;
· 支持本地可视化、网页可视化、HMI等多种可视化解决方案,连接云方便。
编辑:黄飞
-
直角坐标机器人在精密制造中可以执行哪些任务?2024-12-04 1265
-
智造之眼丨飞拍联合定位贴合2023-06-12 2518
-
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述2022-11-23 4654
-
直角坐标机器人&关节机器人的区别详解2022-11-02 3950
-
直角坐标机器人&关节机器人的区别详解2022-10-27 2893
-
直角坐标机器人的结构组成及在铝锭搬运中的应用2019-06-24 4680
-
电机控制系统中直角坐标系与极坐标系的优势比较,请问TI是否有现成的demo例程?2018-06-11 3092
-
直角坐标机器人的定义及主要特点2017-10-12 4278
-
直角坐标机器人和关节机器人的特性及应用对比2017-10-09 6360
-
大族电机-直角坐标机器人2016-12-25 931
-
求问labview中极坐标与直角坐标之间的转换解答2012-05-21 5114
-
无线电探向用的极坐标直角坐标转换器和测试图案发生器2009-09-23 1037
-
德国BAHR直角坐标机器人在无损探伤设备的应用2009-04-09 1431
全部0条评论

快来发表一下你的评论吧 !
