

基于SupSLAM的视觉惯性SLAM方法
描述
近年来,使用机器学习技术进行特征提取的基于调制解调器特征的SLAM越来越受到关注,并有望在几乎所有机器人工作环境中超越传统方法。这种方法利用经过训练的网络来学习关键点,从而增强可视化SLAM数据关联的鲁棒性。现代基于特征的SLAM也有望为实时映射生成可靠的感知图,因为基于学习的特征点更具可重复性和均匀分布性。此外,这些局部特征可以用作神经对应网络的输入,以消除异常值,从而使姿态估计变得更加准确。另一方面,由于资源有限,无人机上的SLAM经常对计算构成限制。在这种情况下,基于特征的SLAM更相关,因为提取的兴趣点可以稍后用于与分割和对象检测相关的任务。
因此,提取特征点的方法在SLAM中起着关键作用。我们引入了一种名为SupSLAM的视觉惯性SLAM方法,该方法基于一种称为超级点的新特征点的使用。这些特征点通过深度神经网络从SLAM前端的输入图像中提取的。我们的SLAM前端只需要一个带有IMU作为输入的立体摄像头。姿态估计由多状态约束卡尔曼滤波器(MSCKF)进行,而轨迹可靠性则由后端运行的图形优化过程维护。
系统架构
图1 中显示了表示我们的SLAM系统的图表。该系统使用立体摄像头作为输入来提取环境特征。该相机配有IMU,用于测量线性加速度和角速度。然后通过前端和后端模块处理来自输入设备的数据。
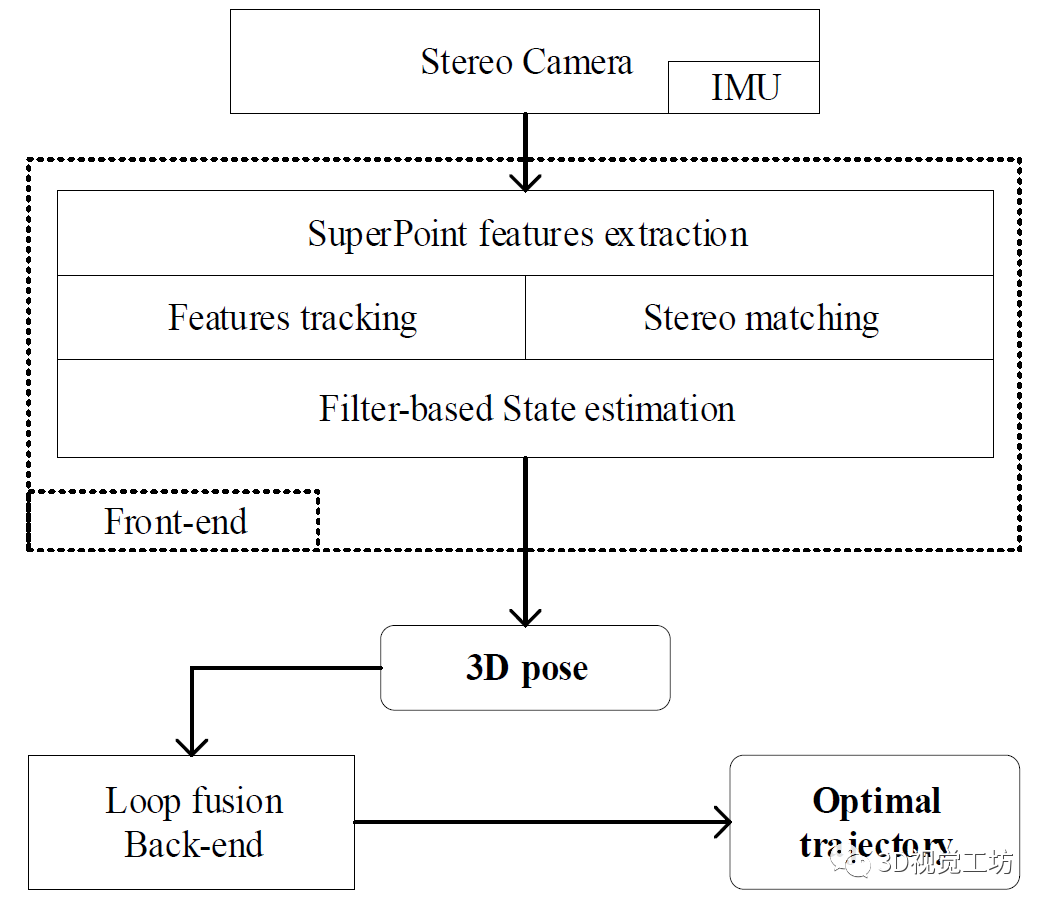
图1系统概述
前端从输入数据中提取特征点,然后在左右摄像头之间匹配它们以获取深度信息。然后将这些信息提供给多态约束MSCKF,以估计无人机的3D姿态。另一方面,后端跟踪关键帧中的要素,以执行映射一致性和轨迹估计的循环闭包过程。因此,前端表现为视觉惯性里程计(VIO),以提供无人机姿势的实时估计,而后端则跟踪并随时间调整姿势。
