

加速度计和陀螺仪的测量范围、测量精度及单位换算方法
电子说
描述
01 说在前面的话
1. 有不少朋友在做项目的时候经常涉及到加速度计和陀螺仪的原始数据转换为其他的单位的问题,这篇文章梳理和推导一下。
1)加速度计的原始数据 在应用时常见的转换单位有: g、m/s^2 、角度
2)陀螺仪的原始数据 在应用时常见的转换单位有:°/s、red/s、角度
2. 是对 《几种常用的加速传感参数比较》 这篇文件更新,在这篇文章中将不同参加的传感器参数对比和精度参数写在一起,本文专讲精度参数和单位换算
02 测量范围和精度
在MEMS 传感的数据手册中都给出了加速度计和陀螺仪的测量范围和测量精度。有测量范围是可以推算出测量精度的。
不论是加速还是陀螺仪,数据寄存器都是16位的,由于最高位是符号位,故而数据寄存器的输出范围是 -7FFF~7FFF (-32767~32767)。
陀螺仪:
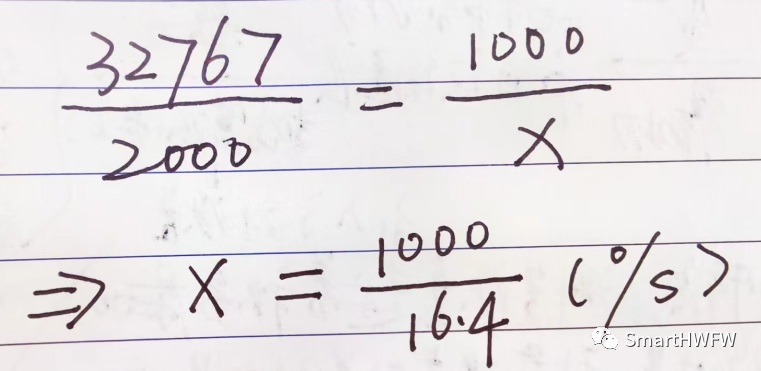
假如,我们选择陀螺仪的测量范围是 ±2000,在数据手册中 16.4 LSB/(°/s)是 32767/2000 = 16.4 计算出来的
那么寄存器的数字和测量范围的对应关系:
| -32767 | 32767 |
| -2000(°/s) | 2000(°/s) |
比如,通过寄存器读取陀螺仪的值是1000的,那么我们求角速度 X
加速度:
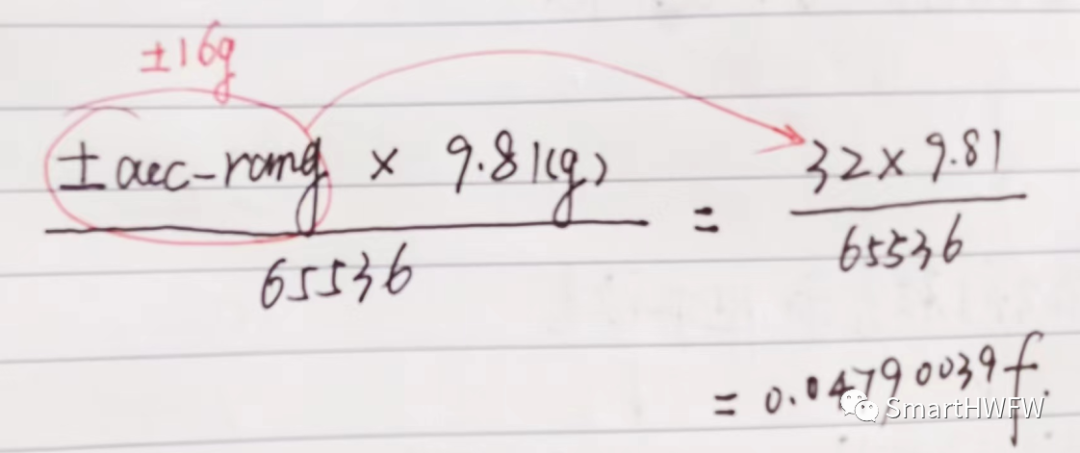
同样假如,我们选择加速度的测量范围是 ±16,在数据手册中 2048 LSB/g 是 32767/16 = 2048 计算出来的
那么寄存器的数字和测量范围的对应关系:
| -32767 | 32767 |
| -16g | 16g |
比如,通过寄存器读取陀螺仪的值是1000的,那么我们求重力加速度 X X = 1000 / 2048 = 0.49g
03 单位换算
1. 不同量程下精度的计算
加速度计量程为:±2g
获取到的加速度计数据 除以16384
加速度计量程为:±4g
获取到的加速度计数据 除以8192
加速度计量程为:±8g
获取到的加速度计数据 除以4096
加速度计量程为:±16g
获取到的加速度计数据 除以2048
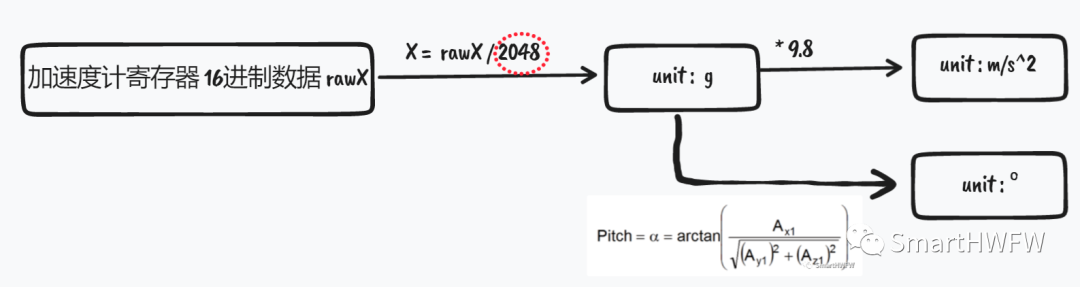
2.可以转化为带物理单位的数据,单位:g(m/s^2)
3. 可以通过三角关系转换为角度
float tanalpha = 0,tanbeta = 0,tangamma = 0; tanalpha = (float)data->rawx / sqrt( ((float)data->rawy * (float)data->rawy + (float)data->rawz * (float)data->rawz) ); data->anglex = (float)atan(tanalpha)*57.3; tanbeta = (float)data->rawy / sqrt( ((float)data->rawx * (float)data->rawx + (float)data->rawz * (float)data->rawz) ); data->angley = (float)atan(tanbeta)*57.3; tangamma = (float)data->rawz / sqrt( ((float)data->rawy * (float)data->rawy + (float)data->rawx * (float)data->rawx) ); data->anglez = (float)atan(tangamma)*57.3;