SLAM 中数据关联的超级点
SuperPoint是一个完全卷积的神经网络,它在单个正向传递和运行中计算2D特征点位置和描述符。在我们的工作中,我们只考虑特征点,以降低计算成本并保持匹配结果的一致性。所用超级点的体系结构如图 2所示。
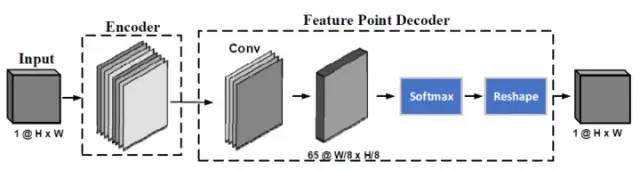
图2超级点的模型架构
实验设置
实验数据是从框架尺寸为40cm x40cm的四轴飞行器中收集的。IMU更新速率为200 Hz。立体相机的基线为7厘米,分辨率为752x480,速度为每秒20帧。SLAM系统在C++中使用OpenVINS框架实现。OpenCV和库用于图像处理。为了实时性能,要跟踪的视觉特征数限制为400个,当活动点数降至300以下时,将添加新的特征点。预训练的深度神经网络用于以752x480的分辨率从输入图像中提取特征。MSCKF中的时间窗口设置为3秒。在后端,每隔1.2米向姿势图添加新的关键帧。
数据准备
真实数据和合成数据都用于实验。真实数据包括EuRoC数据集中名为MH3,MH4和MH5的三个最复杂的序列,其中无人机沿着机房飞行。合成数据包括两个场景,分别代表一个农村农场和一个城市地区,这些场景是由我们从AirSim开发的工具集生成的,如图3所示。

图3用于实验的农村农场和城市地区的综合场景
评价指标
我们使用两个指标进行性能评估,包括绝对轨迹误差(ATE)和相对轨迹误差(RTE)。计算ATE的方法是首先将估计的轨迹与地面实况对齐,然后测量它们之间的差异,如图4a所示。RTE的计算方法是将估计的轨迹划分为段dk然后将每个线段与地面实况轨迹对齐,以计算误差,如图4b所示。
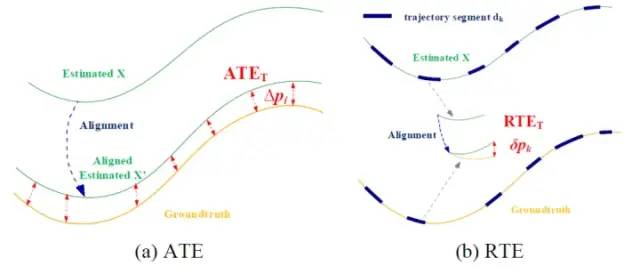
图4评估指标的图示(a) 绝对轨迹误差和(b) 相对轨迹误差
SLAM结果
图5 显示了SuperPoint在三个场景中检测到的特征点,包括城市地区、农村农场和机房,具有两种不同的设置,即100个和400个特征点。可以看出,角落,边缘,颜色变化等特征被很好地检测到。此外,检测到的特征分布在图像中,因此算法对某些对象的依赖性较小。
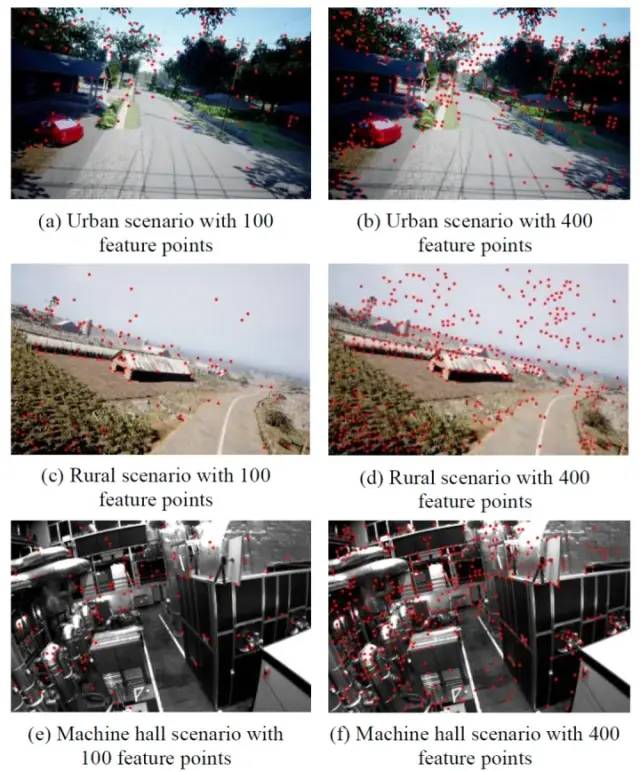
图5超级点检测到的特征点
图6显示了检测到的特征点在左右图像之间的对应关系。可以看出,大多数特征点都正确匹配,这意味着提取的深度信息是可靠的。

图6超级点检测到的特征点在不同时间捕获的两个图像帧之间的特征点的跟踪Δt=0.3s如图7a 所示。由于检测到的特征点分布在图像中,因此帧之间的共同特征点的数量得到了很好的维护,这对于稳定的SLAM非常重要。
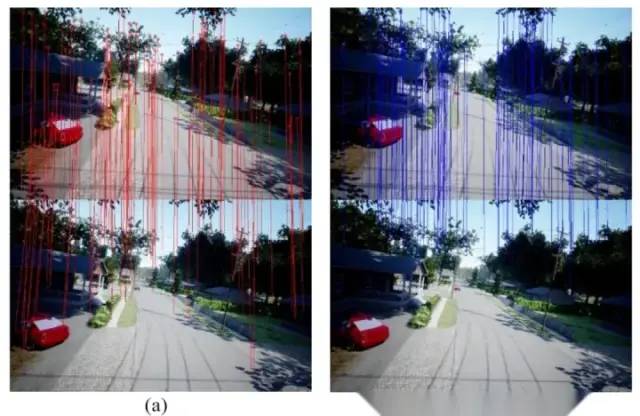
图7使用时差捕获(a) FAST和(b)两帧中的超级点的跟踪结果Δt=0.3s
图 8 显示了LoopF数据集的SLAM结果,其中无人机在农村农场上空飞行两轮。可以看出,最终估计的轨迹(红线)即使在近500米的长距离上也能很好地跟踪地面实况轨迹(黄线)。
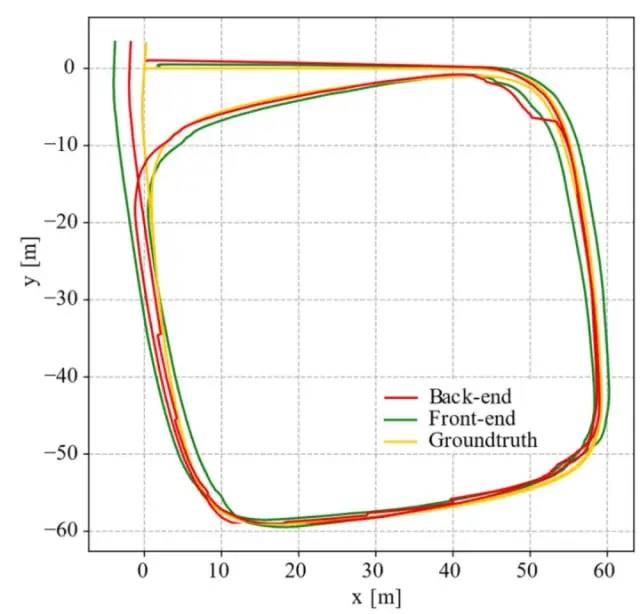
图8LoopF数据集的无人机轨迹包括地面实况轨迹(黄线)、前端估计(绿线)和后端估计(红线)
结果比较
为了进一步评估我们方法的性能,我们与OpenVINS 进行了比较,OpenVINS是一种最先进的SLAM系统,使用FAST进行特征提取。图9显示了FAST检测到的特征点。与SuperPoint不同,这些特征点集中在某些对象(如植物、房屋或机器)周围。因此,当物体移出场景时,不同时间拍摄的图像帧之间的共同特征点数量显着减少,如图7b所示。这个问题反过来又会影响SLAM的结果。