1. 不同量程下精度的计算
陀螺仪量程为:±250 dps
获取到的陀螺仪数据除以131
陀螺仪量程为:±500 dps
获取到的陀螺仪数据除以65.5
陀螺仪量程为:±1000dps
获取到的陀螺仪数据除以32.8
陀螺仪量程为:±2000dps
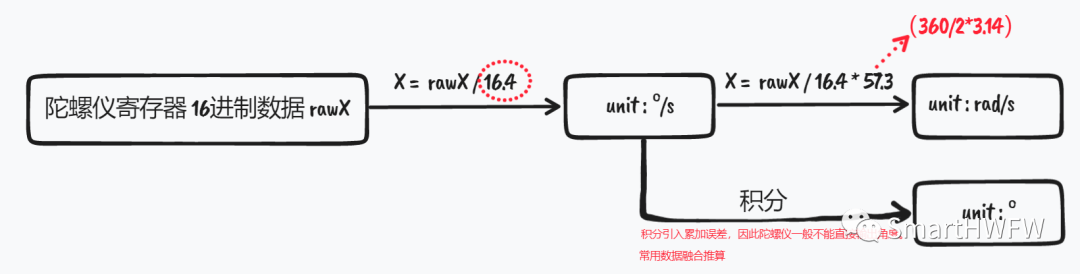
获取到的陀螺仪数据除以16.4
2.可以转化为带物理单位的数据,单位:rad/s
//原始数据 raw_data[AXIS_X] = (buf[0] << 8) | buf[1]; raw_data[AXIS_Y] = (buf[2] << 8) | buf[3]; raw_data[AXIS_Z] = (buf[4] << 8) | buf[5]; //坐标map转换 remap_data[icm_dev.cvt.axis[AXIS_X]] = icm_dev.cvt.sign[AXIS_X] * raw_data[AXIS_X]; remap_data[icm_dev.cvt.axis[AXIS_Y]] = icm_dev.cvt.sign[AXIS_Y] * raw_data[AXIS_Y]; remap_data[icm_dev.cvt.axis[AXIS_Z]] = icm_dev.cvt.sign[AXIS_Z] * raw_data[AXIS_Z]; //重力加速度计算 unit: m/s2 data->x = (float)remap_data[AXIS_X] * KSCALE_ACC_16G_RANGE; data->y = (float)remap_data[AXIS_Y] * KSCALE_ACC_16G_RANGE; data->z = (float)remap_data[AXIS_Z] * KSCALE_ACC_16G_RANGE; //red/s data->x = (float)remap_data[AXIS_X] * KSCALE_GYRO_2000_RANGE; data->y = (float)remap_data[AXIS_Y] * KSCALE_GYRO_2000_RANGE; data->z = (float)remap_data[AXIS_Z] * KSCALE_GYRO_2000_RANGE;
审核编辑:汤梓红
-
初识加速度计与陀螺仪2021-09-28 2402
-
介绍加速度计和陀螺仪的数学模型和基本算法2021-08-06 2562
-
AN-688: iMEMS®加速度计和陀螺仪的相位与频率响应2021-03-21 1738
-
MEMS加速度计和MEMS陀螺仪的区别是什么2020-06-08 2398
-
MEMS加速度计和MEMS陀螺仪的区别2020-04-16 3115
-
基于加速度计的倾角测量精度提高2019-07-18 2838
-
请问为什么陀螺仪需校准而加速度计不需?2019-07-04 5632
-
加速度计和陀螺仪的参数意义2019-06-25 7780
-
加速度计与陀螺仪互补滤波与卡尔曼滤波核心程序2017-01-22 1238
-
加速度计和陀螺仪传感器_原理_检测及应用2016-06-17 1525
-
关于陀螺仪和加速度计的选择问题2015-11-27 12084
-
利用加速度计和陀螺仪测量车辆运动2013-02-02 21360
-
MEMS加速度计和陀螺仪的相位与频率响应2011-11-25 2020
-
基于加速度计的无陀螺惯性导航系统的研究2009-12-02 5887
全部0条评论

快来发表一下你的评论吧 !