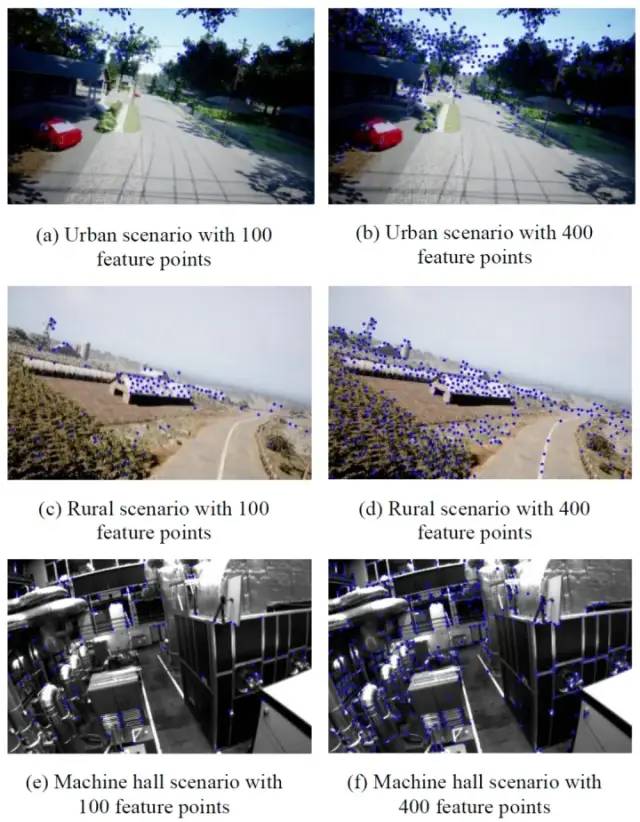
图9FAST检测到的特征点为了评估SupSLAM的性能,我们进行了许多实验,并与真实和合成数据集进行了比较。结果验证了我们提出的无人机系统的有效性和有效性。
-
什么是SLAM?视觉SLAM怎么实现?2023-08-21 13994
-
视觉SLAM笔记总结2020-07-17 2838
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 4736
-
基于视觉的slam自动驾驶2021-08-09 3042
-
激光SLAM和视觉VSLAM的分析比较2021-11-10 5335
-
视觉SLAM实现的关键方法有哪些详细资料总结2019-05-18 5119
-
视觉SLAM技术浅谈2019-08-09 2194
-
视觉SLAM深度解读2019-09-11 2643
-
科普|视觉SLAM是什么——三种视觉SLAM方案2020-04-17 58017
-
计算机视觉方向简介之视觉惯性里程计2021-04-07 4335
-
Snake-SLAM视觉惯性SLAM系统2022-06-16 703
-
基于SupSLAM视觉惯性SLAM方法在无人机中的应用研究2022-10-19 1630
-
基于深度学习的视觉SLAM综述2022-12-02 3321
-
视觉SLAM开源方案汇总 视觉SLAM设备选型2023-08-10 1955
-
视觉SLAM是什么?视觉SLAM的工作原理 视觉SLAM框架解读2023-09-05 5890
全部0条评论

快来发表一下你的评论吧 !
